本文主要是介绍C# yolov8 TensorRT +ByteTrack Demo,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
C# yolov8 TensorRT +ByteTrack Demo

目录
效果
说明
项目
代码
Form2.cs
YoloV8.cs
ByteTracker.cs
下载
参考
效果
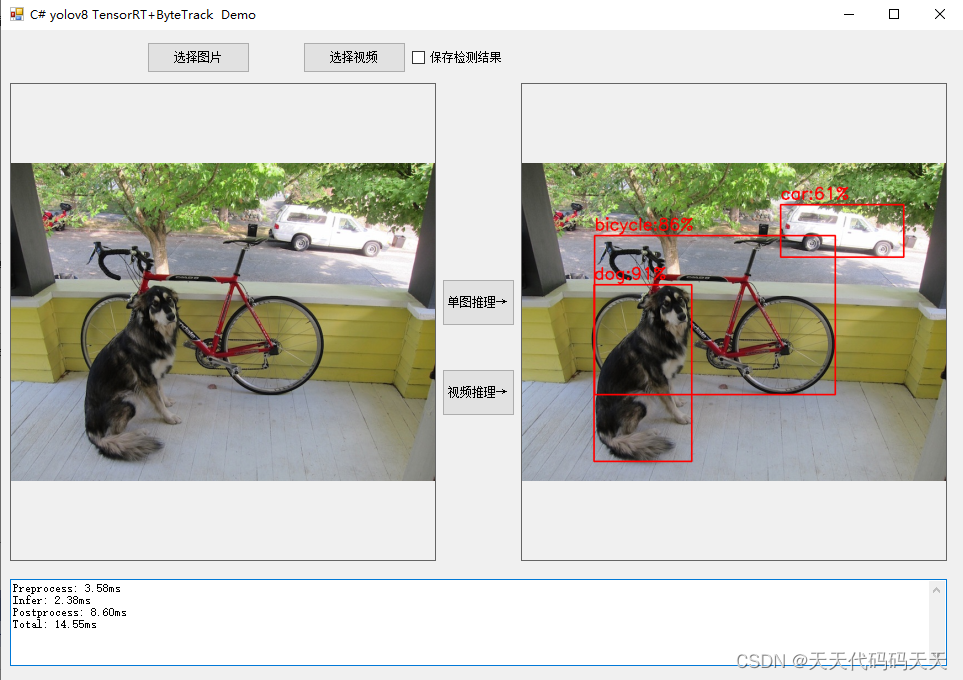
说明
环境
NVIDIA GeForce RTX 4060 Laptop GPU
cuda12.1+cudnn 8.8.1+TensorRT-8.6.1.6
版本和我不一致的需要重新编译TensorRtExtern.dll,TensorRtExtern源码地址:TensorRT-CSharp-API/src/TensorRtExtern at TensorRtSharp2.0 · guojin-yan/TensorRT-CSharp-API · GitHub
Windows版 CUDA安装参考:Windows版 CUDA安装_win cuda安装-CSDN博客
项目
代码
Form2.cs
using ByteTrack;
using OpenCvSharp;
using System;
using System.Collections.Generic;
using System.Diagnostics;
using System.Drawing;
using System.IO;
using System.Threading;
using System.Windows.Forms;
using TensorRtSharp.Custom;
namespace yolov8_TensorRT_Demo
{
public partial class Form2 : Form
{
public Form2()
{
InitializeComponent();
}
string imgFilter = "*.*|*.bmp;*.jpg;*.jpeg;*.tiff;*.tiff;*.png";
YoloV8 yoloV8;
Mat image;
string image_path = "";
string model_path;
string video_path = "";
string videoFilter = "*.mp4|*.mp4;";
VideoCapture vcapture;
VideoWriter vwriter;
bool saveDetVideo = false;
ByteTracker tracker;
/// <summary>
/// 单图推理
/// </summary>
/// <param name="sender"></param>
/// <param name="e"></param>
private void button2_Click(object sender, EventArgs e)
{
if (image_path == "")
{
return;
}
button2.Enabled = false;
pictureBox2.Image = null;
textBox1.Text = "";
Application.DoEvents();
image = new Mat(image_path);
List<DetectionResult> detResults = yoloV8.Detect(image);
//绘制结果
Mat result_image = image.Clone();
foreach (DetectionResult r in detResults)
{
Cv2.PutText(result_image, $"{r.Class}:{r.Confidence:P0}", new OpenCvSharp.Point(r.Rect.TopLeft.X, r.Rect.TopLeft.Y - 10), HersheyFonts.HersheySimplex, 1, Scalar.Red, 2);
Cv2.Rectangle(result_image, r.Rect, Scalar.Red, thickness: 2);
}
if (pictureBox2.Image != null)
{
pictureBox2.Image.Dispose();
}
pictureBox2.Image = new Bitmap(result_image.ToMemoryStream());
textBox1.Text = yoloV8.DetectTime();
button2.Enabled = true;
}
/// <summary>
/// 窗体加载,初始化
/// </summary>
/// <param name="sender"></param>
/// <param name="e"></param>
private void Form1_Load(object sender, EventArgs e)
{
image_path = "test/dog.jpg";
pictureBox1.Image = new Bitmap(image_path);
model_path = "model/yolov8n.engine";
if (!File.Exists(model_path))
{
//有点耗时,需等待
Nvinfer.OnnxToEngine("model/yolov8n.onnx", 20);
}
yoloV8 = new YoloV8(model_path, "model/lable.txt");
}
/// <summary>
/// 选择图片
/// </summary>
/// <param name="sender"></param>
/// <param name="e"></param>
private void button1_Click_1(object sender, EventArgs e)
{
OpenFileDialog ofd = new OpenFileDialog();
ofd.Filter = imgFilter;
if (ofd.ShowDialog() != DialogResult.OK) return;
pictureBox1.Image = null;
image_path = ofd.FileName;
pictureBox1.Image = new Bitmap(image_path);
textBox1.Text = "";
pictureBox2.Image = null;
}
/// <summary>
/// 选择视频
/// </summary>
/// <param name="sender"></param>
/// <param name="e"></param>
private void button4_Click(object sender, EventArgs e)
{
OpenFileDialog ofd = new OpenFileDialog();
ofd.Filter = videoFilter;
ofd.InitialDirectory = Application.StartupPath + "\\test";
