本文主要是介绍Opencv-python接口:轮廓检测,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
相比C++而言,Python适合做原型。本系列的文章介绍如何在Python中用OpenCV图形库,以及与C++调用相应OpenCV函数的不同之处。这篇文章介绍在Python中使用OpenCV检测并绘制轮廓。
提示:
- 转载请详细注明原作者及出处,谢谢!
- 本文介绍在OpenCV-Python中检测并绘制轮廓的方法。
- 本文不介详细的理论知识,读者可从其他资料中获取相应的背景知识。笔者推荐清华大学出版社的《图像处理与计算机视觉算法及应用(第2版) 》。
轮廓检测
轮廓检测也是图像处理中经常用到的。OpenCV-Python接口中使用cv2.findContours()函数来查找检测物体的轮廓。
实现
使用方式如下:
需要注意的是cv2.findContours()函数接受的参数为二值图,即黑白的(不是灰度图),所以读取的图像要先转成灰度的,再转成二值图,参见4、5两行。第六行是检测轮廓,第七行是绘制轮廓。
结果
原图如下:
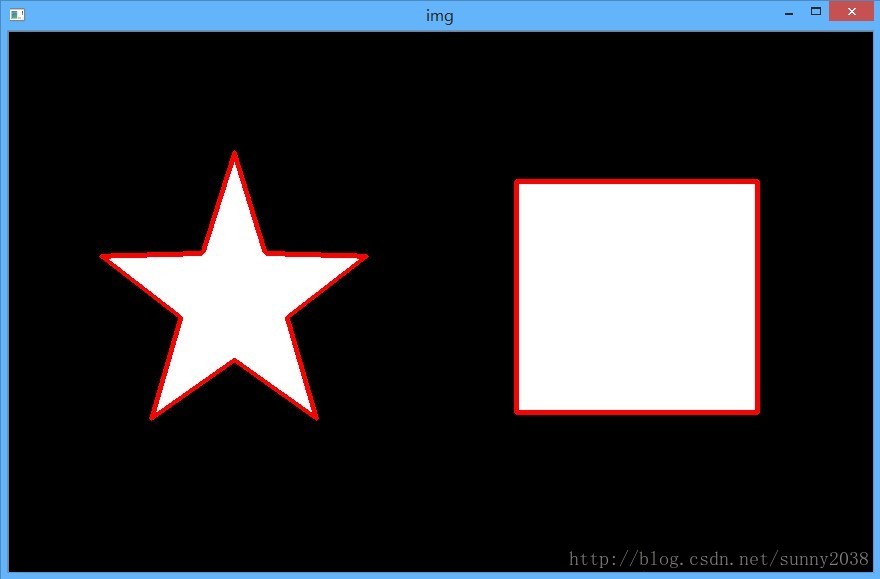
检测结果如下:
注意,findcontours函数会“原地”修改输入的图像。这一点可通过下面的语句验证:
cv2.findContours()函数
函数的原型为
返回两个值:contours:hierarchy。参数
第一个参数是寻找轮廓的图像;
第二个参数表示轮廓的检索模式,有四种(本文介绍的都是新的cv2接口):
cv2.RETR_EXTERNAL表示只检测外轮廓
cv2.RETR_LIST检测的轮廓不建立等级关系
cv2.RETR_CCOMP建立两个等级的轮廓,上面的一层为外边界,里面的一层为内孔的边界信息。如果内孔内还有一个连通物体,这个物体的边界也在顶层。
cv2.RETR_TREE建立一个等级树结构的轮廓。
第三个参数method为轮廓的近似办法
cv2.CHAIN_APPROX_NONE存储所有的轮廓点,相邻的两个点的像素位置差不超过1,即max(abs(x1-x2),abs(y2-y1))==1
cv2.CHAIN_APPROX_SIMPLE压缩水平方向,垂直方向,对角线方向的元素,只保留该方向的终点坐标,例如一个矩形轮廓只需4个点来保存轮廓信息
cv2.CHAIN_APPROX_TC89_L1,CV_CHAIN_APPROX_TC89_KCOS使用teh-Chinl chain 近似算法
返回值
cv2.findContours()函数返回两个值,一个是轮廓本身,还有一个是每条轮廓对应的属性。
contour返回值
cv2.findContours()函数首先返回一个list,list中每个元素都是图像中的一个轮廓,用numpy中的ndarray表示。这个概念非常重要。在下面drawContours中会看见。通过可以验证上述信息。会看到本例中有两条轮廓,一个是五角星的,一个是矩形的。每个轮廓是一个ndarray,每个ndarray是轮廓上的点的集合。
由于我们知道返回的轮廓有两个,因此可通过
输出两个轮廓中存储的点的个数,可以看到,第一个轮廓中只有4个元素,这是因为轮廓中并不是存储轮廓上所有的点,而是只存储可以用直线描述轮廓的点的个数,比如一个“正立”的矩形,只需4个顶点就能描述轮廓了。
hierarchy返回值
