本文主要是介绍分析示例 | Simufact焊接工艺仿真变形精确预测汽车结构,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
导语
焊接是汽车制造过程中一个关键环节,白车身、发动机、底盘和变速箱等都离不开焊接工艺的应用,主要涉及气保焊、电阻点焊、激光焊、电子束焊等多种焊接工艺。由于汽车车型众多、成形结构复杂、汽车制造质量、效率、成本等方面的综合要求。如何高效、低成本的研发出合理的焊接工艺,对焊接工艺工程师无疑是个巨大的挑战。
传统的焊接工艺开发,需要依靠工艺开发经验以及大量试验数据的积累,而对于新的焊接工艺开发,需要借助多次试错经验来获取符合产品质量要求的工艺,但制定的工艺有没有更佳的替代方案,这个有待进一步考证。在试错过程中,实际数据的测量也是一个重大的挑战。通过焊接仿真分析,可以实时的获取焊接过程中的变形结果,并可以根据每道焊缝的焊接变形、应力等的结果来进行实时分析,不仅数据的提取也变得更加方便,也给焊接工艺开发规划提供了强有力的数据支撑,更容易规划出合理的焊接顺序、焊接装夹位置等焊接工艺参数。
Simufact welding焊接工艺仿真方案
工业软件Simufact.welding,作为世界领先的专业焊接工艺仿真软件,能够有效协助工程师对焊接工艺参数、焊接顺序、焊接工装夹具、焊接方向等进行焊接工艺仿真分析,不仅能分析焊接过程中的焊接变形、应力等还能对焊接后冷却和工装夹具卸载后的焊接变形、焊接残余应力等进行分析。通过使用Simufact.welding进行虚拟试错,能获取最优的焊接工艺方案,具有减少试错次数、缩短工艺研发周期,节省人力、材料成本等优势,为企业带来可观的成本收益。
汽车案例举例
上海大众汽车有限公司作为Simufact的资深客户,已经熟练使用Simufact welding解决实际结构件的焊接变形问题,随着仿真数据及仿真经验的积累,针对不同结构和焊接工艺,已经具备一些仿真判断标准。一些结构焊接工艺的规划,经过Simufact welding仿真验证后,帮助其提升了焊接变形质量控制,受益明显。
以下案例来自上海大众汽车有限公司,展示了Simufact welding焊接工艺仿真软件变形结果与实际焊接变形结果对比。结构分别为B柱热成型板激光焊接案例以及白车身侧围门框焊接变形。
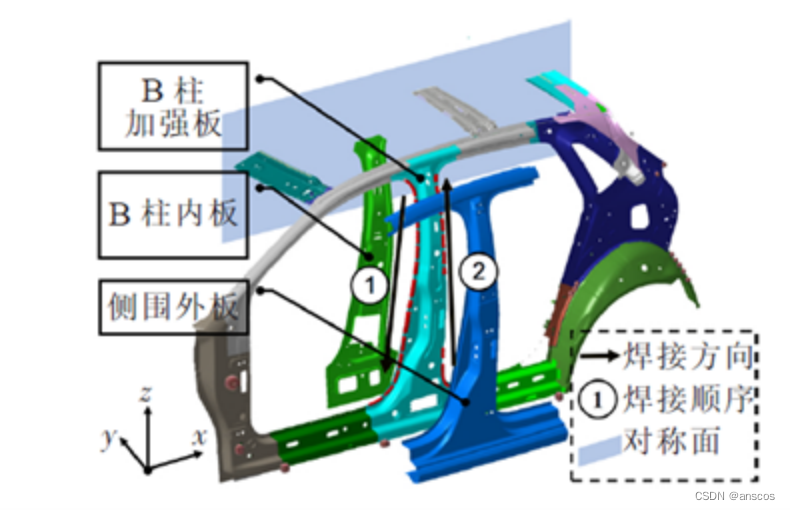
上海大众汽车有限公司通过使用Simufact welding焊接仿真软件,深刻认识到精确的仿真结果需要结合实际焊接工艺仿真,如下图所示为实际焊装、焊接顺序工艺。

Simufact welding焊接仿真软件可以导入实际焊接夹具的工装模型,按照工装夹具的作用类型、作用力、作用时间等设置,焊接顺序、焊接工艺参数等也可以按照实际焊接工艺参数进行设置。

为了获得更精确的结果,需要进行热源校核,以保证仿真的熔池与实际熔池尺寸对应。Simufact welding具有热计算功能,并且具有焊枪监视器功能,可以实时的监控焊接,快速高效的校核出热源模型。

