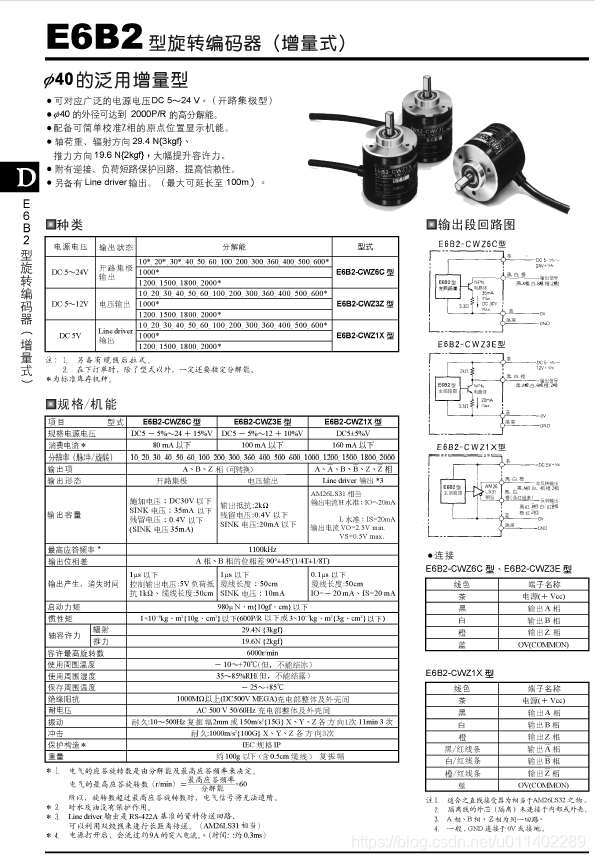
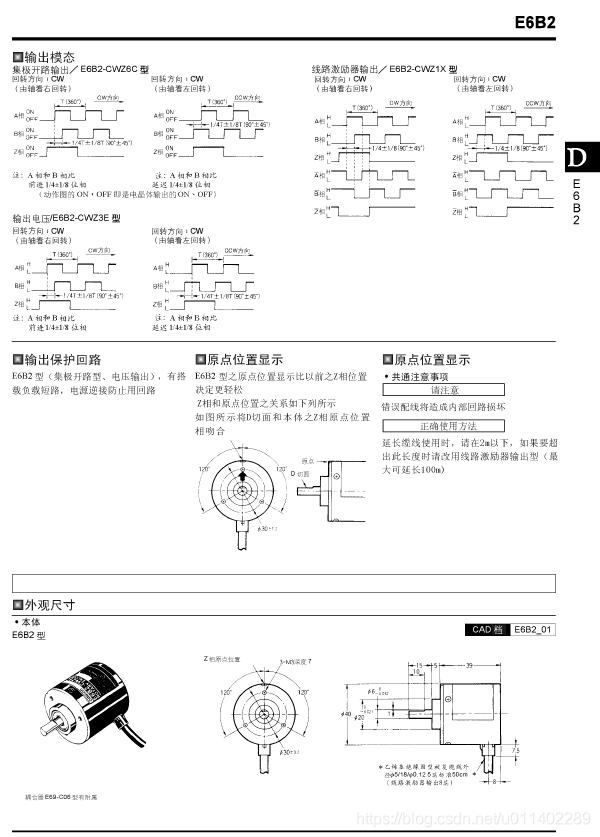
本文主要是介绍欧姆龙E6B2旋转编码器,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
你还在为安装自动化软件发愁吗?请加WX:HFTC7003
移动硬盘: 品牌东芝 1TB内存, 硬盘里面是操作系统不要删除,以免无法启动操作系统。 可以在硬盘里面单独建一个文件夹,存放资料。
本操作系统是win 7 64位 第一次使用注意事项: 1、把电脑的第一启动项设置成USB启动,不同电脑有不同方式,具体百度。 2、插入硬盘,打开电脑,等待加载,输入密码。 3、使用驱动精灵来匹配电脑驱动,更新完成后,和正常的电脑一模一样。 4、如果想使用原操作系统,USB孔不要插任何东西,直接启动即可。
独立的操作系统,省去安装过程。 免安装各种工业软件,即插即用。 不影响原电脑系统,随时切换。 提供大量视频教程,边学边用。 提供大量资料,做事不用求人。
这篇关于欧姆龙E6B2旋转编码器的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