此外,该函数还可返回一个可选的hiararchy结果,这是一个ndarray,其中的元素个数和轮廓个数相同,每个轮廓contours[i]对应4个hierarchy元素hierarchy[i][0] ~hierarchy[i][3],分别表示后一个轮廓、前一个轮廓、父轮廓、内嵌轮廓的索引编号,如果没有对应项,则该值为负数。
通过
可以看出,hierarchy本身包含两个ndarray,每个ndarray对应一个轮廓,每个轮廓有四个属性。
轮廓的绘制
OpenCV中通过cv2.drawContours在图像上绘制轮廓。
cv2.drawContours()函数
- 第一个参数是指明在哪幅图像上绘制轮廓;
- 第二个参数是轮廓本身,在Python中是一个list。
- 第三个参数指定绘制轮廓list中的哪条轮廓,如果是-1,则绘制其中的所有轮廓。后面的参数很简单。其中thickness表明轮廓线的宽度,如果是-1(cv2.FILLED),则为填充模式。绘制参数将在以后独立详细介绍。
补充:
写着写着发现一篇文章介绍不完,所以这里先作为入门的。更多关于轮廓的信息有机会再开一篇文章介绍。
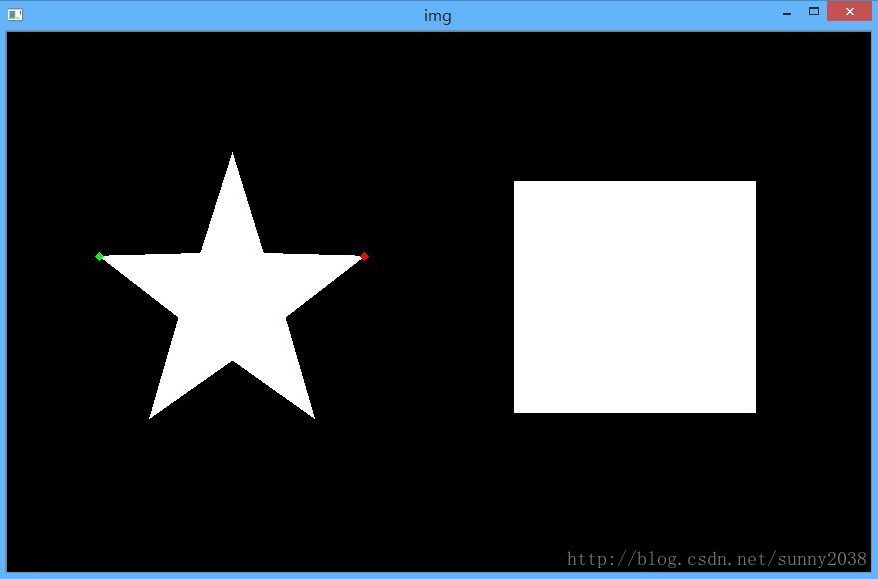
但有朋友提出计算轮廓的极值点。可用下面的方式计算得到,如下
注意!假设轮廓有100个点,OpenCV返回的ndarray的维数是(100, 1, 2)!!!而不是我们认为的(100, 2)。切记!!!人民邮电出版社出版了一本《NumPy攻略:Python科学计算与数据分析》,推荐去看一下。
更新:关于pentagram[:,0]的意思
在numpy的数组中,用逗号分隔的是轴的索引。举个例子,假设有如下的数组:
其shape是(5, 1, 2)。与我们的轮廓是相同的。那么a[:,0]的结果就是: 这里a[:,0]的意思就是a[0:5,0],也就是a[0:5,0:0:2] ,这三者是等价的 。回头看一下,a的shape是(5,1,2),表明是三个轴的。在numpy的数组中,轴的索引是通过逗号分隔的。同时冒号索引“:”表示的是该轴的所有元素。因此a[:, 0]表示的是第一个轴的所有元素和第二个轴的第一个元素。在这里既等价于a[0:5, 0]。
再者,若给出的索引数少于数组中总索引数,则将已给出的索引树默认按顺序指派到轴上。比如a[0:5,0]只给出了两个轴的索引,则第一个索引就是第一个轴的,第二个索引是第二个轴的,而第三个索引没有,则默认为[:],即该轴的所有内容。因此a[0:5,0]也等价于a[0:5,0:0:2]。
再详细一点,a的全体内容为:[[[3,4]], [[1,2]],[[5,7]],[[3,7]],[[1,8]]]。去掉第一层方括号,其中有五个元素,每个元素为[[3,4]]这样的,所以第一个索引的范围为[0:5]。注意OpenCV函数返回的多维数组和常见的numpy数组的不同之处!
观察[[3,4]],我们发现其中只有一个元素,即[3, 4],第二个索引为[0:1]。
再去掉一层方括号,我们面对的是[3,4],有两个元素,所以第三个索引的范围为[0:2]。
再次强调一下OpenCVPython接口函数返回的NumPy数组和普通的NumPy数组在组织上的不同之处。
得到的结果为如下:
参考资料:
1、《Opencv2 Computer Vision Application Programming Cookbook》
2、《OpenCV References Manule》
3、OpenCV官方文档Contour部分
这篇关于Opencv-python接口:轮廓检测的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