if (ofd.ShowDialog() != DialogResult.OK) return;
video_path = ofd.FileName;
textBox1.Text = "";
pictureBox1.Image = null;
pictureBox2.Image = null;
button3_Click(null, null);
}
/// <summary>
/// 视频推理
/// </summary>
/// <param name="sender"></param>
/// <param name="e"></param>
private void button3_Click(object sender, EventArgs e)
{
if (video_path == "")
{
return;
}
textBox1.Text = "开始检测";
Application.DoEvents();
Thread thread = new Thread(new ThreadStart(VideoDetection));
thread.Start();
thread.Join();
textBox1.Text = "检测完成!";
}
void VideoDetection()
{
vcapture = new VideoCapture(video_path);
if (!vcapture.IsOpened())
{
MessageBox.Show("打开视频文件失败");
return;
}
tracker = new ByteTracker((int)vcapture.Fps, 200);
Mat frame = new Mat();
List<DetectionResult> detResults;
// 获取视频的fps
double videoFps = vcapture.Get(VideoCaptureProperties.Fps);
// 计算等待时间(毫秒)
int delay = (int)(1000 / videoFps);
Stopwatch _stopwatch = new Stopwatch();
if (checkBox1.Checked)
{
vwriter = new VideoWriter("out.mp4", FourCC.X264, vcapture.Fps, new OpenCvSharp.Size(vcapture.FrameWidth, vcapture.FrameHeight));
saveDetVideo = true;
}
else
{
saveDetVideo = false;
}
while (vcapture.Read(frame))
{
if (frame.Empty())
{
MessageBox.Show("读取失败");
return;
}
_stopwatch.Restart();
delay = (int)(1000 / videoFps);
detResults = yoloV8.Detect(frame);
//绘制结果
//foreach (DetectionResult r in detResults)
//{
// Cv2.PutText(frame, $"{r.Class}:{r.Confidence:P0}", new OpenCvSharp.Point(r.Rect.TopLeft.X, r.Rect.TopLeft.Y - 10), HersheyFonts.HersheySimplex, 1, Scalar.Red, 2);
// Cv2.Rectangle(frame, r.Rect, Scalar.Red, thickness: 2);
//}
Cv2.PutText(frame, "preprocessTime:" + yoloV8.preprocessTime.ToString("F2") + "ms", new OpenCvSharp.Point(10, 30), HersheyFonts.HersheySimplex, 1, Scalar.Red, 2);
Cv2.PutText(frame, "inferTime:" + yoloV8.inferTime.ToString("F2") + "ms", new OpenCvSharp.Point(10, 70), HersheyFonts.HersheySimplex, 1, Scalar.Red, 2);
Cv2.PutText(frame, "postprocessTime:" + yoloV8.postprocessTime.ToString("F2") + "ms", new OpenCvSharp.Point(10, 110), HersheyFonts.HersheySimplex, 1, Scalar.Red, 2);
Cv2.PutText(frame, "totalTime:" + yoloV8.totalTime.ToString("F2") + "ms", new OpenCvSharp.Point(10, 150), HersheyFonts.HersheySimplex, 1, Scalar.Red, 2);
Cv2.PutText(frame, "video fps:" + videoFps.ToString("F2"), new OpenCvSharp.Point(10, 190), HersheyFonts.HersheySimplex, 1, Scalar.Red, 2);
Cv2.PutText(frame, "det fps:" + yoloV8.detFps.ToString("F2"), new OpenCvSharp.Point(10, 230), HersheyFonts.HersheySimplex, 1, Scalar.Red, 2);
List<Track> track = new List<Track>();
Track temp;
foreach (DetectionResult r in detResults)
{
RectBox _box = new RectBox(r.Rect.X, r.Rect.Y, r.Rect.Width, r.Rect.Height);
temp = new Track(_box, r.Confidence, ("label", r.ClassId), ("name", r.Class));
track.Add(temp);
}
var trackOutputs = tracker.Update(track);
foreach (var t in trackOutputs)
{
Rect rect = new Rect((int)t.RectBox.X, (int)t.RectBox.Y, (int)t.RectBox.Width, (int)t.RectBox.Height);
//string txt = $"{t["name"]}-{t.TrackId}:{t.Score:P0}";
string txt = $"{t["name"]}-{t.TrackId}";
