本文主要是介绍SVO 论文与代码分析总结,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
概述
欢迎访问 https://cgabc.xyz/posts/6224da90/,持续更新
SVO: Semi-direct Monocular Visual Odometry
- 论文: SVO: Fast Semi-Direct Monocular Visual Odometry
- 代码(注释版):cggos/svo_cg
SVO结合了直接法和特征点法,称为 半直接单目视觉里程计。
初始化
获取第一关键帧和第二关键帧的相对位姿,并建立初始地图,代码主要在 initialization.cpp 中。
(1)处理第一帧 FrameHandlerMono::processFirstFrame
- 第一帧位姿为单位阵
new_frame_->T_f_w_ = SE3(Matrix3d::Identity(), Vector3d::Zero()) addFirstFramedetectFeatures: 获取 Shi-Tomas得分较高 且 均匀分布 的 FAST角点,并创建Features- 初始化
px_vec(Coordinates in pixels on pyramid level 0) 和f_vec(Unit-bearing vector of the feature)
- 将当前帧设置为关键帧,并检测5个对应的关键点
- 添加关键帧到地图
map_.addKeyframe(new_frame_);
(2)处理第二帧 FrameHandlerMono::processSecondFrame
addSecondFrame- 光流跟踪
trackKlt - 计算 单应性矩阵(假设局部平面场景),估计相对位姿
T_cur_from_ref_ - 创建初始地图
- 光流跟踪
- BA优化
ba::twoViewBA - 添加关键帧到地图
map_.addKeyframe(new_frame_); - 添加关键帧到深度滤波器
depth_filter_->addKeyframe
位姿估计
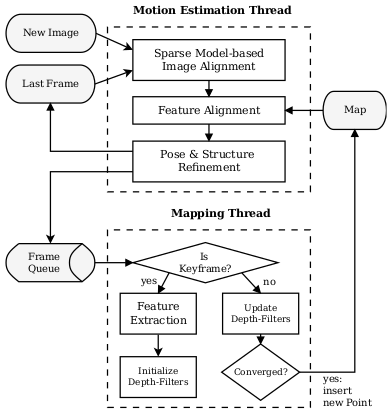
代码主框架在 FrameHandlerMono::processFrame()。
稀疏图像对齐(直接法)
代码主要在 SparseImgAlign。

使用 稀疏直接法 计算两帧之间的初始相机位姿T_cur_from_ref:根据last_frame_的特征点 和 last_frame_与new_frame_的相对位姿,建立损失函数(两帧之间稀疏的4x4的patch的光度误差)SparseImgAlign::computeResiduals,使用G-N优化算法获得两帧之间的位姿变换,没有特征匹配过程,效率较高。
T k , k − 1 = arg min T k , k − 1 1 2 ∑ i ∥ δ I ( T k , k − 1 , u i ) ∥ 2 T_{k,k-1} = \arg \min_{T_{k,k-1}} \frac{1}{2} \sum_{i} \| \delta I(T_{k,k-1}, u_i) \|^2 Tk,k−1=argTk,k−1min21i∑∥δI(Tk,k−1,ui)∥2
其中,
δ I ( T , u ) = I k ( π ( T ⋅ π − 1 ( u , d u ) ) ) − I k − 1 ( u ) \delta I(T, u) = I_k(\pi(T \cdot {\pi}^{-1} (u,d_u))) - I_{k-1}(u) δI(T,u)=Ik(π(T⋅π−1(u,du)))−Ik−1(u)
- patch选取了4x4的大小,忽略patch的变形,并且没有做仿射变换(affine warp),加快了计算速度
- 在几个图像金字塔层之间迭代优化,从金字塔的最顶层(默认是第五层
klt_max_level)逐层计算(默认计算到第3层klt_min_level) - 广泛使用指针,比直接取值速度更快
- 逆向组合(inverse compositional)算法,预先计算雅克比矩阵
precomputeReferencePatches,节省计算量 - 几处双线性插值方法对提高精度有帮助
最后,cur_frame_->T_f_w_ = T_cur_from_ref * ref_frame_->T_f_w_;
特征对齐(光流法)
代码入口在 Reprojector::reprojectMap。