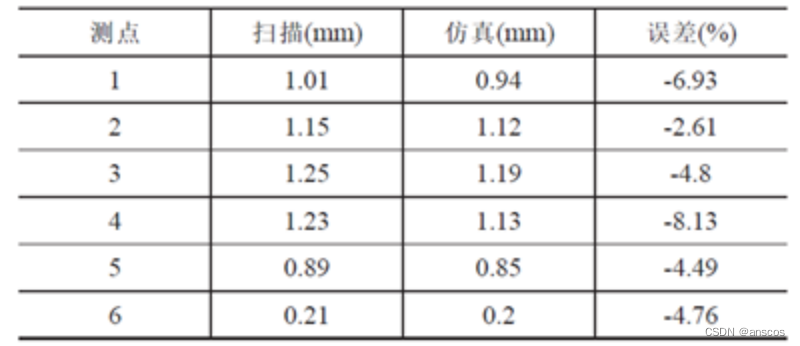
Simufact welding具有表面偏差功能,可以实现仿真结果与CAD设计模型、扫描结果进行比较分析,方便更直观的对变形进行详细分析。不仅如此,还同样支持变形分量的对比,用以研究主要变形方向的变形结果。如下图所示,对比了仿真结果与实际扫描结果,根据对比,仿真结果与实际扫描结果对应非常好。

通过关注的6个测量点的数据对比分析,可以看到,扫描的变形结果与仿真的变形结果最小的误差只有2.61%,最大的变形误差为8.13%。
同样的方法,对侧围门框激光焊接工艺进行仿真,按照实际的工装、焊接顺序、焊接方向、焊接工艺参数,在Simufact welding建立焊接仿真模型,模型如下图所示:
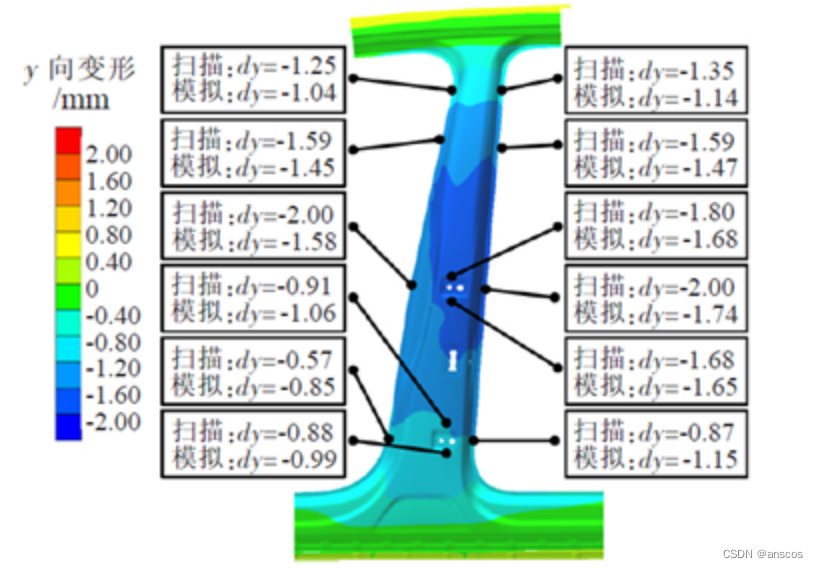
通过与实际物理试验扫描结果对比,Simufact welding 焊接变形仿真结果与实际焊接变形非常接近,获得了较高的仿真精度,大部分位置的变形误差控制在10%以内,其中B 柱铰链孔附近y向变形最大,预测结果为1.74mm,扫描结果为2.00mm,相对误差13%,在仿真分析中,这个误差也认为在合理的误差内。这个仿真分析中没有考虑钣金冲压成形产生的残余应力、回弹、壁厚减薄等对焊接工艺的影响。Simufact welding可以与Simufact forming钣金冲压成形功能实现冲压-焊接、焊接-冲压等工艺链仿真,充分考虑了实际的制造工艺链。
总 结
● 通过Simufact welding对热成型B柱激光焊接过程进行分析,与实际扫描结果对比,仿真结果与实际结果一致性较好,验证了Simufact welding焊接变形仿真分析的可靠性;
● 通过Simufact welding对白车身侧围外板激光焊接过程的仿真分析,与实际扫描结果对比,仿真结果与实际变形结果对应较好,再次验证了Simufact welding焊接变形仿真分析的可靠性;
● 通过Simufact welding对焊接工艺过程的仿真,可以对焊接工艺参数、工装夹具、焊接顺序、焊接方向等进行仿真分析,可以对焊接变形、焊接残余应力、熔池、热影响区、相组织、温度场等进行仿真分析,代替或减少物理试错,节省人力、物力,缩短研发周期,助力焊接工艺开发。
参考文献:
黄平华,王庆,基于焊接模拟的B柱激光焊接变形预测[J].热加工工艺,2018, 47(11):207-210.
更多信息 请关注庭田科技
全国热线:400 633 6258
官方邮箱:info@anscos.com
【文章来自海克斯康工业软件】
这篇关于分析示例 | Simufact焊接工艺仿真变形精确预测汽车结构的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