Cv2.PutText(frame, txt, new OpenCvSharp.Point(rect.TopLeft.X, rect.TopLeft.Y - 10), HersheyFonts.HersheySimplex, 1, Scalar.Red, 2);
Cv2.Rectangle(frame, rect, Scalar.Red, thickness: 2);
}
if (saveDetVideo)
{
vwriter.Write(frame);
}
Cv2.ImShow("DetectionResult", frame);
// for test
// delay = 1;
delay = (int)(delay - _stopwatch.ElapsedMilliseconds);
if (delay <= 0)
{
delay = 1;
}
//Console.WriteLine("delay:" + delay.ToString()) ;
if (Cv2.WaitKey(delay) == 27)
{
break; // 如果按下ESC,退出循环
}
}
Cv2.DestroyAllWindows();
vcapture.Release();
if (saveDetVideo)
{
vwriter.Release();
}
}
}
}
using ByteTrack;
using OpenCvSharp;
using System;
using System.Collections.Generic;
using System.Diagnostics;
using System.Drawing;
using System.IO;
using System.Threading;
using System.Windows.Forms;
using TensorRtSharp.Custom;namespace yolov8_TensorRT_Demo
{public partial class Form2 : Form{public Form2(){InitializeComponent();}string imgFilter = "*.*|*.bmp;*.jpg;*.jpeg;*.tiff;*.tiff;*.png";YoloV8 yoloV8;Mat image;string image_path = "";string model_path;string video_path = "";string videoFilter = "*.mp4|*.mp4;";VideoCapture vcapture;VideoWriter vwriter;bool saveDetVideo = false;ByteTracker tracker;/// <summary>/// 单图推理/// </summary>/// <param name="sender"></param>/// <param name="e"></param>private void button2_Click(object sender, EventArgs e){if (image_path == ""){return;}button2.Enabled = false;pictureBox2.Image = null;textBox1.Text = "";Application.DoEvents();image = new Mat(image_path);List<DetectionResult> detResults = yoloV8.Detect(image);//绘制结果Mat result_image = image.Clone();foreach (DetectionResult r in detResults){Cv2.PutText(result_image, $"{r.Class}:{r.Confidence:P0}", new OpenCvSharp.Point(r.Rect.TopLeft.X, r.Rect.TopLeft.Y - 10), HersheyFonts.HersheySimplex, 1, Scalar.Red, 2);Cv2.Rectangle(result_image, r.Rect, Scalar.Red, thickness: 2);}if (pictureBox2.Image != null){pictureBox2.Image.Dispose();}pictureBox2.Image = new Bitmap(result_image.ToMemoryStream());textBox1.Text = yoloV8.DetectTime();button2.Enabled = true;}/// <summary>/// 窗体加载,初始化/// </summary>/// <param name="sender"></param>/// <param name="e"></param>private void Form1_Load(object sender, EventArgs e){image_path = "test/dog.jpg";pictureBox1.Image = new Bitmap(image_path);model_path = "model/yolov8n.engine";if (!File.Exists(model_path)){//有点耗时,需等待Nvinfer.OnnxToEngine("model/yolov8n.onnx", 20);}yoloV8 = new YoloV8(model_path, "model/lable.txt");}/// <summary>/// 选择图片/// </summary>/// <param name="sender"></param>/// <param name="e"></param>private void button1_Click_1(object sender, EventArgs e){OpenFileDialog ofd = new OpenFileDialog();ofd.Filter = imgFilter;if (ofd.ShowDialog() != DialogResult.OK) return;pictureBox1.Image = null;image_path = ofd.FileName;pictureBox1.Image = new Bitmap(image_path);textBox1.Text = "";pictureBox2.Image = null;}/// <summary>/// 选择视频/// </summary>/// <param name="sender"></param>/// <param name="e"></param>private void button4_Click(object sender, EventArgs e){OpenFileDialog ofd = new OpenFileDialog();ofd.Filter = videoFilter;ofd.InitialDirectory = Application.StartupPath + "\\test";if (ofd.ShowDialog() != DialogResult.OK) return;video_path = ofd.FileName;textBox1.Text = "";pictureBox1.Image = null;pictureBox2.Image = null;button3_Click(null, null);}/// <summary>/// 视频推理/// </summary>/// <param name="sender"></param>/// <param name="e"></param>private void button3_Click(object sender, EventArgs e){if (video_path == ""){return;}textBox1.Text = "开始检测";Application.DoEvents();Thread thread = new Thread(new ThreadStart(VideoDetection));thread.Start();thread.Join();textBox1.Text = "检测完成!";}void VideoDetection(){vcapture = new VideoCapture(video_path);if (!vcapture.IsOpened()){MessageBox.Show("打开视频文件失败");return;}tracker = new ByteTracker((int)vcapture.Fps, 200);Mat frame = new Mat();List<DetectionResult> detResults;// 获取视频的fpsdouble videoFps = vcapture.Get(VideoCaptureProperties.Fps);// 计算等待时间(毫秒)int delay = (int)(1000 / videoFps);Stopwatch _stopwatch = new Stopwatch();if (checkBox1.Checked){vwriter = new VideoWriter("out.mp4", FourCC.X264, vcapture.Fps, new OpenCvSharp.Size(vcapture.FrameWidth, vcapture.FrameHeight));saveDetVideo = true;}else{saveDetVideo = false;}while (vcapture.Read(frame)){if (frame.Empty()){MessageBox.Show("读取失败");return;}_stopwatch.Restart();delay = (int)(1000 / videoFps);detResults = yoloV8.Detect(frame);//绘制结果//foreach (DetectionResult r in detResults)//{// Cv2.PutText(frame, $"{r.Class}:{r.Confidence:P0}", new OpenCvSharp.Point(r.Rect.TopLeft.X, r.Rect.TopLeft.Y - 10), HersheyFonts.HersheySimplex, 1, Scalar.Red, 2);// Cv2.Rectangle(frame, r.Rect, Scalar.Red, thickness: 2);//}Cv2.PutText(frame, "preprocessTime:" + yoloV8.preprocessTime.ToString("F2") + "ms", new OpenCvSharp.Point(10, 30), HersheyFonts.HersheySimplex, 1, Scalar.Red, 2);Cv2.PutText(frame, "inferTime:" + yoloV8.inferTime.ToString("F2") + "ms", new OpenCvSharp.Point(10, 70), HersheyFonts.HersheySimplex, 1, Scalar.Red, 2);Cv2.PutText(frame, "postprocessTime:" + yoloV8.postprocessTime.ToString("F2") + "ms", new OpenCvSharp.Point(10, 110), HersheyFonts.HersheySimplex, 1, Scalar.Red, 2);Cv2.PutText(frame, "totalTime:" + yoloV8.totalTime.ToString("F2") + "ms", new OpenCvSharp.Point(10, 150), HersheyFonts.HersheySimplex, 1, Scalar.Red, 2);Cv2.PutText(frame, "video fps:" + videoFps.ToString("F2"), new OpenCvSharp.Point(10, 190), HersheyFonts.HersheySimplex, 1, Scalar.Red, 2);Cv2.PutText(frame, "det fps:" + yoloV8.detFps.ToString("F2"), new OpenCvSharp.Point(10, 230), HersheyFonts.HersheySimplex, 1, Scalar.Red, 2);List<Track> track = new List<Track>();Track temp;foreach (DetectionResult r in detResults){RectBox _box = new RectBox(r.Rect.X, r.Rect.Y, r.Rect.Width, r.Rect.Height);temp = new Track(_box, r.Confidence, ("label", r.ClassId), ("name", r.Class));track.Add(temp);}var trackOutputs = tracker.Update(track);foreach (var t in trackOutputs){Rect rect = new Rect((int)t.RectBox.X, (int)t.RectBox.Y, (int)t.RectBox.Width, (int)t.RectBox.Height);//string txt = $"{t["name"]}-{t.TrackId}:{t.Score:P0}";string txt = $"{t["name"]}-{t.TrackId}";Cv2.PutText(frame, txt, new OpenCvSharp.Point(rect.TopLeft.X, rect.TopLeft.Y - 10), HersheyFonts.HersheySimplex, 1, Scalar.Red, 2);Cv2.Rectangle(frame, rect, Scalar.Red, thickness: 2);}if (saveDetVideo){vwriter.Write(frame);}Cv2.ImShow("DetectionResult", frame);// for test// delay = 1;delay = (int)(delay - _stopwatch.ElapsedMilliseconds);if (delay <= 0){delay = 1;}//Console.WriteLine("delay:" + delay.ToString()) ;if (Cv2.WaitKey(delay) == 27){break; // 如果按下ESC,退出循环}}Cv2.DestroyAllWindows();vcapture.Release();if (saveDetVideo){vwriter.Release();}}}}YoloV8.cs