通过上一步的帧间匹配能够得到当前帧相机的位姿,但是这种frame to frame估计位姿的方式不可避免的会带来累计误差从而导致漂移。
稀疏图像对齐之后使用 特征对齐,即通过地图向当前帧投影,并使用 逆向组合光流 以稀疏图像对齐的结果为初始值,完成基于patch的特征匹配,得到更精确的特征位置。
基于 光度不变性假设,特征块在以前参考帧中的亮度应该和new frame中的亮度差不多,所以重新构造一个残差,对特征预测位置进行优化(代码主要在 Matcher::findMatchDirect):
u i ′ = arg min u i ′ 1 2 ∥ I k ( u i ′ ) − A i ⋅ I r ( u i ) ∥ 2 u_i' = \arg \min_{u_i'} \frac{1}{2} \| I_k(u_i') - A_i \cdot I_r(u_i) \|^2 ui′=argui′min21∥Ik(ui′)−Ai⋅Ir(ui)∥2
- 优化变量是 像素位置
- 光度误差的前一部分是当前图像中的亮度值;后一部分不是 I k − 1 I_{k-1} Ik−1 而是 I r I_r Ir,即它是根据投影的3D点追溯到其所在的KF中的像素值
- 选取了8x8的patch,由于是特征块对比并且3D点所在的KF可能离当前帧new frame比较远,所以光度误差还加了一个仿射变换 A i A_i Ai,可以得到亚像素级别的精度
- 对于每个特征点单独考虑,找到和当前帧视角最接近的共视关键帧
getCloseViewObs(这个关键帧和当前帧的视角差别越小,patch的形变越小,越可以更精准地匹配)
该过程通过 inverse compositional Lucas-Kanade algorithm 求解,得到优化后更加准确的特征点预测位置。
位姿和结构优化(特征点法)
代码主要在 pose_optimizer::optimizeGaussNewton 和 FrameHandlerBase::optimizeStructure

motion-only BA
T k , w = arg min T k , w 1 2 ∑ i ∥ u i − π ( T k , w ⋅ p i ) ∥ 2 T_{k,w} = \arg \min_{T_{k,w}} \frac{1}{2} \sum_{i} \| u_i - \pi(T_{k,w} \cdot p_i) \|^2 Tk,w=argTk,wmin21i∑∥ui−π(Tk,w⋅pi)∥2
- 优化变量是 相机位姿
structure-only BA
- 优化变量是 三维点坐标
local BA
- 附近关键帧和可见的地图点都被优化了,这一小步在fast模式下是不做的
重定位
代码主要在 FrameHandlerMono::relocalizeFrame。
重定位效果一般,有待改进。
建图(深度滤波器)

SVO把像素的深度误差模型看做概率分布,使用 高斯——均匀混合分布的逆深度(深度值服从高斯分布,局外点的概率服从Beta分布),称为 深度滤波器Depth Filter,每个特征点作为 种子Seed(深度未收敛的像素点)有一个单独的深度滤波器。
- 初始化种子:如果进来一个 关键帧,就提取关键帧上的新特征点,初始化深度滤波器,作为种子点放进一个种子队列中
- 更新种子:如果进来一个 普通帧,就用普通帧的信息,更新所有种子点的概率分布;如果某个种子点的深度分布已经收敛,就把它放到地图中,供追踪线程使用
初始化种子
代码主要在 DepthFilter::initializeSeeds。
- 当前帧上已经有的特征点,占据住网格
- 多层金字塔FAST特征检测并进行非极大值抑制,映射到第0层网格,每个网格保留Shi-Tomas分数最大的点
- 对于所有的新的特征点,初始化成种子点Seed
- 高斯分布均值:
mu = 1.0/depth_mean - 高斯分布方差:
sigma2 = z_range*z_range/36,其中z_range = 1.0/depth_min
- 高斯分布均值:
更新种子(深度滤波)
深度滤波 DepthFilter::updateSeeds 主要过程:
- 极线搜索与三角测量
Matcher::findEpipolarMatchDirect - 计算深度不确定度
DepthFilter::computeTau - 深度融合,更新种子
DepthFilter::updateSeed - 初始化新的地图点,移除种子点
深度估计值(极线搜索)
- 根据 深度均值
mu和深度方差sigma2确定深度范围 [ d m i n , d m a x ] [d_{min},d_{max}] [dmin,dmax],计算极线 - 计算仿射矩阵
warp::getWarpMatrixAffine(帧间图像发生旋转) - 极线上搜索匹配:通过RANSAC计算ZMSSD获取最佳匹配点坐标
- 当计算的极线长度小于两个像素时,直接采用下一步的图像对齐
- 否则,继续沿极线搜索匹配
- 光流法亚像素精度提取(图像对齐)
feature_alignment::align2D - 三角法恢复深度Z
depthFromTriangulation(Triangulate in SVO)
深度估计不确定度
REMODE 对由于特征定位不准导致的三角化深度误差进行了分析

