本文主要是介绍恶劣天候激光雷达点云模拟方法论文整理,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
恶劣天候点云模拟方法论文整理
- 模拟雨天点云:【AAAI2024】
- 模拟雪天点云:【CVPR 2022 oral】
- 模拟雾天点云:【ICCV2021】
- 模拟点云恶劣天候的散射现象:【Arxiv 2021】
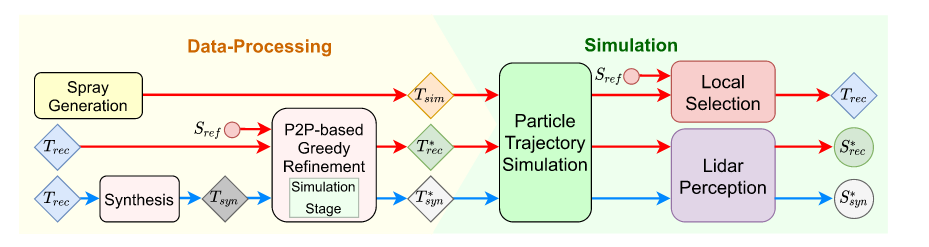
- 模拟积水地面的水花飞溅点云:【RAL2022】
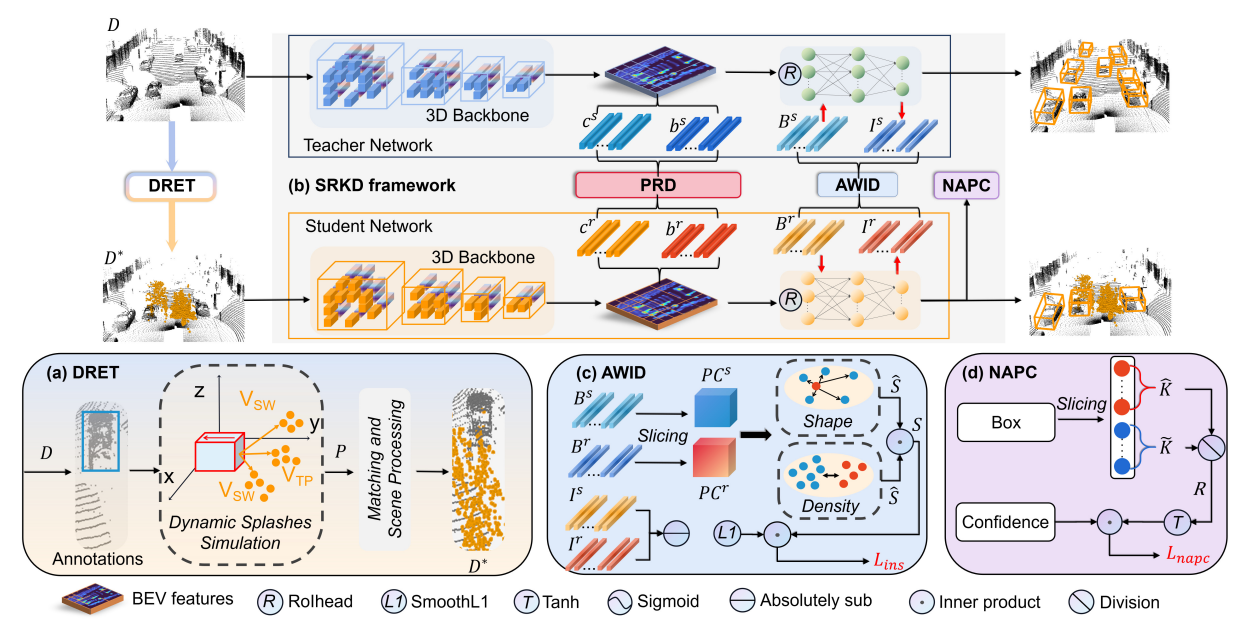
模拟雨天点云:【AAAI2024】
Sunshine to Rainstorm: Cross-Weather Knowledge Distillation for Robust 3D Object Detection
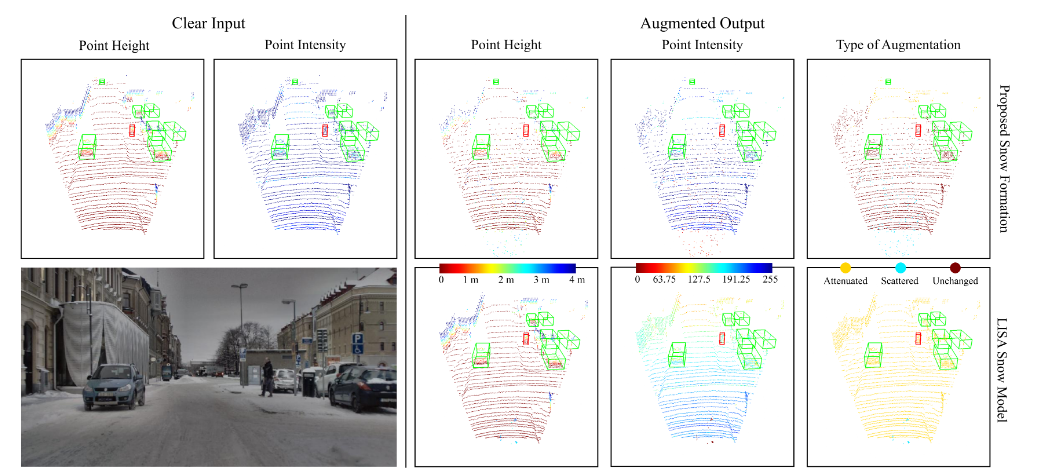
模拟雪天点云:【CVPR 2022 oral】
LiDAR Snowfall Simulation for Robust 3D Object Detection