using OpenCvSharp;
using OpenCvSharp.Dnn;
using System;
using System.Collections.Generic;
using System.Diagnostics;
using System.IO;
using System.Linq;
using System.Text;
using TensorRtSharp.Custom;namespace yolov8_TensorRT_Demo
{public class YoloV8{float[] input_tensor_data;float[] outputData;List<DetectionResult> detectionResults;int input_height;int input_width;Nvinfer predictor;public string[] class_names;int class_num;int box_num;float conf_threshold;float nms_threshold;float ratio_height;float ratio_width;public double preprocessTime;public double inferTime;public double postprocessTime;public double totalTime;public double detFps;public String DetectTime(){StringBuilder stringBuilder = new StringBuilder();stringBuilder.AppendLine($"Preprocess: {preprocessTime:F2}ms");stringBuilder.AppendLine($"Infer: {inferTime:F2}ms");stringBuilder.AppendLine($"Postprocess: {postprocessTime:F2}ms");stringBuilder.AppendLine($"Total: {totalTime:F2}ms");return stringBuilder.ToString();}public YoloV8(string model_path, string classer_path){predictor = new Nvinfer(model_path);class_names = File.ReadAllLines(classer_path, Encoding.UTF8);class_num = class_names.Length;input_height = 640;input_width = 640;box_num = 8400;conf_threshold = 0.25f;nms_threshold = 0.5f;detectionResults = new List<DetectionResult>();}void Preprocess(Mat image){//图片缩放int height = image.Rows;int width = image.Cols;Mat temp_image = image.Clone();if (height > input_height || width > input_width){float scale = Math.Min((float)input_height / height, (float)input_width / width);OpenCvSharp.Size new_size = new OpenCvSharp.Size((int)(width * scale), (int)(height * scale));Cv2.Resize(image, temp_image, new_size);}ratio_height = (float)height / temp_image.Rows;ratio_width = (float)width / temp_image.Cols;Mat input_img = new Mat();Cv2.CopyMakeBorder(temp_image, input_img, 0, input_height - temp_image.Rows, 0, input_width - temp_image.Cols, BorderTypes.Constant, 0);//归一化input_img.ConvertTo(input_img, MatType.CV_32FC3, 1.0 / 255);input_tensor_data = Common.ExtractMat(input_img);input_img.Dispose();temp_image.Dispose();}void Postprocess(float[] outputData){detectionResults.Clear();float[] data = Common.Transpose(outputData, class_num + 4, box_num);float[] confidenceInfo = new float[class_num];float[] rectData = new float[4];List<DetectionResult> detResults = new List<DetectionResult>();for (int i = 0; i < box_num; i++){Array.Copy(data, i * (class_num + 4), rectData, 0, 4);Array.Copy(data, i * (class_num + 4) + 4, confidenceInfo, 0, class_num);float score = confidenceInfo.Max(); // 获取最大值int maxIndex = Array.IndexOf(confidenceInfo, score); // 获取最大值的位置int _centerX = (int)(rectData[0] * ratio_width);int _centerY = (int)(rectData[1] * ratio_height);int _width = (int)(rectData[2] * ratio_width);int _height = (int)(rectData[3] * ratio_height);detResults.Add(new DetectionResult(maxIndex,class_names[maxIndex],new Rect(_centerX - _width / 2, _centerY - _height / 2, _width, _height),score));}//NMSCvDnn.NMSBoxes(detResults.Select(x => x.Rect), detResults.Select(x => x.Confidence), conf_threshold, nms_threshold, out int[] indices);detResults = detResults.Where((x, index) => indices.Contains(index)).ToList();detectionResults = detResults;}internal List<DetectionResult> Detect(Mat image){var t1 = Cv2.GetTickCount();Stopwatch stopwatch = new Stopwatch();stopwatch.Start();Preprocess(image);preprocessTime = stopwatch.Elapsed.TotalMilliseconds;stopwatch.Restart();predictor.LoadInferenceData("images", input_tensor_data);predictor.infer();inferTime = stopwatch.Elapsed.TotalMilliseconds;stopwatch.Restart();outputData = predictor.GetInferenceResult("output0");Postprocess(outputData);postprocessTime = stopwatch.Elapsed.TotalMilliseconds;stopwatch.Stop();totalTime = preprocessTime + inferTime + postprocessTime;detFps = (double)stopwatch.Elapsed.TotalSeconds / (double)stopwatch.Elapsed.Ticks;var t2 = Cv2.GetTickCount();detFps = 1 / ((t2 - t1) / Cv2.GetTickFrequency());return detectionResults;}}
}ByteTracker.cs
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Threading.Tasks;namespace ByteTrack
{public class ByteTracker{readonly float _trackThresh;readonly float _highThresh;readonly float _matchThresh;readonly int _maxTimeLost;int _frameId = 0;int _trackIdCount = 0;readonly List<Track> _trackedTracks = new List<Track>(100);readonly List<Track> _lostTracks = new List<Track>(100);List<Track> _removedTracks = new List<Track>(100);public ByteTracker(int frameRate = 30, int trackBuffer = 30, float trackThresh = 0.5f, float highThresh = 0.6f, float matchThresh = 0.8f){_trackThresh = trackThresh;_highThresh = highThresh;_matchThresh = matchThresh;_maxTimeLost = (int)(frameRate / 30.0 * trackBuffer);}/// <summary>/// /// </summary>/// <param name="objects"></param>/// <returns></returns>public IList<Track> Update(List<Track> tracks){#region Step 1: Get detections _frameId++;// Create new Tracks using the result of object detectionList<Track> detTracks = new List<Track>();List<Track> detLowTracks = new List<Track>();foreach (var obj in tracks){if (obj.Score >= _trackThresh){detTracks.Add(obj);}else{detLowTracks.Add(obj);}}// Create lists of existing STrackList<Track> activeTracks = new List<Track>();List<Track> nonActiveTracks = new List<Track>();foreach (var trackedTrack in _trackedTracks){if (!trackedTrack.IsActivated){nonActiveTracks.Add(trackedTrack);}else{activeTracks.Add(trackedTrack);}}var trackPool = activeTracks.Union(_lostTracks).ToArray();// Predict current pose by KFforeach (var track in trackPool){track.Predict();}#endregion#region Step 2: First association, with IoU List<Track> currentTrackedTracks = new List<Track>();Track[] remainTrackedTracks;Track[] remainDetTracks;List<Track> refindTracks = new List<Track>();{var dists = CalcIouDistance(trackPool, detTracks);LinearAssignment(dists, trackPool.Length, detTracks.Count, _matchThresh,out var matchesIdx,out var unmatchTrackIdx,out var