本文主要是介绍CUDA中线程索引计算方法,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
由于项目需要用到GPU,所以最近开始学习CUDA编程模型,刚开始接触,先搞清楚线程关系和内存模型是非常重要的,但是发现书上和许多博客关于线程这些关系没讲明白,所以就着自己的理解,做点笔记,欢迎讨论。
这篇文章针对于已经了解过了CUDA线程的相关知识,最好已经动手写过CUDA C的代码,而对并行线程感到迷惑,不知道怎么计算线程索引的读者,如果没接触过,那么先看看书,敲两段代码跑跑,如果你理解了那么恭喜你,如果还有疑惑,那么再来看看这篇文章,或许有帮助。
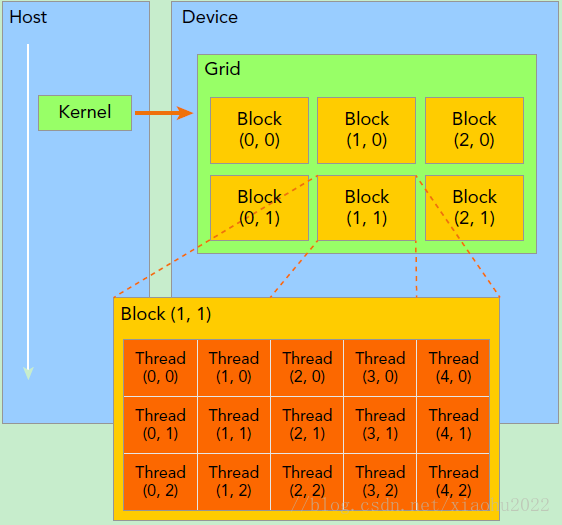
首先,看看GPU的Kernel上的两层线程组织结构
下面我们来看一段代码,其功能是对两个数组求和,并保存到另一个数组,很简单吧~
#include <cuda_runtime.h>
#include <device_launch_parameters.h>
#include <iostream>using namespace std;// 二:线程执行代码
__global__ void vector_add(float* vec1, float* vec2, float* vecres, int length) {int tid = threadIdx.x;if (tid < length) {vecres[tid] = vec1[tid] + vec2[tid];}
}int main() {const int length = 16; // 数组长度为16float a[length], b[length], c[length]; // host中的数组for (int i = 0; i < length; i++) { // 初始赋值a[i] = b[i] = i;}float* a_device, *b_device, *c_device; // device中的数组cudaMalloc((void**)&a_device, length * sizeof(float)); // 分配内存cudaMalloc((void**)&b_device, length * sizeof(float));cudaMalloc((void**)&c_device, length * sizeof(float));cudaMemcpy(a_device, a, length * sizeof(float), cudaMemcpyHostToDevice); // 将host数组的值拷贝给device数组cudaMemcpy(b_device, b, length * sizeof(float), cudaMemcpyHostToDevice);// 一:参数配置dim3 grid(1, 1, 1), block(length, 1, 1); // 设置参数vector_add<<<grid,block>>>(a_device, b_device, c_device, length); // 启动kernelcudaMemcpy(c, c_device, length * sizeof(float), cudaMemcpyDeviceToHost); // 将结果拷贝到hostfor (int i = 0; i < length; i++) { // 打印出来方便观察cout << c[i] << " ";}cout << endl;system("pause");return 0;
}
运行结果:

