本文主要是介绍【数据结构(邓俊辉)学习笔记】图04——双连通域分解,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 0. 概述
- 1 关节点与双连通域
- 2 蛮力算法
- 3 可行算法
- 4 实现
- 5 示例
- 6 复杂度
0. 概述
学习下双连通域分解,这里略微有一点点难,这个算是DFS算法的非常非常经典的应用,解决的问题也非常非常有用。
1 关节点与双连通域
连通性很好理解,两个点在图中只要有一条路径,不管是无向的还是有向的,只要互相可达,就说他们是连通的。但有的时候会要求更严些,不仅要保证自己和某些地方的连通,还要保证某个区域不会变成独立的,另一个角度可以从关节点来理解。

明确下几个术语
考查无向图G。若删除顶点v后G所包含的连通域增多,则v称作切割节点(cut vertex)或关节点(articulation point)。
~
如图C即是一个关节点——它的删除将导致连通域增加两块。反之,不含任何关节点的图称作双连通图。任一无向图都可视作由若干个极大的双连通子图组合而成,这样的每一子图都称作原图的一个双连通域(bi-connected component)。
~
例如右上图中的无向图,可分解为右下图所示的三个双连通域。
任何一张连通的无向图都存在着若干个关键点,而且以这些关键点为界,可以将其分割为若干个双连通部分——BCC分量。
较之其它顶点,关节点更为重要。在网络系统中它们对应于网关,决定子网之间能否连通。在航空系统中,某些机场的损坏,将同时切断其它机场之间的交通。故在资源总量有限的前提下,找出关节点并重点予以保障,是提高系统整体稳定性和鲁棒性的基本策略。
