本文主要是介绍《linux 内核完全剖析》sched.c sched.h 代码分析笔记,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
sched.c sched.h 代码分析笔记
首先上header file
sched.h
#ifndef _SCHED_H
#define _SCHED_H#define HZ 100#define NR_TASKS 64
#define TASK_SIZE 0x04000000
#define LIBRARY_SIZE 0x00400000#if (TASK_SIZE & 0x3fffff)
#error "TASK_SIZE must be multiple of 4M"
#endif#if (LIBRARY_SIZE & 0x3fffff)
#error "LIBRARY_SIZE must be a multiple of 4M"
#endif#if (LIBRARY_SIZE >= (TASK_SIZE/2))
#error "LIBRARY_SIZE too damn big!"
#endif#if (((TASK_SIZE>>16)*NR_TASKS) != 0x10000)
#error "TASK_SIZE*NR_TASKS must be 4GB"
#endif#define LIBRARY_OFFSET (TASK_SIZE - LIBRARY_SIZE)#define CT_TO_SECS(x) ((x) / HZ)
#define CT_TO_USECS(x) (((x) % HZ) * 1000000/HZ)#define FIRST_TASK task[0]
#define LAST_TASK task[NR_TASKS-1]#include <linux/head.h>
#include <linux/fs.h>
#include <linux/mm.h>
#include <sys/param.h>
#include <sys/time.h>
#include <sys/resource.h>
#include <signal.h>#if (NR_OPEN > 32)
#error "Currently the close-on-exec-flags and select masks are in one long, max 32 files/proc"
#endif#define TASK_RUNNING 0
#define TASK_INTERRUPTIBLE 1
#define TASK_UNINTERRUPTIBLE 2
#define TASK_ZOMBIE 3
#define TASK_STOPPED 4#ifndef NULL
#define NULL ((void *) 0)
#endifextern int copy_page_tables(unsigned long from, unsigned long to, long size);
extern int free_page_tables(unsigned long from, unsigned long size);extern void sched_init(void);
extern void schedule(void);
extern void trap_init(void);
extern void panic(const char * str);
extern int tty_write(unsigned minor,char * buf,int count);typedef int (*fn_ptr)();struct i387_struct {long cwd;long swd;long twd;long fip;long fcs;long foo;long fos;long st_space[20]; /* 8*10 bytes for each FP-reg = 80 bytes */
};struct tss_struct {long back_link; /* 16 high bits zero */long esp0;long ss0; /* 16 high bits zero */long esp1;long ss1; /* 16 high bits zero */long esp2;long ss2; /* 16 high bits zero */long cr3;long eip;long eflags;long eax,ecx,edx,ebx;long esp;long ebp;long esi;long edi;long es; /* 16 high bits zero */long cs; /* 16 high bits zero */long ss; /* 16 high bits zero */long ds; /* 16 high bits zero */long fs; /* 16 high bits zero */long gs; /* 16 high bits zero */long ldt; /* 16 high bits zero */long trace_bitmap; /* bits: trace 0, bitmap 16-31 */struct i387_struct i387;