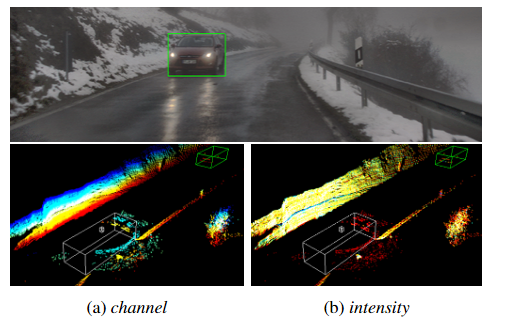
模拟雾天点云:【ICCV2021】
Fog Simulation on Real LiDAR Point Clouds for 3D Object Detection in Adverse Weather
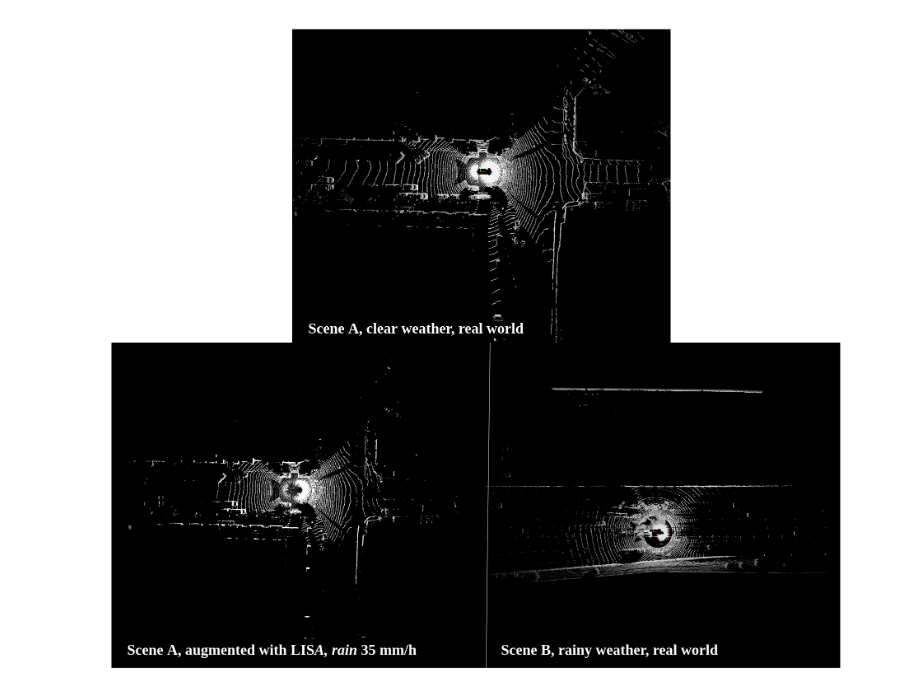
模拟点云恶劣天候的散射现象:【Arxiv 2021】
Lidar Light Scattering Augmentation (LISA): Physics-based Simulation of Adverse Weather Conditions for 3D Object Detection.
模拟积水地面的水花飞溅点云:【RAL2022】
Reconstruction and Synthesis of Lidar Point Clouds of Spray
这篇关于恶劣天候激光雷达点云模拟方法论文整理的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