那么怎么计算?给一个任意的图,如何将其分解为一个一个又一个BCC分量呢?作为查找结果的副产品——关键点,怎么得到?
2 蛮力算法
由其定义,可直接导出蛮力算法大致如下:
- 首先,通过BFS或DFS搜索统计出图G所含连通域的数目;
- 然后逐一枚举每个顶点v,暂时将其从图G中删去,并再次通过搜索统计出图G{v}所含连通域的数目。
- 于是,顶点v是关节点,当且仅当图G{v}包含的连通域多于图G。
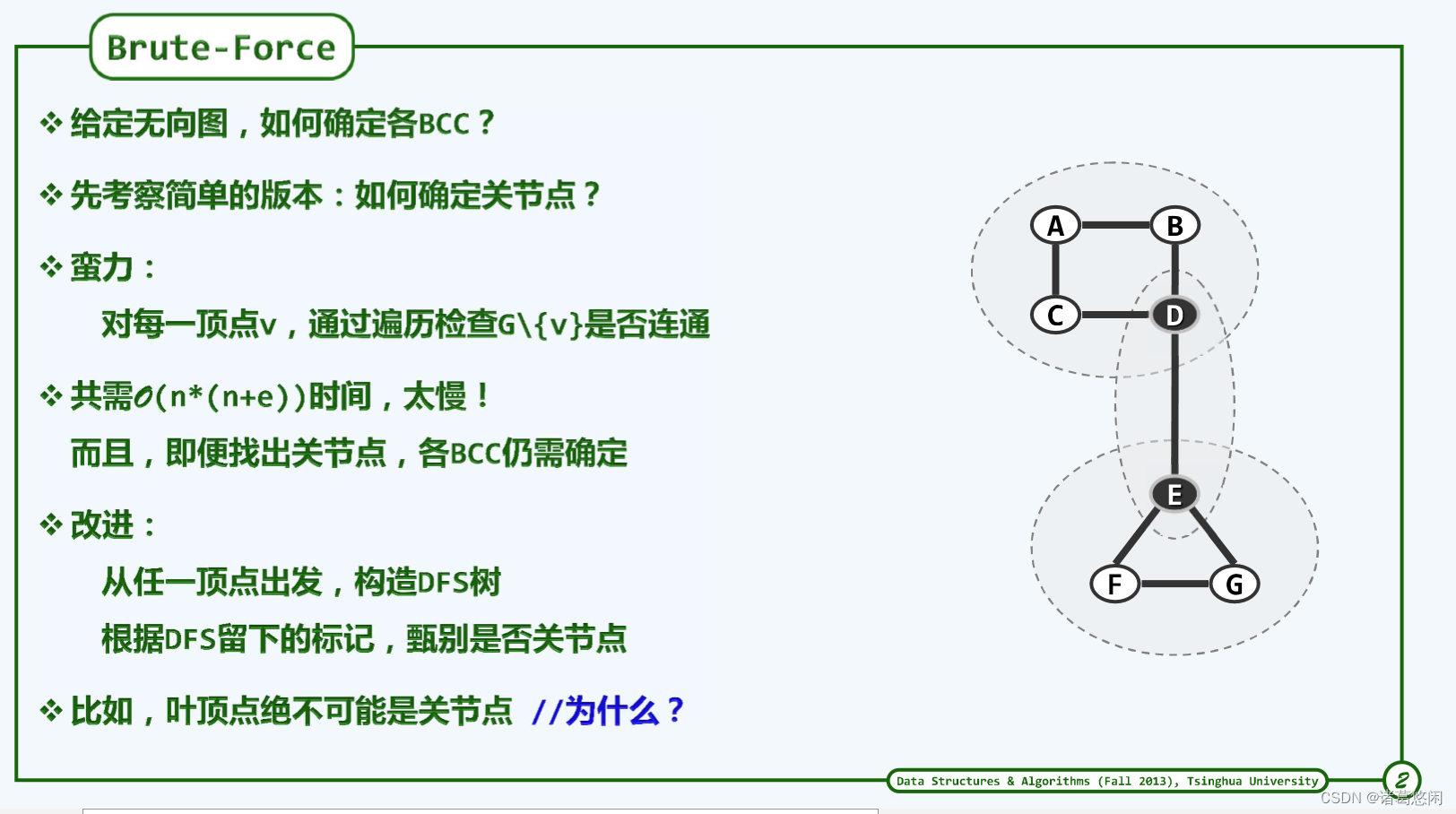
这一算法需执行n趟搜索,耗时O(n(n + e)),如此低的效率无法令人满意。
3 可行算法
经DFS搜索生成的DFS树,表面上看似乎“丢失”了原图的一些信息,但实际上就某种意义而言,依然可以提供足够多的信息。
- 先分析下根节点 情况
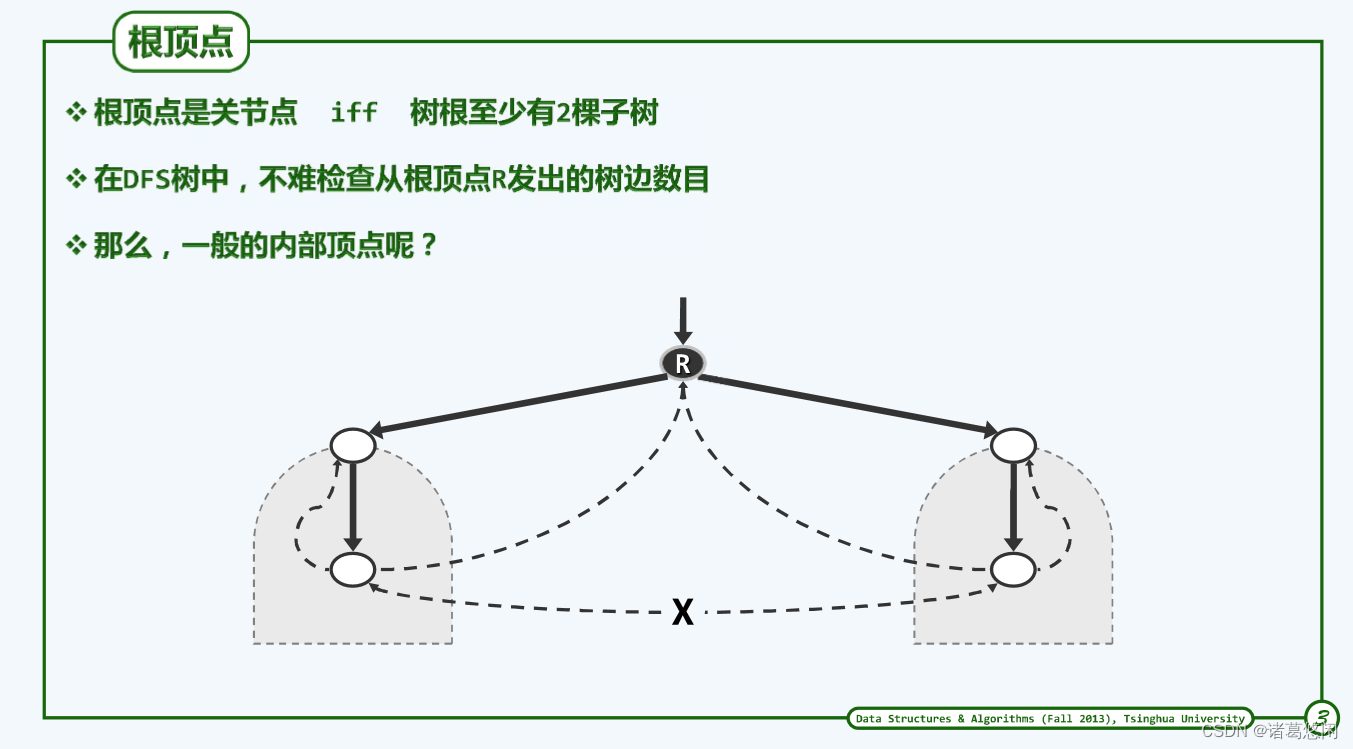
DFS树中的叶节点,绝不可能是原图中的关节点
此类顶点的删除既不致影响DFS树的连通性,也不致影响原图的连通性。
此外,DFS树的根节点若至少拥有两个分支,则必是一个关节点。
如上图,在原无向图中,根节点R的不同分支之间不可能通过跨边相联(算法中为什么讨论cross edge?因为讨论的是有向图),R是它们之间唯一的枢纽。
~因此,这里也得出个结论:在无向图的DFS中是不可能有cross edge和forward edge,只有back word 回向边。
~
反之,若根节点仅有一个分支,则与叶节点同理,它也不可能是关节点。
- 那么,又该如何甄别一般的内部节点是否为关节点呢?