首先,我们要明白,上面的代码计算的是两个一维向量的和。由于数组大小是16,所以我们使用了16个线程来计算。
dim3 grid(1, 1, 1), block(length, 1, 1); // 设置参数先说grid,在这段代码中,我们设置参数为线程格(grid)中只有一个一维的block,该block的x维度上有16个,这个应该一下就看出来啦。因为grid(x,y,z)中的x=1,y=1,z=1,即各个维度均为1,所以是一维的,数量为xyz=111=1。如果没明白,再看两个例子:
dim3 grid1(2, 1, 1); // x=2, y=1, z=1
dim3 grid2(4, 2, 1); // x=4, y=2, z=1
dim3 grid3(2, 3, 4); // x=2, y=3, z=4
可以知道,grid1是一维的(因为y,z维度是1),grid2是二维的(因为z维度是1),grid3是三维的,且grid1,grid2,grid3中分别有2、8、24个block。
同理,对于线程块(block),我们知道之前的代码中,block中存在16个线程,且该线程块维度是一维的,因为block(x,y,z)中x=length=16,y=1,z=1。
我画个图来帮助理解,大概就是这样子的:
dim3 grid(1, 1, 1), block(length, 1, 1); // 设置参数
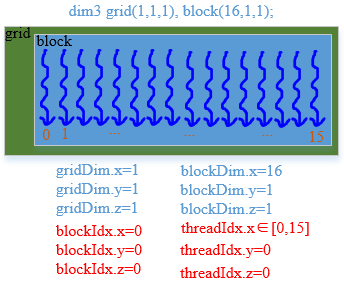
OK,我想这下应该就清楚了,就是一个一维的block(此处只有x维度上存在16个线程)。所以,內建变量只有一个在起作用,就是threadIdx.x,它的范围是[0,15]。因此,我们在计算线程索引是,只用这个內建变量就行了(其他的为0,写了也不起作用):
// 二:线程执行代码
__global__ void vector_add(float* vec1, float* vec2, float* vecres, int length) {int tid = threadIdx.x; // 只使用了threadIdx.xif (tid < length) {vecres[tid] = vec1[tid] + vec2[tid];}
}
OK,看到这里,你可能还是不大明白什么一维二维的,我们再来看一个:
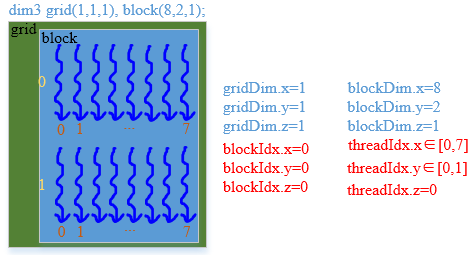
dim3 grid(1, 1, 1), block(8, 2, 1); // 设置参数
// 二:线程执行代码
__global__ void vector_add(float* vec1, float* vec2, float* vecres, int length) {int tid = threadIdx.y * blockDim.x + threadIdx.x; // 使用了threadIdx.x, threadIdx.x, blockDim.xif (tid < length) {vecres[tid] = vec1[tid] + vec2[tid];}
}
我们一定要有并行思想,这里有16个线程,kernel启动后,每个线程都有自己的索引号,比如某个线程位于grid中哪个维度的block(即blockIdx.x,block.y,block.z),又位于该block的哪个维度的线程(即threadIdx.x,threadIdx.y,threadIdx.z),利用这些线程索引号映射到对应的数组下标,我们要做的工作就是将保证这些下标不重复(如果重复的话,那就惨了),最初那种一维的计算方式就不行了。因此,通过使用threadIdx,blockDim来进行映射(偏移)。blockDim.x=8,blockDim.y=2,如上代码。
