本文主要是介绍LLama2源码分析——Rotary Position Embedding分析,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
参考:一文看懂 LLaMA 中的旋转式位置编码(Rotary Position Embedding)
原理推导参考自上文,以下结合huggingface代码分析公式计算过程
1 旋转角度计算
计算公式如下,其中d为词嵌入维度,这部分和论文原文一样
θ j = 1000 0 − 2 ( j − 1 ) / d , j ∈ [ 1 , 2 , … , d / 2 ] \theta_j=10000^{-2(j-1)/d},j\in [1,2,\ldots,d/2] θj=10000−2(j−1)/d,j∈[1,2,…,d/2]
# 计算词向量元素两两分组之后,每组元素对应的旋转角度
# 维度:[dim / 2]
inv_freq = 1.0 / (self.base ** (torch.arange(0, self.dim, 2).float().to(device) / self.dim))
2 计算整个seq的cos_sin矩阵
def _set_cos_sin_cache(self, seq_len, device, dtype):self.max_seq_len_cached = seq_len# 生成token长度序列t = torch.arange(self.max_seq_len_cached, device=device, dtype=self.inv_freq.dtype)# 计算两个矩阵的外积,结果维度[seq_len, dim // 2]freqs = torch.einsum("i,j->ij", t, self.inv_freq)# 类似[[0, 2, 4, ..., 0, 2, 4, ...], ...]形式,旋转角度两两一组相同emb = torch.cat((freqs, freqs), dim=-1)self.register_buffer("cos_cached", emb.cos().to(dtype), persistent=False)self.register_buffer("sin_cached", emb.sin().to(dtype), persistent=False)
3 计算旋转式位置编码
f q ( x m , m ) = ( W q x m ) e i m θ f k ( x n , n ) = ( W k x n ) e i n θ \begin{aligned}f_q(x_m,m)&=(W_qx_m)e^{im\theta} \\f_k(x_n,n)&=(W_kx_n)e^{in\theta}\end{aligned} fq(xm,m)fk(xn,n)=(Wqxm)eimθ=(Wkxn)einθ
公式根据欧拉公式转化后为
( q m ( 1 ) + i q m ( 2 ) ) ∗ ( cos ( m θ ) + i sin ( m θ ) ) (q_{m}^{(1)}+iq_{m}^{(2)})*(\cos(m\theta)+i\sin(m\theta)) (qm(1)+iqm(2))∗(cos(mθ)+isin(mθ))
展开后将结果重新表示为实数向量即为
q m e i m θ = [ q m ( 1 ) cos ( m θ ) − q m ( 2 ) sin ( m θ ) , q m ( 2 ) cos ( m θ ) + q m ( 1 ) sin ( m θ ) ] q_me^{im\theta}=[q_m^{(1)}\cos(m\theta)-q_m^{(2)}\sin(m\theta),q_m^{(2)}\cos(m\theta)+q_m^{(1)}\sin(m\theta)] qmeimθ=[qm(1)cos(mθ)−qm(2)sin(mθ),qm(2)cos(mθ)+qm(1)sin(mθ)]
key的计算同理,以上公式是2维embedding的旋转编码计算,实际代码中是将高纬度的embedding两两分组按照上述公式计算,同一组内的旋转角度相同,此处Llama代码中的分组计算方式与论文原文有所区别,论文原文中是将embedding_dim维度(最后一维)的向量按照相邻两个位置数字为一组,可以按照如下代码理解
>>> a
tensor([[1, 2, 3, 4, 5, 6, 7, 8],[1, 2, 3, 4, 5, 6, 7, 8]])
>>> a.view(2, -1, 2)
tensor([[[1, 2],[3, 4],[5, 6],[7, 8]],[[1, 2],[3, 4],[5, 6],[7, 8]]])
因此,单个token的位置编码是如下图方式计算
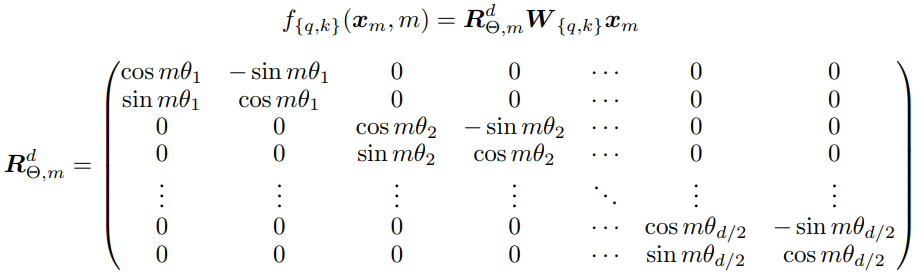
但以上的R矩阵比较稀疏,计算时浪费大量算力,因此Llama中采用不同的方式计算
- Llama源码中计算方法
( q 0 q 1 ⋮ q d / 2 − 1 q d / 2 q d / 2 + 1 ⋮ q d − 1 ) ⊗ ( cos m θ 0 cos m θ 2 cos m θ 4 ⋮ cos m θ d − 2 cos m θ 0 cos m θ 2 ⋮ cos m θ d − 2 ) + ( − q d / 2 − q d / 2 + 1 ⋮ − q d − 1 q 1 q 2 ⋮ q d / 2 − 1 ) ⊗ ( sin m θ 0 sin m θ 2 sin m θ 4 ⋮ sin m θ d − 2 sin m θ 0 sin m θ 2 ⋮ sin m θ d − 2 ) \begin{pmatrix} {q_0}\\{q_1}\\{\vdots}\\{q_{d/2-1}}\\{q_{d/2}}\\{q_{d/2+1}}\\{\vdots}\\{q_{d-1}} \end{pmatrix} \otimes \begin{pmatrix} \cos m\theta_0\\\cos m\theta_2\\\cos m\theta_4\\\vdots\\\cos m\theta_{d-2}\\\cos m\theta_0\\\cos m\theta_2\\\vdots\\\cos m\theta_{d-2} \end{pmatrix} + \begin{pmatrix} {-q_{d/2}}\\{-q_{d/2+1}}\\\vdots\\{-q_{d-1}}\\{q_{1}}\\{q_{2}}\\\vdots\\{q_{d/2-1}} \end{pmatrix} \otimes \begin{pmatrix} \sin m\theta_0\\\sin m\theta_2\\\sin m\theta_4\\\vdots\\\sin m\theta_{d-2}\\\sin m\theta_0\\\sin m\theta_2\\\vdots\\\sin m\theta_{d-2} \end{pmatrix} q0q1⋮qd/2−1qd/2qd/2+1⋮qd−1 ⊗ cosmθ0cosmθ2cosmθ4⋮cosmθd−2cosmθ0cosmθ2⋮cosmθd−2 + −qd/2−qd/2+1⋮−qd−1q1q2⋮qd/2−1 ⊗ sinmθ0sinmθ2sinmθ4⋮sinmθd−2sinmθ0sinmθ2⋮sinmθd−2
def rotate_half(x):"""Rotates half the hidden dims of the input."""x1 = x[..., : x.shape[-1] // 2]x2 = x[..., x.shape[-1] // 2 :]return torch.cat((-x2, x1), dim=-1)def apply_rotary_pos_emb(q, k, cos, sin, position_ids, unsqueeze_dim=1):cos = cos[position_ids].unsqueeze(unsqueeze_dim)sin = sin[position_ids].unsqueeze(unsqueeze_dim)q_embed = (q * cos) + (rotate_half(q) * sin)k_embed = (k * cos) + (rotate_half(k) * sin)return q_embed, k_embed
这篇关于LLama2源码分析——Rotary Position Embedding分析的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