};struct task_struct {
/* these are hardcoded - don't touch */long state; /* -1 unrunnable, 0 runnable, >0 stopped */long counter;long priority;long signal;struct sigaction sigaction[32];long blocked; /* bitmap of masked signals */
/* various fields */int exit_code;unsigned long start_code,end_code,end_data,brk,start_stack;long pid,pgrp,session,leader;int groups[NGROUPS];/** pointers to parent process, youngest child, younger sibling,* older sibling, respectively. (p->father can be replaced with* p->p_pptr->pid)*/struct task_struct *p_pptr, *p_cptr, *p_ysptr, *p_osptr;unsigned short uid,euid,suid;unsigned short gid,egid,sgid;unsigned long timeout,alarm;long utime,stime,cutime,cstime,start_time;struct rlimit rlim[RLIM_NLIMITS];unsigned int flags; /* per process flags, defined below */unsigned short used_math;
/* file system info */int tty; /* -1 if no tty, so it must be signed */unsigned short umask;struct m_inode * pwd;struct m_inode * root;struct m_inode * executable;struct m_inode * library;unsigned long close_on_exec;struct file * filp[NR_OPEN];
/* ldt for this task 0 - zero 1 - cs 2 - ds&ss */struct desc_struct ldt[3];
/* tss for this task */struct tss_struct tss;
};/** Per process flags*/
#define PF_ALIGNWARN 0x00000001 /* Print alignment warning msgs *//* Not implemented yet, only for 486*//** INIT_TASK is used to set up the first task table, touch at* your own risk!. Base=0, limit=0x9ffff (=640kB)*/
#define INIT_TASK \
/* state etc */ { 0,15,15, \
/* signals */ 0,{{},},0, \
/* ec,brk... */ 0,0,0,0,0,0, \
/* pid etc.. */ 0,0,0,0, \
/* suppl grps*/ {NOGROUP,}, \
/* proc links*/ &init_task.task,0,0,0, \
/* uid etc */ 0,0,0,0,0,0, \
/* timeout */ 0,0,0,0,0,0,0, \
/* rlimits */ { {0x7fffffff, 0x7fffffff}, {0x7fffffff, 0x7fffffff}, \{0x7fffffff, 0x7fffffff}, {0x7fffffff, 0x7fffffff}, \{0x7fffffff, 0x7fffffff}, {0x7fffffff, 0x7fffffff}}, \
/* flags */ 0, \
/* math */ 0, \
/* fs info */ -1,0022,NULL,NULL,NULL,NULL,0, \
/* filp */ {NULL,}, \{ \{0,0}, \
/* ldt */ {0x9f,0xc0fa00}, \{0x9f,0xc0f200}, \}, \
/*tss*/ {0,PAGE_SIZE+(long)&init_task,0x10,0,0,0,0,(long)&pg_dir,\0,0,0,0,0,0,0,0, \0,0,0x17,0x17,0x17,0x17,0x17,0x17, \_LDT(0),0x80000000, \{} \}, \
}extern struct task_struct *task[NR_TASKS];
extern struct task_struct *last_task_used_math;
