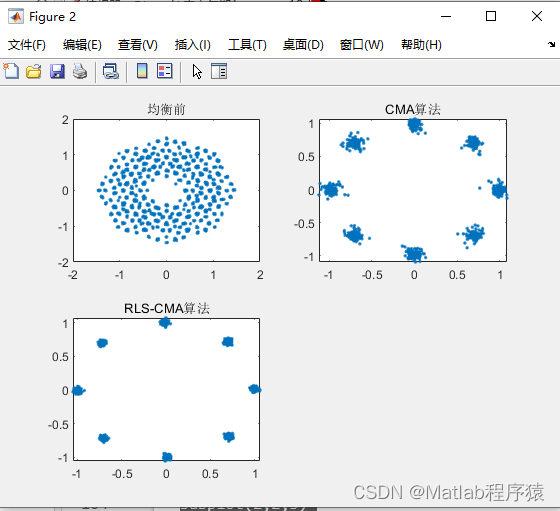
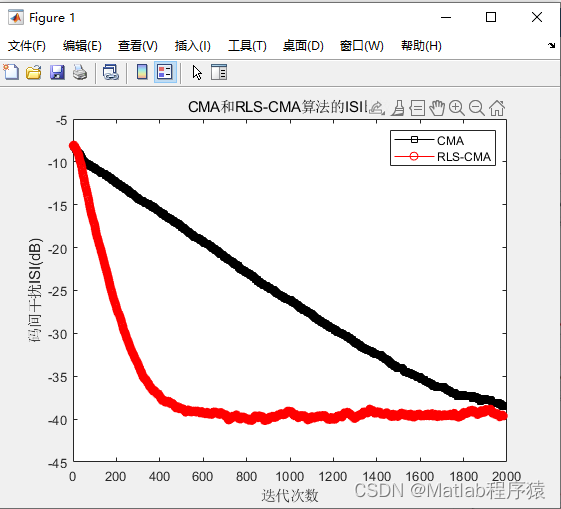
本文主要是介绍【MATLAB源码-第215期】基于matlab的8PSK调制CMA均衡和RLS-CMA均衡对比仿真,对比星座图和ISI。,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
操作环境:
MATLAB 2022a
1、算法描述
CMA算法(恒模算法)
CMA(Constant Modulus Algorithm,恒模算法)是一种自适应盲均衡算法,主要用于消除信道对信号的码间干扰(ISI),恢复出原始信号。CMA算法的核心思想是通过调整均衡器的权重,使输出信号的模保持恒定。
CMA算法原理:
-
初始化:
- 设置滤波器的初始权重,通常初始权重是一个具有中心抽头的单位向量。
- 设定步长因子(μ),这是权重更新的速度控制参数。
-
信号输入:
- 输入信号经过信道,产生带有码间干扰的信号。
- 对接收到的信号添加高斯白噪声(AWGN),以模拟实际通信环境中的噪声。
-
权重更新:
- 提取输入信号块,将其反转作为滤波器的输入。
- 计算滤波器的输出信号。
- 计算误差,该误差是输出信号与其模平方的偏差(即输出信号的能量偏差)。
- 根据误差调整滤波器权重,以使输出信号的模趋于恒定。
-
迭代:
- 重复上述权重更新过程,直到达到设定的迭代次数或收敛条件。
-
码间干扰计算:
- 计算码间干扰(ISI)值,通常通过卷积计算滤波器权重与信道冲激响应的结果。
RLS-CMA算法(递归最小二乘恒模算法)
RLS-CMA(Recursive Least Squares Constant Modulus Algorithm,递归最小二乘恒模算法)是对CMA算法的改进,采用递归最小二乘(RLS)方法来更新均衡器权重。RLS-CMA结合了RLS算法和CMA算法的优势,具有更快的收敛速度和更好的均衡性能。
RLS-CMA算法原理:
-
初始化:
- 设置滤波器的初始权重,通常初始权重是一个具有中心抽头的单位向量。
- 设定遗忘因子(λ)和初始误差(δ),其中遗忘因子控制历史数据的重要性,初始误差用于初始化协方差矩阵。
- 初始化协方差矩阵。
-
信号输入:
- 输入信号经过信道,产生带有码间干扰的信号。
- 对接收到的信号添加高斯白噪声(AWGN),以模拟实际通信环境中的噪声。
-
权重更新:
- 提取输入信号块,将其反转作为滤波器的输入。
- 计算滤波器的输出信号。
- 计算误差矢量,该误差矢量是输入信号块与滤波器权重的乘积。
- 计算增益矢量,用于调整协方差矩阵和滤波器权重。
- 更新协方差矩阵,根据遗忘因子和增益矢量进行调整。
- 根据误差和增益矢量更新滤波器权重,使输出信号的模趋于恒定。
-
迭代:
- 重复上述权重更新过程,直到达到设定的迭代次数或收敛条件。
-
码间干扰计算:
- 计算码间干扰(ISI)值,通常通过卷积计算滤波器权重与信道冲激响应的结果。
RLS-CMA算法的优势
-
收敛速度快:相比CMA算法,RLS-CMA算法通过引入递归最小二乘方法,使权重更新更精确,从而显著加快了收敛速度。
-
稳态性能好:RLS-CMA算法在稳态时的均衡性能优于CMA算法,能更好地消除码间干扰,恢复出原始信号。
-
适应性强:RLS-CMA算法能够更好地适应信道变化,对信号的估计更准确,因此在实际应用中具有更好的鲁棒性。
通过结合RLS和CMA的优点,RLS-CMA算法在实际通信系统中表现出更好的性能,尤其在需要快速收敛和高精度均衡的场合下。
2、仿真结果演示
3、关键代码展示
略
4、MATLAB 源码获取
V
点击下方名片
这篇关于【MATLAB源码-第215期】基于matlab的8PSK调制CMA均衡和RLS-CMA均衡对比仿真,对比星座图和ISI。的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