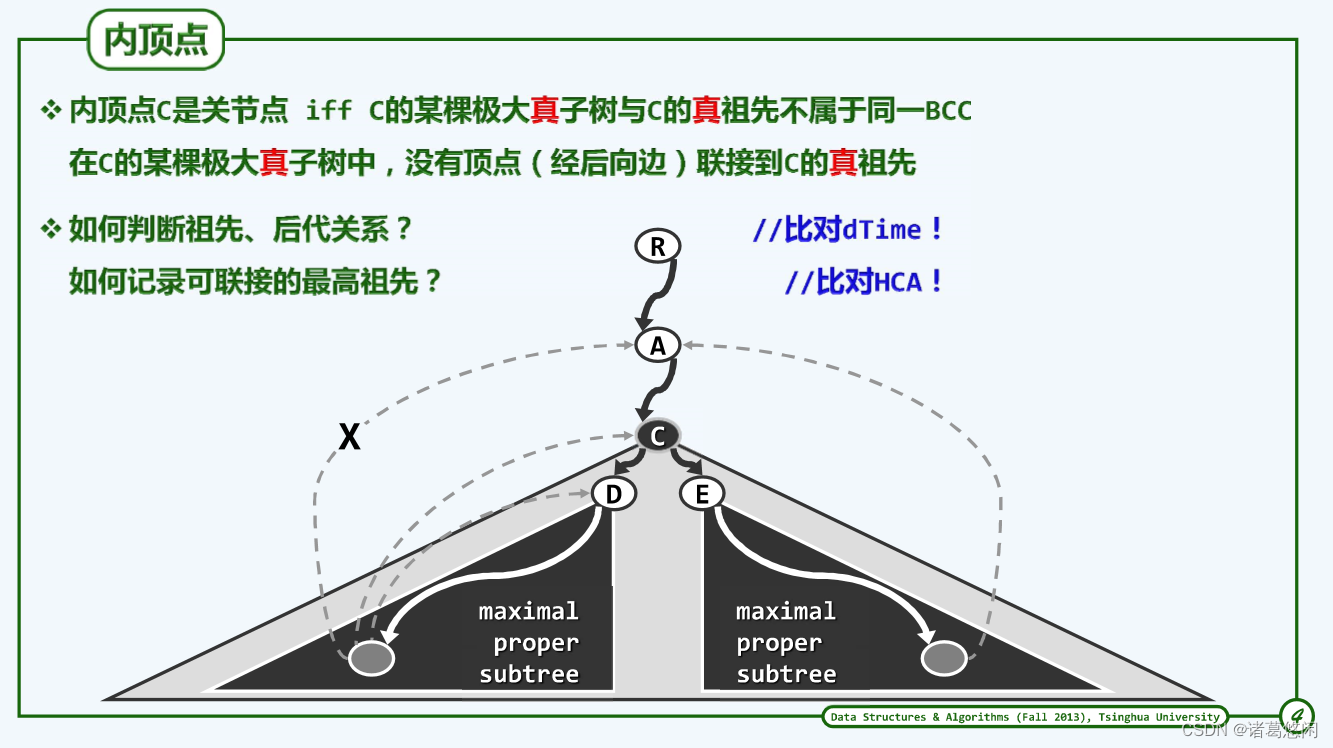
考查上图中的内部节点C。若节点C的移除导致其某一棵(比如以D为根的)真子树与其真祖先(比如A)之间无法连通,则C必为关节点。反之,若C的所有真子树都能(如以E为根的子树那样)与C的某一真祖先连通,则C就不可能是关节点。
以D为根的真子树经过一系列访问后,会生成一系列tree edge和back edge,关键在于back edge。形象来说,若back edge往上指的不是那么高,准确来讲,不会高过父亲C,则C就是关键点。因为C若消失,则以D为根的真子树就会变成孤岛。
当然,在原无向图的DFS树中,C的真子树只可能通过后向边与C的真祖先连通。因此,只要在DFS搜索过程记录并更新各顶点v所能(经由后向边)连通的最高祖先(highest connected ancestor, HCA)hca[v],即可及时认定关节点,并报告对应的双连通域。
以E为根的真子树中的back edge往上指的更高,准确来讲,高过父亲C,则C就不是关键点。因为C若消失,则以E为根的真子树也会通过back edge保持连通。
因此通过遍历需要得到很重要指标 dTime 和 HCA,算法大体框架
- 由括号引理: dTime越小的祖先,辈份越高
- DFS过程中,一旦发现后向边(v,u) ~~~~ 即取:hca(v) = min( hca(v) , dtime(u) )
- DFS(u) 完成并返回v时 ~~~~ 若有:hca(u) < dTime(v) ~~~~ 即取:hca(v) = min( hca(v), hca(u) ) ~~~~ 否则,即可判定:v系关节点,且 {v} + subtree(u) 即为一个BCC。
- 那么如何实现?