extern struct task_struct *current;
extern unsigned long volatile jiffies;
extern unsigned long startup_time;
extern int jiffies_offset;#define CURRENT_TIME (startup_time+(jiffies+jiffies_offset)/HZ)extern void add_timer(long jiffies, void (*fn)(void));
extern void sleep_on(struct task_struct ** p);
extern void interruptible_sleep_on(struct task_struct ** p);
extern void wake_up(struct task_struct ** p);
extern int in_group_p(gid_t grp);/** Entry into gdt where to find first TSS. 0-nul, 1-cs, 2-ds, 3-syscall* 4-TSS0, 5-LDT0, 6-TSS1 etc ...*/
#define FIRST_TSS_ENTRY 4
#define FIRST_LDT_ENTRY (FIRST_TSS_ENTRY+1)
#define _TSS(n) ((((unsigned long) n)<<4)+(FIRST_TSS_ENTRY<<3))
#define _LDT(n) ((((unsigned long) n)<<4)+(FIRST_LDT_ENTRY<<3))
#define ltr(n) __asm__("ltr %%ax"::"a" (_TSS(n)))
#define lldt(n) __asm__("lldt %%ax"::"a" (_LDT(n)))
#define str(n) \
__asm__("str %%ax\n\t" \"subl %2,%%eax\n\t" \"shrl $4,%%eax" \:"=a" (n) \:"a" (0),"i" (FIRST_TSS_ENTRY<<3))
/** switch_to(n) should switch tasks to task nr n, first* checking that n isn't the current task, in which case it does nothing.* This also clears the TS-flag if the task we switched to has used* tha math co-processor latest.*/
#define switch_to(n) {\
struct {long a,b;} __tmp; \
__asm__("cmpl %%ecx,_current\n\t" \"je 1f\n\t" \"movw %%dx,%1\n\t" \"xchgl %%ecx,_current\n\t" \"ljmp %0\n\t" \"cmpl %%ecx,_last_task_used_math\n\t" \"jne 1f\n\t" \"clts\n" \"1:" \::"m" (*&__tmp.a),"m" (*&__tmp.b), \"d" (_TSS(n)),"c" ((long) task[n])); \
}#define PAGE_ALIGN(n) (((n)+0xfff)&0xfffff000)#define _set_base(addr,base) \
__asm__("movw %%dx,%0\n\t" \"rorl $16,%%edx\n\t" \"movb %%dl,%1\n\t" \"movb %%dh,%2" \::"m" (*((addr)+2)), \"m" (*((addr)+4)), \"m" (*((addr)+7)), \"d" (base) \:"dx")#define _set_limit(addr,limit) \
__asm__("movw %%dx,%0\n\t" \"rorl $16,%%edx\n\t" \"movb %1,%%dh\n\t" \"andb $0xf0,%%dh\n\t" \"orb %%dh,%%dl\n\t" \"movb %%dl,%1" \::"m" (*(addr)), \"m" (*((addr)+6)), \"d" (limit) \:"dx")#define set_base(ldt,base) _set_base( ((char *)&(ldt)) , base )
#define set_limit(ldt,limit) _set_limit( ((char *)&(ldt)) , (limit-1)>>12 )#define _get_base(addr) ({\
unsigned long __base; \