假设 焦距为 f f f,像素扰动为 px_noise = 1.0,角度变化量 px_error_angle 为 δ β \delta \beta δβ 则
tan δ β 2 = 1.0 2 f \tan \frac{\delta \beta}{2} = \frac{1.0}{2f} tan2δβ=2f1.0
得
δ β = 2 arctan 1.0 2 f \delta \beta = 2 \arctan \frac{1.0}{2f} δβ=2arctan2f1.0
则
β + = β + δ β \beta^{+} = \beta + \delta \beta β+=β+δβ
γ + = π − α − β + \gamma^{+} = \pi - \alpha - \beta^{+} γ+=π−α−β+
已知 t t t 为 T_ref_cur.translation(),根据正弦定理
Z + = ∥ t ∥ sin β + sin γ + Z^{+} = \|t\| \frac{\sin \beta^{+}}{\sin \gamma^{+}} Z+=∥t∥sinγ+sinβ+
所以,深度不确定度 tau 为 τ = Z + − Z \tau = Z^{+} - Z τ=Z+−Z
逆深度不确定度 tau_inverse 为:
double tau_inverse = 0.5 * (1.0/max(0.0000001, z-tau) - 1.0/(z+tau));
即 逆深度标准差 为
τ i n v = 1 2 ( 1 Z − τ − 1 Z + τ ) \tau_{inv} = \frac{1}{2} (\frac{1}{Z-\tau} - \frac{1}{Z+\tau}) τinv=21(Z−τ1−Z+τ1)
深度融合
代码主要在 void DepthFilter::updateSeed(const float x, const float tau2, Seed* seed)。
SVO的融合是不断利用最新时刻深度的观测值,来融合上一时刻深度最优值,直至深度收敛。
通过上面两步得到 逆深度测量值 x x x 1./z 和 逆深度不确定度 τ i n v \tau_{inv} τinv,则 逆深度 服从 高斯分布
N ( x , τ i n v 2 ) N(x, \tau_{inv}^2) N(x,τinv2)
SVO 采用 Vogiatzis的论文 Video-based, real-time multi-view stereo 提到的概率模型,使用 高斯–均匀混合分布的深度滤波器,根据 x x x 和 τ i n v \tau_{inv} τinv 更新以下四个参数:
- 逆深度高斯分布的均值 μ \mu μ
seed->mu - 逆深度高斯分布的方差 σ 2 \sigma^2 σ2
seed->sigma2 - Beta分布的 a a a
seed->a - Beta分布的 b b b
seed->b
更新过程(Vogiatzis的Supplementary matterial)如下:
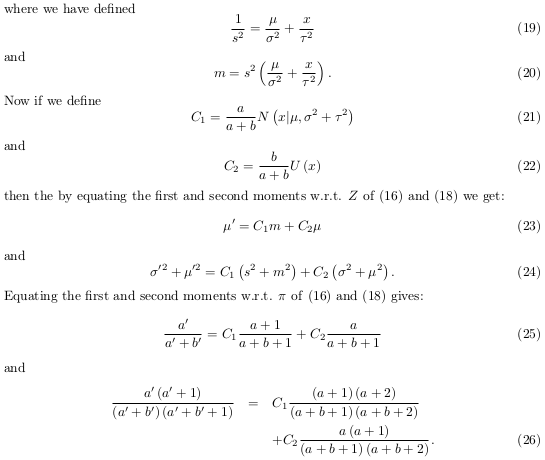
其中,论文公式19有误(代码正确),应为
1 s 2 = 1 σ 2 + 1 τ i n v 2 \frac{1}{s^2} = \frac{1}{\sigma^2} + \frac{1}{\tau_{inv}^2} s21=σ21+τinv21
最终,得到收敛的逆深度的最佳估计值 seed->mu。
新的地图点
如果种子点的方差seed->sigma2,小于深度范围/200的时候,就认为收敛了,它就不再是种子点,而是TYPE_CANDIDATE点。
TYPE_CANDIDATE点被成功观察到1次,就变成TYPE_UNKNOWN点;TYPE_UNKNOWN被成功观察到10次,就变成TYPE_GOOD点;如果多次应该观察而没有被观察到,就变成TYPE_DELETED点。
总结与讨论
- 特征点提取在地图线程,跟踪使用光流法
- 后端的特征点只在关键帧上提取,用FAST加金字塔
- 上一个关键帧的特征点在这一个关键帧上找匹配点的方法,是用极线搜索,寻找亮度差最小的点,最后再用深度滤波器把这个地图点准确地滤出来
- 重定位比较简单,没有回环
- 深度滤波器使用的是高斯–均匀混合分布
- SVO对PTAM的改进主要在两个方面:高效的特征匹配、鲁棒的深度滤波器
- 在Tracking线程,当前帧的特征点是从上一帧用光流法传递过来的,只有在Mapping线程
DepthFilter插入新关键帧时才需要提取特征点,不需要每一帧都提取特征点 - PTAM和ORB-SLAM只用两帧图像三角化出地图点,只要地图点没有被判定为外点,就固定不变了(除非BA阶段调整);而SVO的深度滤波器会根据多帧图片不断收敛地图点的不确定度,从而得到更可靠的地图点。因为地图点更可靠,所以SVO只需要维护更少的地图点(PTAM一般维护约160到220个特征点,SVO在fast模式下维护约120个地图点),从而加快了计算速度。
参考文献
- SVO: Fast Semi-Direct Monocular Visual Odometry
- ivcj2010supp, Supplementary matterial
- REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time
- SVO 代码笔记
- svo: semi-direct visual odometry 论文解析
- 能否具体解释下svo的运动估计与深度估计两方面?
- SVO原理解析
- svo的Supplementary matterial 推导过程
- 深度滤波器详细解读
这篇关于SVO 论文与代码分析总结的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