4 实现
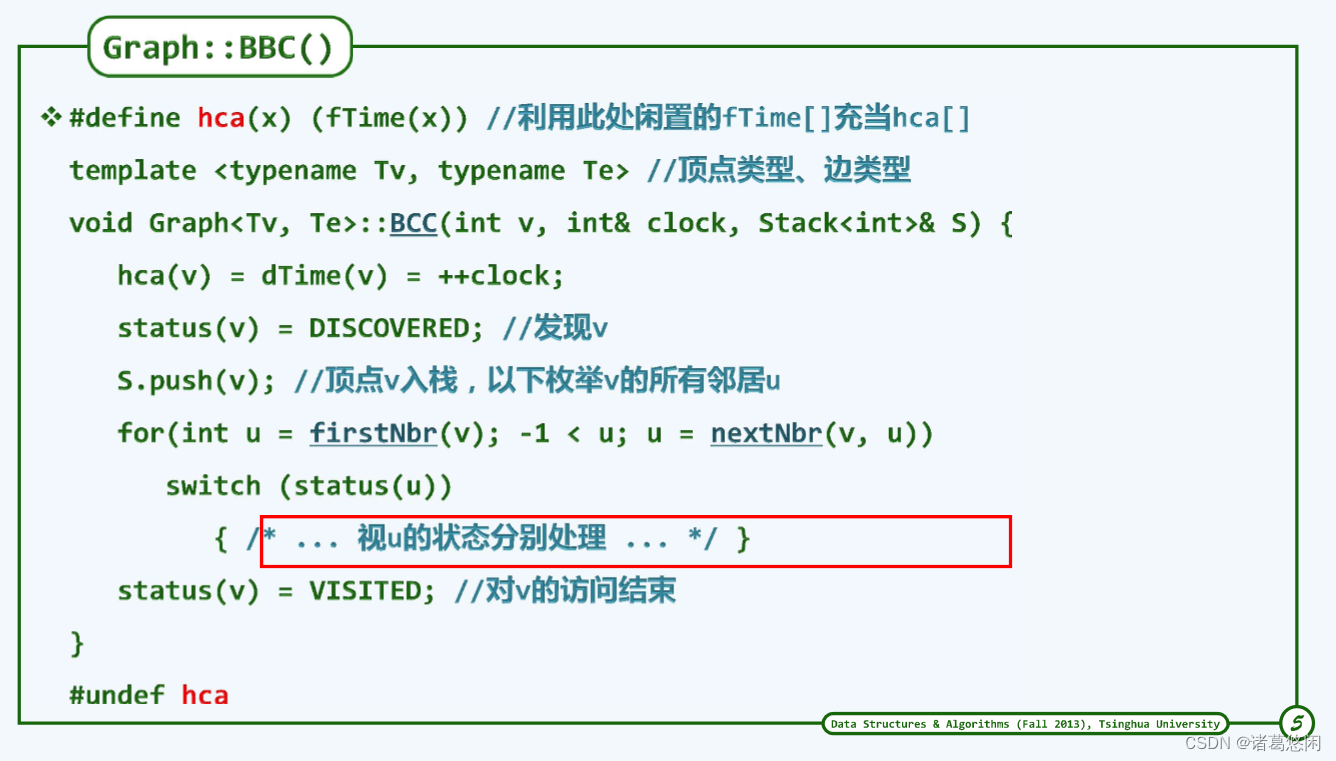
算法来看就是典型的DFS,这里改个名字叫BCC,这里利用闲置的fTime充当hca。
- 看下u分别有哪些状态需要处理?
首先看下UNDISCOVERED状态,既tree edge
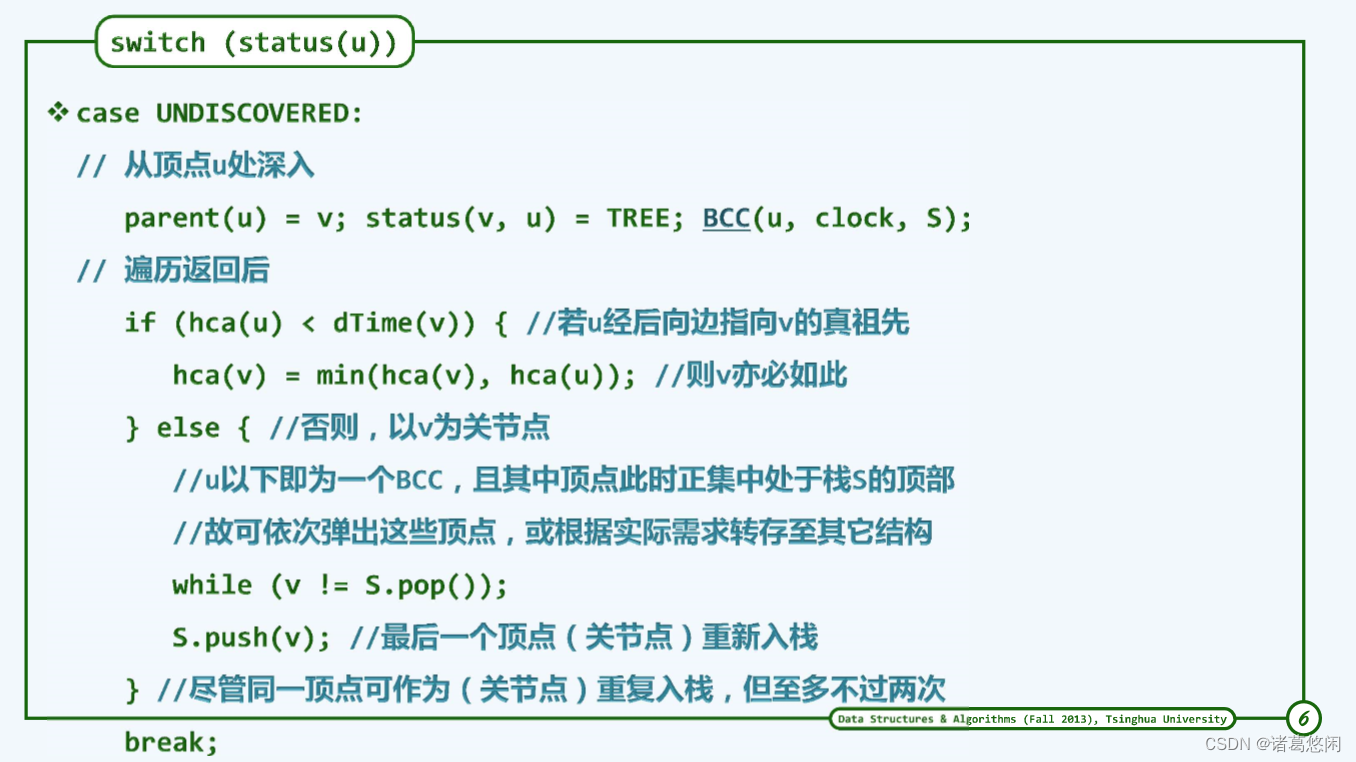
在从顶点u处深入到遍历返回后之间的代码逻辑与DFS几乎一致,当遍历返回后,v的hca便已确定。