__asm__("movb %3,%%dh\n\t" \"movb %2,%%dl\n\t" \"shll $16,%%edx\n\t" \"movw %1,%%dx" \:"=d" (__base) \:"m" (*((addr)+2)), \"m" (*((addr)+4)), \"m" (*((addr)+7))); \
__base;})#define get_base(ldt) _get_base( ((char *)&(ldt)) )#define get_limit(segment) ({ \
unsigned long __limit; \
__asm__("lsll %1,%0\n\tincl %0":"=r" (__limit):"r" (segment)); \
__limit;})#endif
对于_TSS 和 _LDT两个宏定义
#define FIRST_TSS_ENTRY 4
#define FIRST_LDT_ENTRY (FIRST_TSS_ENTRY+1)
#define _TSS(n) ((((unsigned long) n)<<4)+(FIRST_TSS_ENTRY<<3))
#define _LDT(n) ((((unsigned long) n)<<4)+(FIRST_LDT_ENTRY<<3))
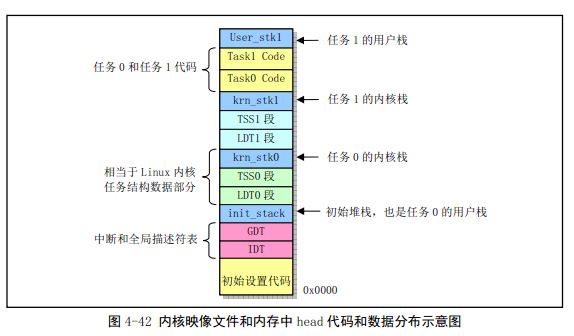
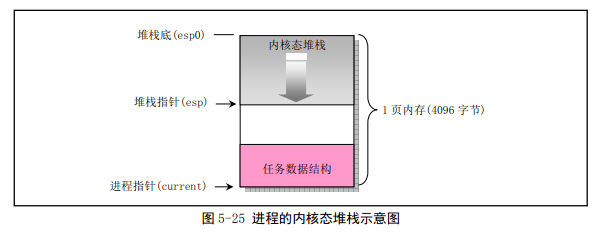
每个任务都有两个堆栈,分别用于用户态和内核态程序的执行,并且分别称为用户态堆栈和内核态堆栈。处于不同的CPU特权级中,这两个堆栈之间的主要区别在于任务的内核态堆栈很小,所保存的数量最多不能超过4096-任务数据结构块个字节,大约为3K,而任务的用户态堆栈却可以在用户的64M空间内延伸。
show_task
void show_task(int nr,struct task_struct * p)//显示p指向的nr号进程的相关信息
{int i,j = 4096-sizeof(struct task_struct);//j记录了任务数据结构之后的堆栈空间大小printk("%d: pid=%d, state=%d, father=%d, child=%d, ",nr,p->pid,p->state, p->p_pptr->pid, p->p_cptr ? p->p_cptr->pid : -1);//打印关于p指向进程的各种信息i=0;while (i<j && !((char *)(p+1))[i])//很巧妙的计算了任务数据结构之后的空字节(数据内容为0)的大小i++;printk("%d/%d chars free in kstack\n\r",i,j);//内核栈最大为j,空字节数是i,分数比率i/jprintk(" PC=%08X.", *(1019 + (unsigned long *) p));//p指向结构体起始地址偏移1019,应该是指数据结构中的TSS结构内EIP处的值(所谓PC指针),eip的值即当前任务用户态的代码指针。if (p->p_ysptr || p->p_osptr) //如果p进程有同辈的进程,那么打印它们的进程号printk(" Younger sib=%d, older sib=%d\n\r",p->p_ysptr ? p->p_ysptr->pid : -1,p->p_osptr ? p->p_osptr->pid : -1);elseprintk("\n\r");
}http://www.oldlinux.org/oldlinux/viewthread.php?tid=12182
http://www.oldlinux.org/oldlinux/viewthread.php?tid=14683
show_task
//调用show_task,打印所有非空进程的信息
void show_state(void)
{int i;printk("\rTask-info:\n\r");for (i=0;i<NR_TASKS;i++)if (task[i])//扫描task数组,非空即打印对应task[i]进程相关信息show_task(i,task[i]);
}
在内核中的调度程序用于选择系统中下一个要运行的进程。这种选择运行机制是多任务操作系统的基础。调度程序可以看作为处于运行状态都进程之间分配CPU运行时间的管理代码。Linux进程是抢占式的,但被抢占的进程仍处于TASK_RUNNING状态,只是暂时没有被CPU运行。进程的抢占发生在进程处于用于态执行阶段,在内核态执行时是不能被强制的。(0.12的不可以,貌似现在的可以了)
schdule()函数首先扫描任务数组,通过比较每个就绪状态任务的运行时间递减滴答计数counter的值来确定当前哪个进程运行的时间最少,哪个counter值最大,就表示运行时间还不长,于是就选中该进程,并使用任务切换宏函数到该进程运行。
schedule()
void schedule(void)
