本文主要是介绍Faster-RCNN基本思想和网络结构,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
简单来说,Faster RCNN = RPN + Fast RCNN
RPN 是指 Region Proposal Network,建议区域生成网络。 Faster RCNN 中用 RPN 来代替了 Fast RCNN 中的SS算法。
算法流程:
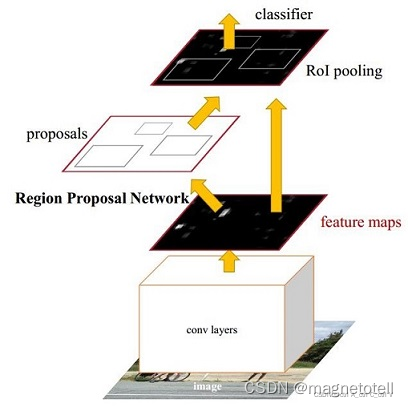
(1)将图像输入CNN网络得到相应的特征图。
(2)使用RPN网络生成候选框,将RPN生成的候选框投影到特征图上获得ROI区域的特征矩阵。
(3)将每个ROI区域的特征矩阵通过 ROI pooling 层缩放到7×7大小的特征图,接着将特征图展平为vector,之后通过一系列全连接层得到预测结果。
Faster RCNN 网络的基本结构如下:
4.2 RPN网络
4.2.1 RPN网络结构

图中的 conv feature map 是图像输入网络得到相应的特征图,通过sliding window处理之后产生一个256d的一维向量。该向量通过两个全连接层,分别输出分类概率scores和边界框回归参数coordinates,其中k是指 k个 anchor boxes,2k个scores是每个 anchor box 分别为前景和背景的概率(注意这里只区分前景和背景,所有的类别都归为前景),4k个coordinates是因为每个anchor box 有四个参数。
4.2.2 anchor的定义
那么什么是 anchor呢?
首先要明确,anchor不是候选框(Proposal),后面会提到二者的区别。
我们在特征图中找一个点,就可以在原图中找到对应的一个像素点,以该像素点为中心,画出9个不同大小和长宽比的框,称为anchor 。如下图所示,这些anchor里面可能包含目标,也可能没有目标。因为我们在一张图中想找的的目标的大小和长宽比并不是固定的,所以这里用9个不同大小和长宽比的anchor来进行预测。
那么为什么是9个anchor呢?
论文中给出了每个anchor的面积和长宽比:

所以特征图中的每个位置在原图中都会生成 3×3=9 个anchor,如下图所示,蓝色的三个anchor是面积为128×128的,红色是面积为256×256的,绿色是512×512的。
4.2.3 RPN生成proposal的过程
对于一张 1000x600x3 的图像(三通道),用3x3的卷积核进行特征提取得到60x40的特征图,则共有 60x40x9 (约2w个)个anchor。忽略超过图片边界的 anchor 后,剩下约 6000 个anchor。
对于这6000 个 anchor,通过RPN生成的边界框回归参数将每个 anchor 调整为proposal(前面提到了每个anchor经过RPN都输出2个概率和4个边界框回归参数),这里就能看到anchor和proposal的区别。这个过程就是 RPN 生成候选框的过程。
RPN 生成的候选框之间存在大量重叠,基于候选框的cls得分,采用非极大值抑制,IoU设为0.7,这样每张图片只剩下 2000 个候选框。
4.3 Faster RCNN框架
Faster RCNN 在Fast RCNN的基础上更进一步,将候选框生成也融入到CNN网络中,使得 候选框生成、特征提取、候选框分类、候选框边界回归这四大部分都结合在一个CNN网络中
这篇关于Faster-RCNN基本思想和网络结构的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