unmatchDetectionIdx);foreach (var matchIdx in matchesIdx){var track = trackPool[matchIdx[0]];var det = detTracks[matchIdx[1]];if (track.State == TrackState.Tracked){track.Update(det, _frameId);currentTrackedTracks.Add(track);}else{track.ReActivate(det, _frameId);refindTracks.Add(track);}}remainDetTracks = unmatchDetectionIdx.Select(unmatchIdx => detTracks[unmatchIdx]).ToArray();remainTrackedTracks = unmatchTrackIdx.Where(unmatchIdx => trackPool[unmatchIdx].State == TrackState.Tracked).Select(unmatchIdx => trackPool[unmatchIdx]).ToArray();}#endregion#region Step 3: Second association, using low score dets List<Track> currentLostTracks = new List<Track>();{var dists = CalcIouDistance(remainTrackedTracks, detLowTracks);LinearAssignment(dists, remainTrackedTracks.Length, detLowTracks.Count, 0.5f,out var matchesIdx,out var unmatchTrackIdx,out var unmatchDetectionIdx);foreach (var matchIdx in matchesIdx){var track = remainTrackedTracks[matchIdx[0]];var det = detLowTracks[matchIdx[1]];if (track.State == TrackState.Tracked){track.Update(det, _frameId);currentTrackedTracks.Add(track);}else{track.ReActivate(det, _frameId);refindTracks.Add(track);}}foreach (var unmatchTrack in unmatchTrackIdx){var track = remainTrackedTracks[unmatchTrack];if (track.State != TrackState.Lost){track.MarkAsLost();currentLostTracks.Add(track);}}}#endregion#region Step 4: Init new tracks List<Track> currentRemovedTracks = new List<Track>();{// Deal with unconfirmed tracks, usually tracks with only one beginning framevar dists = CalcIouDistance(nonActiveTracks, remainDetTracks);LinearAssignment(dists, nonActiveTracks.Count, remainDetTracks.Length, 0.7f,out var matchesIdx,out var unmatchUnconfirmedIdx,out var unmatchDetectionIdx);foreach (var matchIdx in matchesIdx){nonActiveTracks[matchIdx[0]].Update(remainDetTracks[matchIdx[1]], _frameId);currentTrackedTracks.Add(nonActiveTracks[matchIdx[0]]);}foreach (var unmatchIdx in unmatchUnconfirmedIdx){var track = nonActiveTracks[unmatchIdx];track.MarkAsRemoved();currentRemovedTracks.Add(track);}// Add new stracksforeach (var unmatchIdx in unmatchDetectionIdx){var track = remainDetTracks[unmatchIdx];if (track.Score < _highThresh)continue;_trackIdCount++;track.Activate(_frameId, _trackIdCount);currentTrackedTracks.Add(track);}}#endregion#region Step 5: Update stateforeach (var lostTrack in _lostTracks){if (_frameId - lostTrack.FrameId > _maxTimeLost){lostTrack.MarkAsRemoved();currentRemovedTracks.Add(lostTrack);}}var trackedTracks = currentTrackedTracks.Union(refindTracks).ToArray();var lostTracks = _lostTracks.Except(trackedTracks).Union(currentLostTracks).Except(_removedTracks).ToArray();_removedTracks = _removedTracks.Union(currentRemovedTracks).ToList();RemoveDuplicateStracks(trackedTracks, lostTracks);#endregionreturn _trackedTracks.Where(track => track.IsActivated).ToArray();}/// <summary>/// /// </summary>/// <param name="aTracks"></param>/// <param name="bTracks"></param>/// <param name="aResults"></param>/// <param name="bResults"></param>void RemoveDuplicateStracks(IList<Track> aTracks, IList<Track> bTracks){_trackedTracks.Clear();_lostTracks.Clear();List<(int, int)> overlappingCombinations;var