{int i,next,c;struct task_struct ** p;/* check alarm, wake up any interruptible tasks that have got a signal */for(p = &LAST_TASK ; p > &FIRST_TASK ; --p)//把p初始化为指向最后一个进程的地址的指针,逆向扫描所有进程if (*p) {//*p 指向当前进程的指针if ((*p)->timeout && (*p)->timeout < jiffies) {//这里< 没错,我一直很纠结为什么不是> 这里jiffies是渐变的,持续变的,而timeout 只是作为一个阈值(*p)->timeout = 0;//如果当前进程等待很久了((*p)->timeout < jiffies),并且这个进程处于TASK_INTERRUPTIBLE//我们就把这个进程置与TASK_RUNNING状态if ((*p)->state == TASK_INTERRUPTIBLE)(*p)->state = TASK_RUNNING;}if ((*p)->alarm && (*p)->alarm < jiffies) { //如果此时jiffies大于alarm信号周期,则让将SIGALRM写入进程的信号位(*p)->signal |= (1<<(SIGALRM-1));(*p)->alarm = 0;}if (((*p)->signal & ~(_BLOCKABLE & (*p)->blocked)) &&(*p)->state==TASK_INTERRUPTIBLE)// 除SIGKILL SIGSTOP信号外,其他信号都是非阻塞状态的话,并且进程处于TASK_INTERRUPTIBLE(*p)->state=TASK_RUNNING;//我们就把这个进程置与TASK_RUNNING状态}/* this is the scheduler proper: */while (1) {c = -1;next = 0;i = NR_TASKS;p = &task[NR_TASKS];while (--i) {//把所有进程都扫一遍,counter是递减的,找出counter最大的进程,保存在next里面if (!*--p)//当前*p指向进程为空,下一个continue;if ((*p)->state == TASK_RUNNING && (*p)->counter > c)//counter是任务运行时间计数,注意处于scheduled状态的进程也是在运行是,只是没有使用CPU而已c = (*p)->counter, next = i;}if (c) break;//c>0 就说明找到了已经运行一段时间,并且运行时间最短的进程,跳出while(1)for(p = &LAST_TASK ; p > &FIRST_TASK ; --p)//如果c==0,说明所有schedule的进程都没有运行 if (*p)(*p)->counter = ((*p)->counter >> 1) +(*p)->priority; //重新计算counter = counter/2 + priority}switch_to(next);//让进程next使用CPU
}
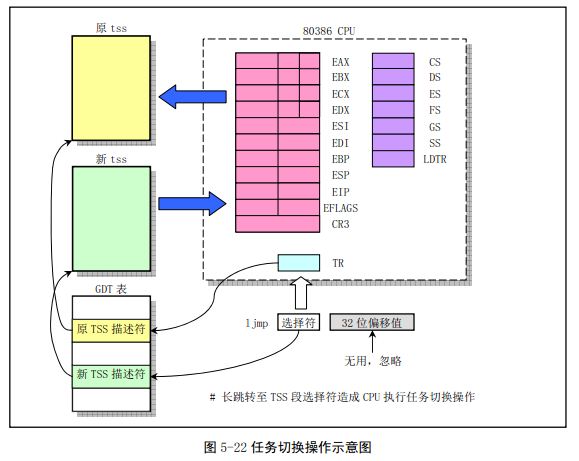
每当选择出一个新的可以运行的进程时,switch_to()宏执行实际进程切换操作。该宏会把CPU的当前进程状态(context)切换成新进程的状态。
在切换之前,switch_to首先检查要切换的进程是否就是当前进程。如果是,啥也别做,直接退出。如果不是,就把内核全局变量current置为新任务的指针。然后ljmp 长跳转到新任务的状态段TSS组成的地址处,造成CPU执行任务切换操作。此时,CPU会把其所有寄存器的状态保存到当前任务寄存器TR中TSS段选择所指向的当前进程任务数据结构,然后把新任务状态段选择符所指向的新任务数据结构tss结构中的寄存器恢复到CPU中,系统正式开始运行新切换的任务。
switch_to
#define switch_to(n) {\
struct {long a,b;} __tmp; \
__asm__("cmpl %%ecx,_current\n\t" \ //进程n是当前current进程,直接结束switch,否则继续je之后的内容"je 1f\n\t" \"movw %%dx,%1\n\t" \ //将新任务的TSS的16选择符号存入 _tmp.b 中"xchgl %%ecx,_current\n\t" \ //交换ecx 和current的值,这个时候current就是next指向的进程了!"ljmp %0\n\t" \ // long jump 把控制流跳转到 %0 _tmp 处 这个long jump比较“特别”,一句两句注释说不清楚,//可能看到这里会疑惑都跳转了,下面的语句还有什么用?有用!因为会“跳回来”"cmpl %%ecx,_last_task_used_math\n\t" \ // 原任务是否使用过协处理器"jne 1f\n\t" \//没用过,跳到l,结束"clts\n" \//用过,清理"1:" \ //切换TS标识::"m" (*&__tmp.a),"m" (*&__tmp.b), \"d" (_TSS(n)),"c" ((long) task[n])); \
}为什么会执行这句话
cmpl %%ecx,_last_task_used_math既然任务切换时CPU会恢复寄存器现场,那么它当然也会保存寄存器现场了。这些寄存器现场都会被写入原任务的tss结构里,值得注意的是,EIP会指向引起任务切换指令ljmp的下一条指令cmpl,所以,很明显,当原任务有朝一日再次被调度运行时,它将从EIP所指的地方,而这个地方恰巧是cmpl !
