本文主要是介绍启智CV机器人,ROS,ubuntu 20.04 【最后一步有问题】,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
资料:
https://wiki.ros.org/kinetic/Installation/Ubuntu
https://blog.csdn.net/qq_44339029/article/details/120579608
装VM。
装ubuntu20.04 desktop.iso系统。
装vm工具:
sudo apt update
sudo dpkg --configure -a
sudo apt-get autoremove open-vm-tools
sudo apt-get install open-vm-tools -y
sudo apt-get install open-vm-tools-desktop -y重启虚拟机。
断网修复:
sudo rmmod e1000
sudo rmmod e1000e
sudo rmmod igbsudo modprobe e1000
sudo modprobe e1000e
sudo modprobe igbsudo dhclient ens33sudo apt-get update && sudo apt-get upgrade
sudo apt-get purge network-manager
sudo apt-get install network-manager进root:
sudo -iapt install vim -y
增加ros软件源:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'更换秘钥:
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
更新软件源:
sudo apt update
安装ros:
sudo apt install ros-noetic-desktop-full -y
完成后是这样:
sudo apt install python3-rosdep2
vim /etc/hosts
通过IPAddress.com首页,输入raw.githubusercontent.com查询到最新的真实IP地址
185.199.108.133 raw.githubusercontent.comrosdep init
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrcsource ~/.bashrc安装rosinstall
sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool -y可以看到:
验证ROS是否安装成功
sudo apt install python3-roslaunch
sudo apt install ros-noetic-desktop-fullroscore正常会出现:
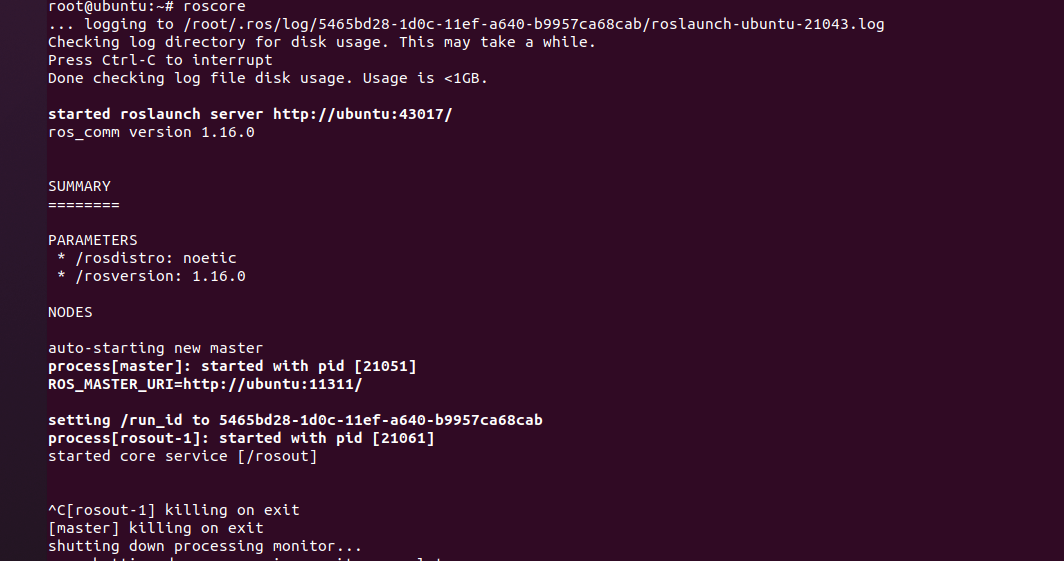
这样就是不正常:
做实验:
cd ~
sudo apt install python3-catkin-tools python3-osrf-pycommon
source /opt/ros/noetic/setup.bash
mkdir -p /root/catkin_ws/srccd /root/catkin_ws/src # 很重要!