其实,我感觉有些我不能用文字准确、清晰的描述出来,所以咯,我们再来一个例子吧,我相信,多看一看,多想一想就明白了。
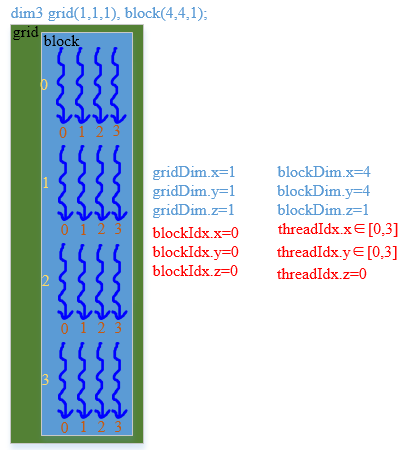
dim3 grid(1, 1, 1), block(4, 4, 1); // 设置参数
我们将block改成上面的这样,其线程模型为下图:
// 二:线程执行代码
__global__ void vector_add(float* vec1, float* vec2, float* vecres, int length) {int tid = threadIdx.y * blockDim.x + threadIdx.x; // 使用了threadIdx.x, threadIdx.x, blockDim.xif (tid < length) {vecres[tid] = vec1[tid] + vec2[tid];}
}
以上内容我们分别介绍了用一维和二维线程来计算一维数组的求和,实际上数组的维度与线程格、线程块和线程的维度并不是那么密不可分的,都可以组合实现,只不过在实现时,良好的参数配置对索引的计算很方便,而且由于grid、block、thread维度的限制,还有warpSize的限制,所以对于较大的数据量来说,我们应该做到心中有数,进行有效的块分解。
现在来看看二维的block,在整个文章中,我只讲解一维、二维的,因为三维的我不知道怎么画图啦,而且不好描述,免得误导大家。
还是上面的一维数组,长度为16。
dim3 grid(16, 1, 1), block(1, 1, 1); // 设置参数
先来个线程模型图,我想大家并不会感到惊讶,绿色的区域表示grid,蓝色的区域表示block,图中有一个grid和16个block,每个block都是一维,而且x维度上只有一个线程的:
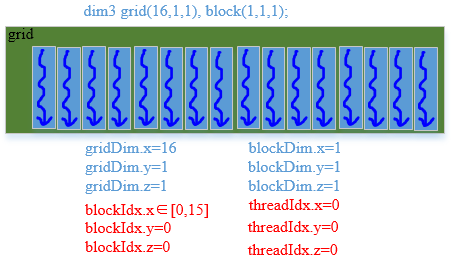
// 二:线程执行代码
__global__ void vector_add(float* vec1, float* vec2, float* vecres, int length) {int tid = blockIdx.x;if (tid < length) {vecres[tid] = vec1[tid] + vec2[tid];}
}
或许你会有疑惑,那么我们再来看一个:
dim3 grid(4, 1, 1), block(4, 1, 1);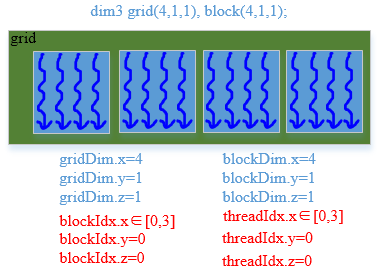
// 二:线程执行代码
__global__ void vector_add(float* vec1, float* vec2, float* vecres, int length) {int tid = blockIdx.x;if (tid < length) {vecres[tid] = vec1[tid] + vec2[tid];}
}
到现在为止,我觉得你应该有所领悟。如果还是不晓得的话,我想你应该认认真真的看图并动手分析了,图中的每一个块,每一个字都是有它的作用的,你不应该就此放弃。
我依然相信,能用图解决,就不哔哔。就好像你给一个人描述一座宫殿是多么多么的宏伟,富丽堂皇,他并不不会感冒。你就说,嘿大傻,给你瞧瞧我去欧洲玩的教堂,这是照片,不用多说,大傻自己就知道了。
比如,我描述说:
dim3 grid(4, 1, 1), block(4, 1, 1);
这样肯定不直观,那我再给你一幅示意图:
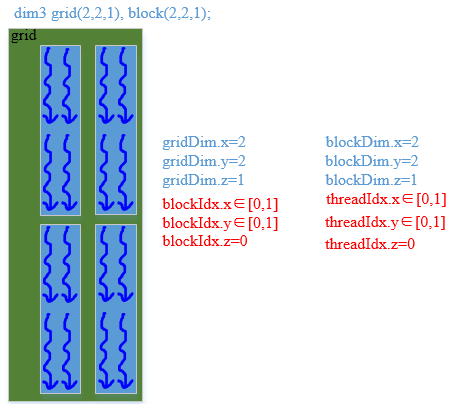