故DFS搜索在顶点v的孩子u处返回之后,通过比较hca[u]与dTime[v]的大小,即可判断v是否关节点。
- 若hca[u] ≥ dTime[v],则说明u及其后代无法通过后向边与v的真祖先连通,故v为关节点。既然栈S存有搜索过的顶点,与该关节点相对应的双连通域内的顶点,此时都应集中存放于S顶部,故可依次弹出这些顶点。v本身必然最后弹出,作为多个连通域的联接枢纽,它应重新进栈。
- 反之若hca[u] < dTime[v],则意味着u可经由后向边连通至v的真祖先。果真如此,则这一性质对v同样适用,故有必要将hca[v],更新为hca[v]与hca[u]之间的更小者。
再看下DISCOVERED 和VISITED(这个状态只有有向边才有,这里可不关注,只是为了和DFS作对比)
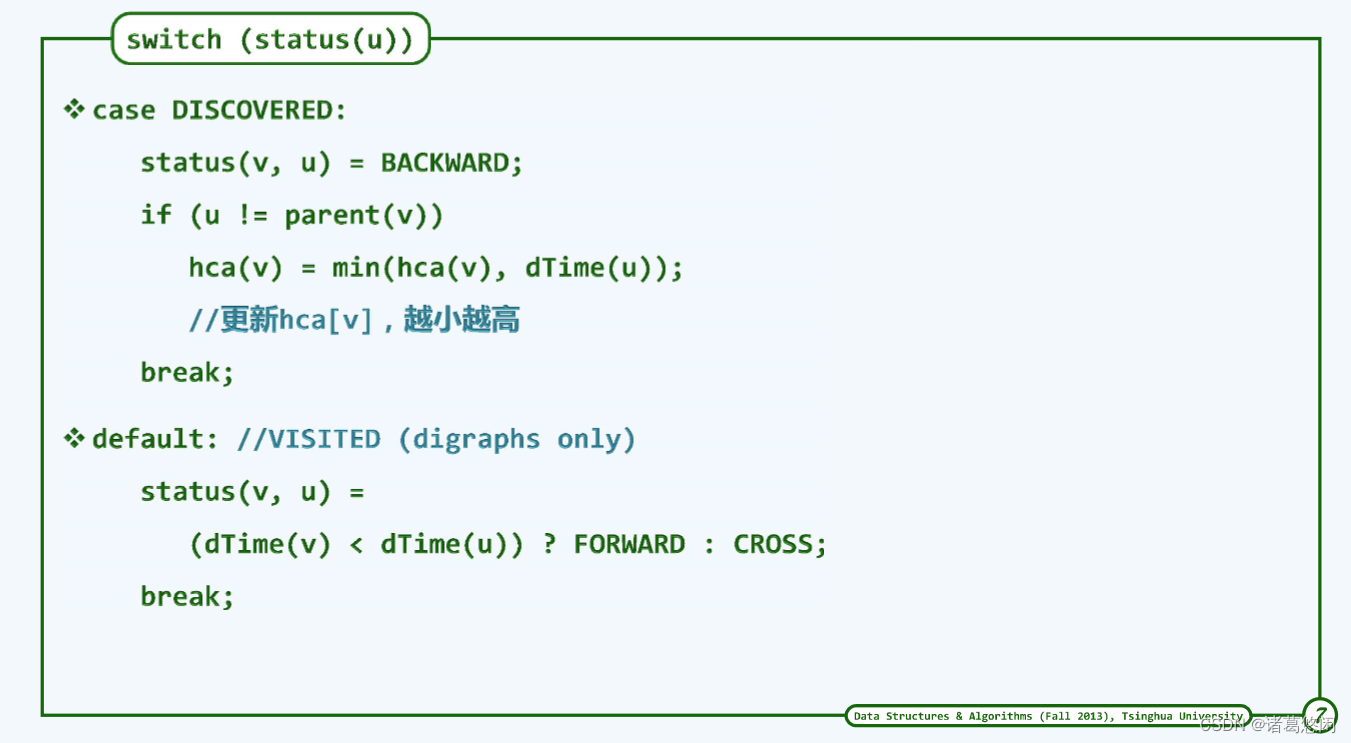
当然,每遇到一条后向边(v, u),也需要及时地将hca[v],更新为hca[v]与dTime[u]之间的更小者,以保证hca[v]能够始终记录顶点v可经由后向边向上连通的最高祖先。