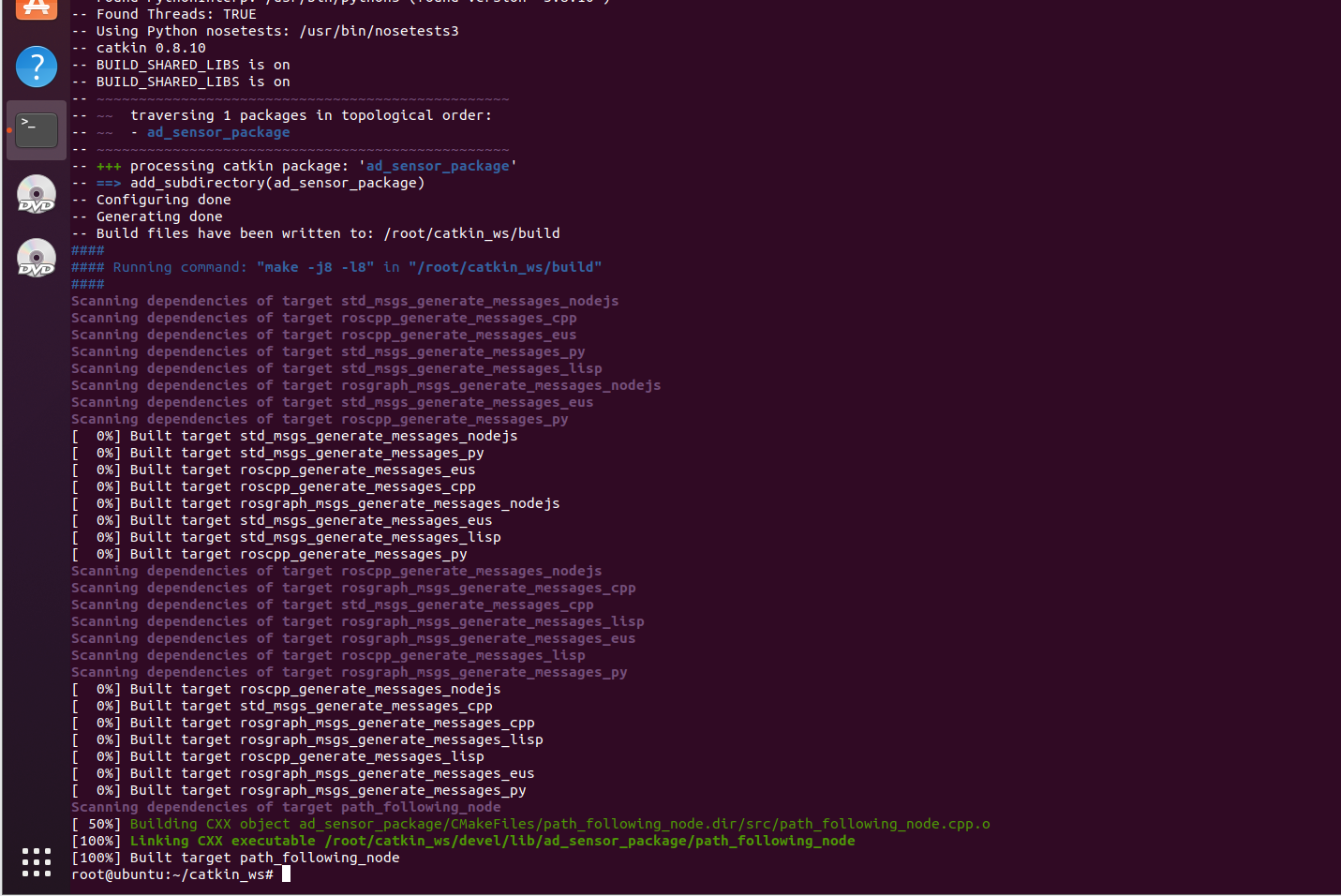
catkin_create_pkg ad_sensor_package roscpp std_msgscd /root/catkin_ws
catkin_make一定要注意我的执行顺序,最后一句catkin_make构建工作空间后是这样:
获取源码:
cd ~/catkin_ws/src/
git clone https://github.com/6-robot/wpb_cv.git
git clone https://github.com/orbbec/ros_astra_camera.git
# git clone https://github.com/orbbec/ros_astra_launch.git # 要权限!!??
git clone https://github.com/tfoote/ros_astra_launch.git
git clone https://github.com/ros-drivers/rgbd_launch.git
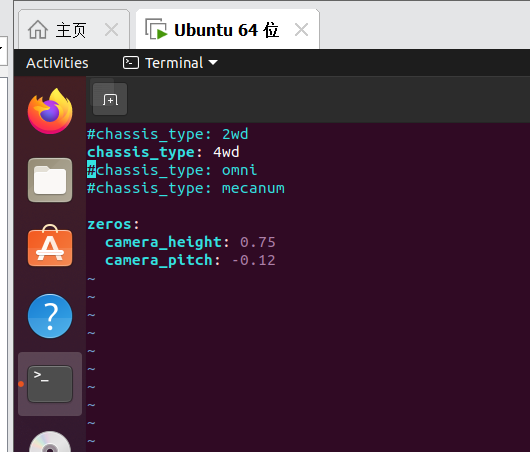
修改settings.yam:
cd /root/catkin_ws/src/wpb_cv/wpb_cv_bringup/config
再次构建:
apt install python3-rosdep2 --fix-missing
sudo apt install ros-noetic-rostest
sudo apt-get install ros-noetic-tfsudo apt-get install ros-noetic-joy -y
sudo apt-get install ros-noetic-hector-mapping -y
sudo apt-get install ros-noetic-gmapping -y
sudo apt-get install ros-noetic-navigation -y
sudo apt-get install ros-noetic-sound-play -y
sudo apt-get install ros-noetic-astra-camera -y
sudo apt-get install ros-noetic-astra-launch -y
sudo apt-get install ros-noetic-depthimage-to-laserscan -y
sudo apt-get install ros-noetic-libuvc -ycd /root/catkin_ws
catkin_make
启动节点:
roslaunch wpb_cv_bringup minimal.launch
这篇关于启智CV机器人,ROS,ubuntu 20.04 【最后一步有问题】的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