那么执行代码及索引计算如下:
// 二:线程执行代码
__global__ void vector_add(float* vec1, float* vec2, float* vecres, int length) {// 在第几个块中 * 块的大小 + 块中的x, y维度(几行几列)int tid = (blockIdx.y * gridDim.x + blockIdx.x) * (blockDim.x * blockDim.y) + threadIdx.y * blockDim.y + threadIdx.x;if (tid < length) {vecres[tid] = vec1[tid] + vec2[tid];}
}
上面的代码可能要复杂一点,但是你慢慢的会发现这很有趣。
到此,我想讲的就完了。当然对于二维的数组或是三维的数组,我想多看几个例子也就会有体会了。
这里还是忍不住要吐槽 一下內建变量threadIdx和blockIdx的命名了,每次看到这些內建变量其最后一个字母是x,就会给我一种误会是x维度上的
一下內建变量threadIdx和blockIdx的命名了,每次看到这些內建变量其最后一个字母是x,就会给我一种误会是x维度上的 ,我觉得使用threadId和blockId是多么的良好
,我觉得使用threadId和blockId是多么的良好 。当然,胜利的总是API一方,我也只能吐吐槽
。当然,胜利的总是API一方,我也只能吐吐槽 。
。
—————————————————————————————————————————————————————————————————————————————
最后再来一发,我给个图,我们来倒推其参数及相关执行代码,如下:
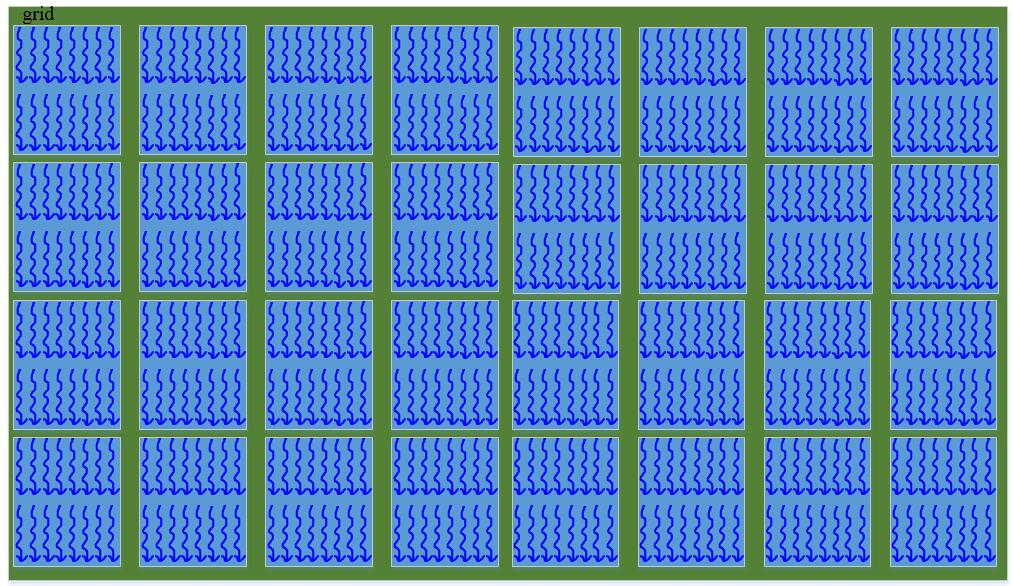
由于上传图片大小限制,由BMP转成JPG格式的了,有点不清晰,但足够看了。
显然参数为:
dim3 grid(8, 4, 1), block(8, 2, 1);
共有848*2=512个线程,当然在CUDA编程中,这算很少的了。如果是一幅512x512大小的图像做加或点乘之类的运算,随随便便就是几十万的线程数了。
万变不离其宗,其一维的计算方式如下:
__global__ void vector_add(float* vec1, float* vec2, float* vecres, int length) {// 在第几个块中 * 块的大小 + 块中的x, y维度(几行几列)int tid = (blockIdx.y * gridDim.x + blockIdx.x) * (blockDim.x * blockDim.y) + threadIdx.y * blockDim.y + threadIdx.x;if (tid < length) {vecres[tid] = vec1[tid] + vec2[tid];}
}
再给出二维的:
__global__ void vector_add(float** mat1, float** mat2, float** matres, int width) {int x = blockIdx.x * blockDim.x + threadIdx.x;int y = blockIdx.y * blockDim.y + threadIdx.y;if (x < width && y < width) {matres[x][y] = mat1[x][y] + mat2[x][y];}
}
这篇关于CUDA中线程索引计算方法的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