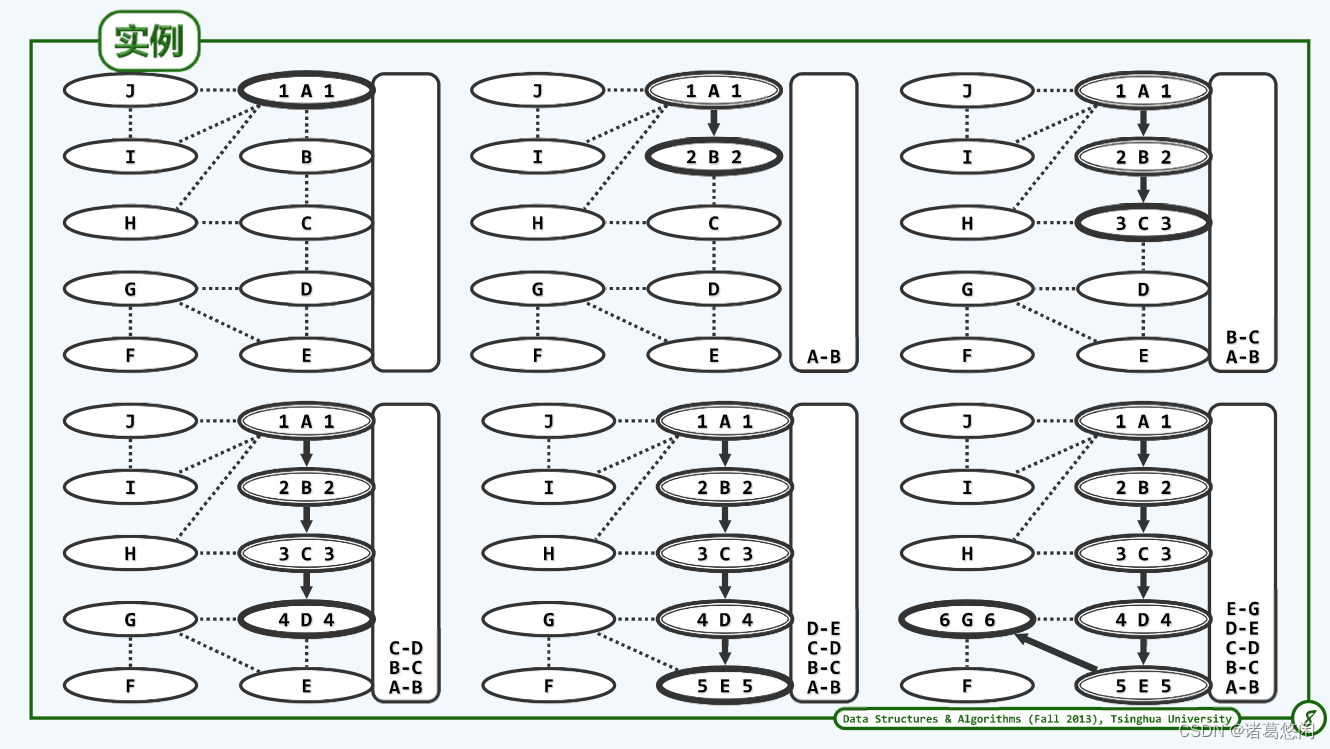
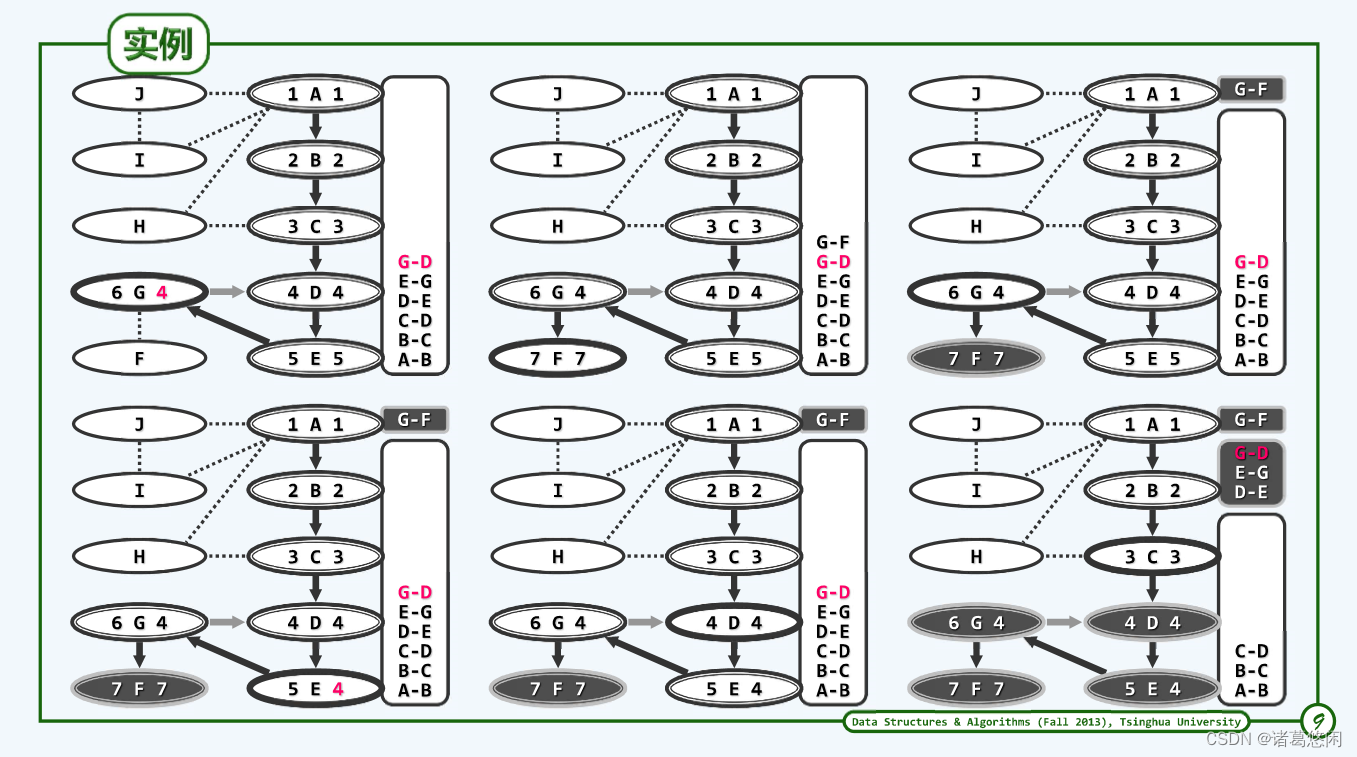
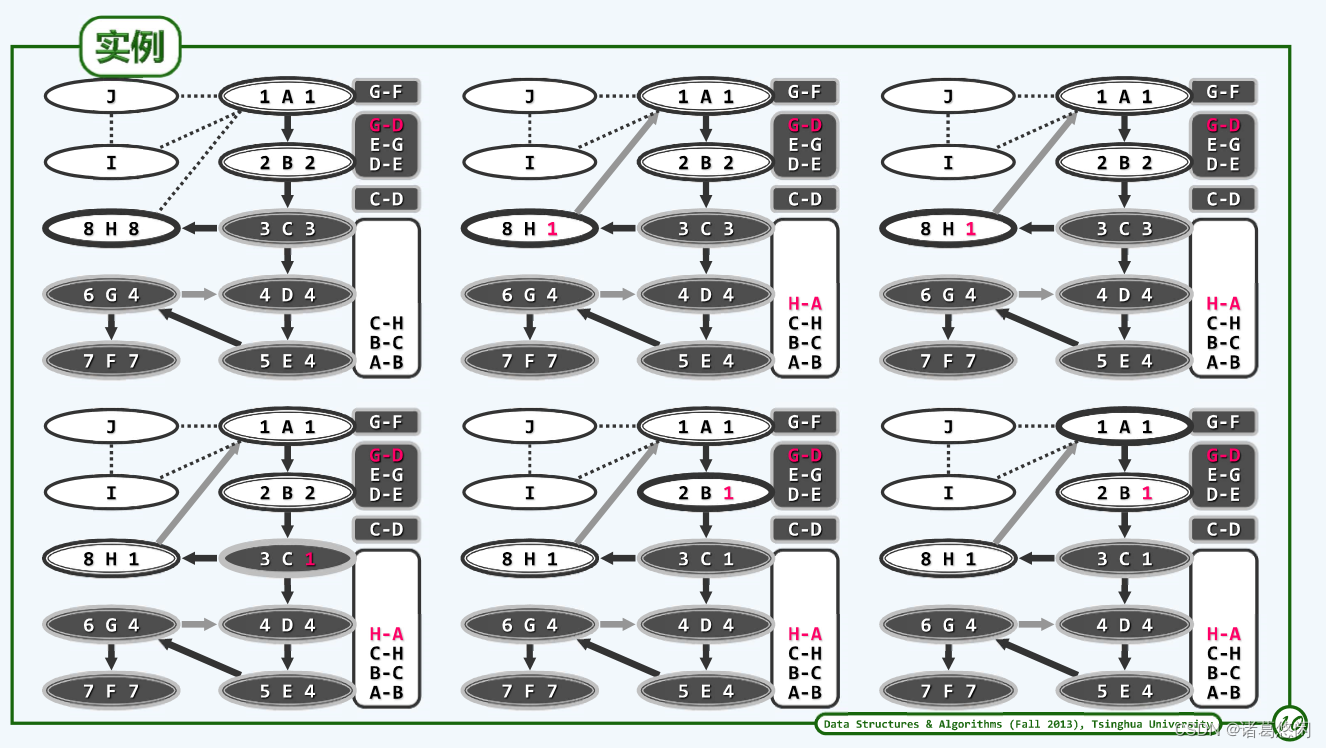
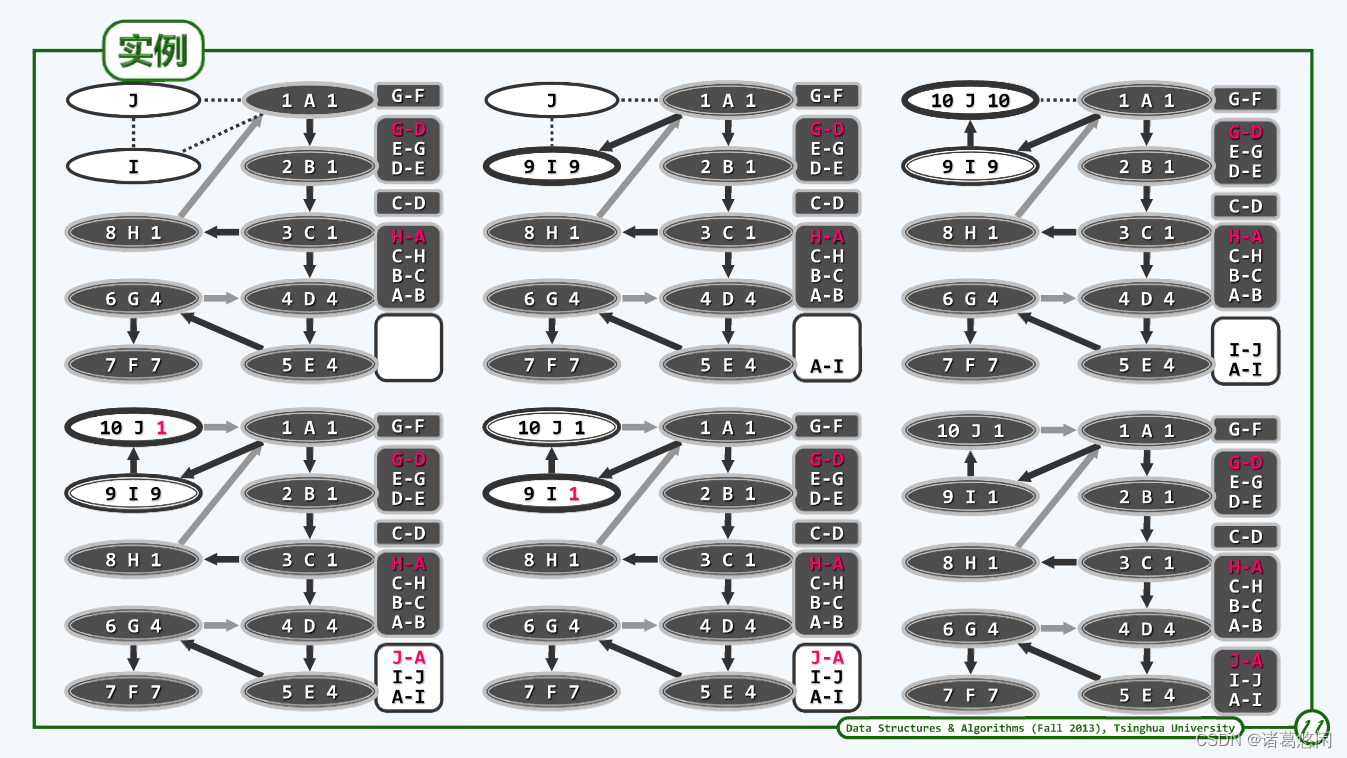
5 示例
6 复杂度
与基本的DFS搜索算法相比,这里只增加了一个规模O(n)的辅助栈,故整体空间复杂度仍为O(n + e)。时间方面,尽管同一顶点v可能多次入栈,但每一次重复入栈都对应于某一新发现的双连通域,与之对应地必有至少另一顶点出栈且不再入栈。因此,这类重复入栈操作不会超过n次,入栈操作累计不超过2n次,故算法的整体运行时间依然是O(n + e)。
这篇关于【数据结构(邓俊辉)学习笔记】图04——双连通域分解的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