比较有用的一个帖子:
http://www.oldlinux.org/oldlinux/archiver/?tid-5390.html
sys_pause
int sys_pause(void) //把当前进程转换成可中断的等待状态,并重新调度
{current->state = TASK_INTERRUPTIBLE;schedule();return 0;
}
__sleep_on
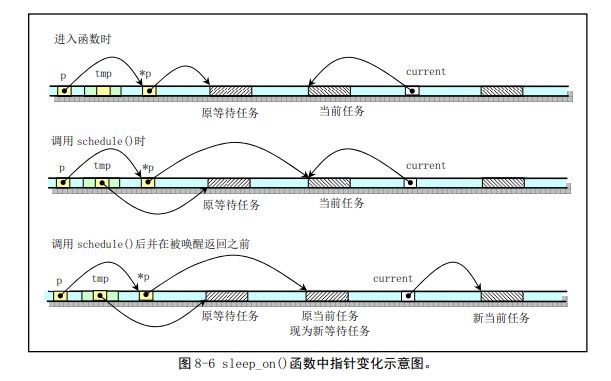
static inline void __sleep_on(struct task_struct **p, int state)
//看的时候一定要记住,这个_sleep_on 的作用就是把当前进程正等待资源响应或者不在内存时先让他schedule一下,
//让别的程序先运行一段时间的,
//等到自己等待的资源响应之后,这个时候才跳过if判断,执行后面的语句
{struct task_struct *tmp;if (!p)//常规检查p 为0的时候直接返回return;if (current == &(init_task.task)) //如果当前进程是panic("task[0] trying to sleep");tmp = *p;// tmp 指向原等待队列的头指针*p = current; //*p 指向等待队列的头指针,把current放入等待队列current->state = state;
repeat: schedule();if (*p && *p != current) {//如果*p是 等待队列的头指针,不进入,否则goto一直重复schedule,直到当前current进程是*p(**p).state = 0;current->state = TASK_UNINTERRUPTIBLE;goto repeat;}if (!*p)printk("Warning: *P = NULL\n\r");if (*p = tmp) // 恢复原来的等待队列,*p 指向原来的等待队列头,逐出current进程tmp->state=0; //TASK_RUNNING
}
interruptible_sleep_on
void interruptible_sleep_on(struct task_struct **p) //可中断睡眠
{__sleep_on(p,TASK_INTERRUPTIBLE);
}sleep_on
void sleep_on(struct task_struct **p)//不可中断睡眠
{__sleep_on(p,TASK_UNINTERRUPTIBLE);
}
wake_up
void wake_up(struct task_struct **p)//唤醒进程
{if (p && *p) {if ((**p).state == TASK_STOPPED)printk("wake_up: TASK_STOPPED");if ((**p).state == TASK_ZOMBIE)printk("wake_up: TASK_ZOMBIE");(**p).state=0; //TASK_RUNNING}
}
get_pid,getppid,getuid,geteuid,getgid,sys_nice
int sys_getpid(void) //各种系统调用查看进程相关信息
{return current->pid;
}int sys_getppid(void)
{return current->p_pptr->pid;
}int sys_getuid(void)
{return current->uid;
}int sys_geteuid(void)
{return current->euid;
}int sys_getgid(void)
{return current->gid;
}int sys_getegid(void)
{return current->egid;
}int sys_nice(long increment)
{if(current->priority-increment>0)current->priority -=increment;return 0;}
sched_init
void sched_init(void)//schedule 的初始化 被main.c 调用,真心之只能大概看懂,很多初始化设置不知道为什么
{int i;struct desc_struct * p;if (sizeof(struct sigaction) !=16)panic("Struct sigactionMUST be 16 bytes");set_tss_desc(gdt+FIRST_TSS_ENTRY,&(init_task.task.tss));set_ldt_desc(gdt+FIRST_LDT_ENTRY,&(init_task.task.ldt));p = gdt+2+FIRST_TSS_ENTRY;for(i=1;i<NR_TASKS;i++) {//从1开始,跳过了进程init,保护好刚已经设置好的init_task//任务清零,描述符清零task[i] = NULL;p->a=p->b=0; //偏址清零p++;p->a=p->b=0; //TSS 清零p++;}
/* Clear NT, so that we won't have troubles with that later on */ //从这里我就不知道发生鸟神马。。。T-T__asm__("pushfl ; andl$0xffffbfff,(%esp) ; popfl");ltr(0);lldt(0);outb_p(0x36,0x43); /* binary, mode 3, LSB/MSB, ch 0 */outb_p(LATCH & 0xff , 0x40); /* LSB */outb(LATCH >> 8 , 0x40); /* MSB */set_intr_gate(0x20,&timer_interrupt);outb(inb_p(0x21)&~0x01,0x21);set_system_gate(0x80,&system_call);
}

这篇关于《linux 内核完全剖析》sched.c sched.h 代码分析笔记的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