ious = CalcIouDistance(aTracks, bTracks);if (ious is null)overlappingCombinations = new List<(int, int)>();else{var rows = ious.GetLength(0);var cols = ious.GetLength(1);overlappingCombinations = new List<(int, int)>(rows * cols / 2);for (var i = 0; i < rows; i++)for (var j = 0; j < cols; j++)if (ious[i, j] < 0.15f)overlappingCombinations.Add((i, j));}var aOverlapping = aTracks.Select(x => false).ToArray();var bOverlapping = bTracks.Select(x => false).ToArray();foreach (var (aIdx, bIdx) in overlappingCombinations){var timep = aTracks[aIdx].FrameId - aTracks[aIdx].StartFrameId;var timeq = bTracks[bIdx].FrameId - bTracks[bIdx].StartFrameId;if (timep > timeq)bOverlapping[bIdx] = true;elseaOverlapping[aIdx] = true;}for (var ai = 0; ai < aTracks.Count; ai++)if (!aOverlapping[ai])_trackedTracks.Add(aTracks[ai]);for (var bi = 0; bi < bTracks.Count; bi++)if (!bOverlapping[bi])_lostTracks.Add(bTracks[bi]);}/// <summary>/// /// </summary>/// <param name="costMatrix"></param>/// <param name="costMatrixSize"></param>/// <param name="costMatrixSizeSize"></param>/// <param name="thresh"></param>/// <param name="matches"></param>/// <param name="aUnmatched"></param>/// <param name="bUnmatched"></param>void LinearAssignment(float[,] costMatrix, int costMatrixSize, int costMatrixSizeSize, float thresh, out IList<int[]> matches, out IList<int> aUnmatched, out IList<int> bUnmatched){matches = new List<int[]>();if (costMatrix is null){aUnmatched = Enumerable.Range(0, costMatrixSize).ToArray();bUnmatched = Enumerable.Range(0, costMatrixSizeSize).ToArray();return;}bUnmatched = new List<int>();aUnmatched = new List<int>();var (rowsol, colsol) = Lapjv.Exec(costMatrix, true, thresh);for (var i = 0; i < rowsol.Length; i++){if (rowsol[i] >= 0)matches.Add(new int[] { i, rowsol[i] });elseaUnmatched.Add(i);}for (var i = 0; i < colsol.Length; i++)if (colsol[i] < 0)bUnmatched.Add(i);}/// <summary>/// /// </summary>/// <param name="aRects"></param>/// <param name="bRects"></param>/// <returns></returns>static float[,] CalcIous(IList<RectBox> aRects, IList<RectBox> bRects){if (aRects.Count * bRects.Count == 0) return null;var ious = new float[aRects.Count, bRects.Count];for (var bi = 0; bi < bRects.Count; bi++)for (var ai = 0; ai < aRects.Count; ai++)ious[ai, bi] = bRects[bi].CalcIoU(aRects[ai]);return ious;}/// <summary>/// /// </summary>/// <param name="aTtracks"></param>/// <param name="bTracks"></param>/// <returns></returns>static float[,] CalcIouDistance(IEnumerable<Track> aTtracks, IEnumerable<Track> bTracks){var aRects = aTtracks.Select(x => x.RectBox).ToArray();var bRects = bTracks.Select(x => x.RectBox).ToArray();var ious = CalcIous(aRects, bRects);if (ious is null) return null;var rows = ious.GetLength(0);var cols = ious.GetLength(1);var matrix = new float[rows, cols];for (var i = 0; i < rows; i++)for (var j = 0; j < cols; j++)matrix[i, j] = 1 - ious[i, j];return matrix;}}
}
下载
源码下载
参考
https://github.com/devhxj/Yolo8-ByteTrack-CSharp
https://github.com/guojin-yan/TensorRT-CSharp-API
这篇关于C# yolov8 TensorRT +ByteTrack Demo的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



