akaxi专题
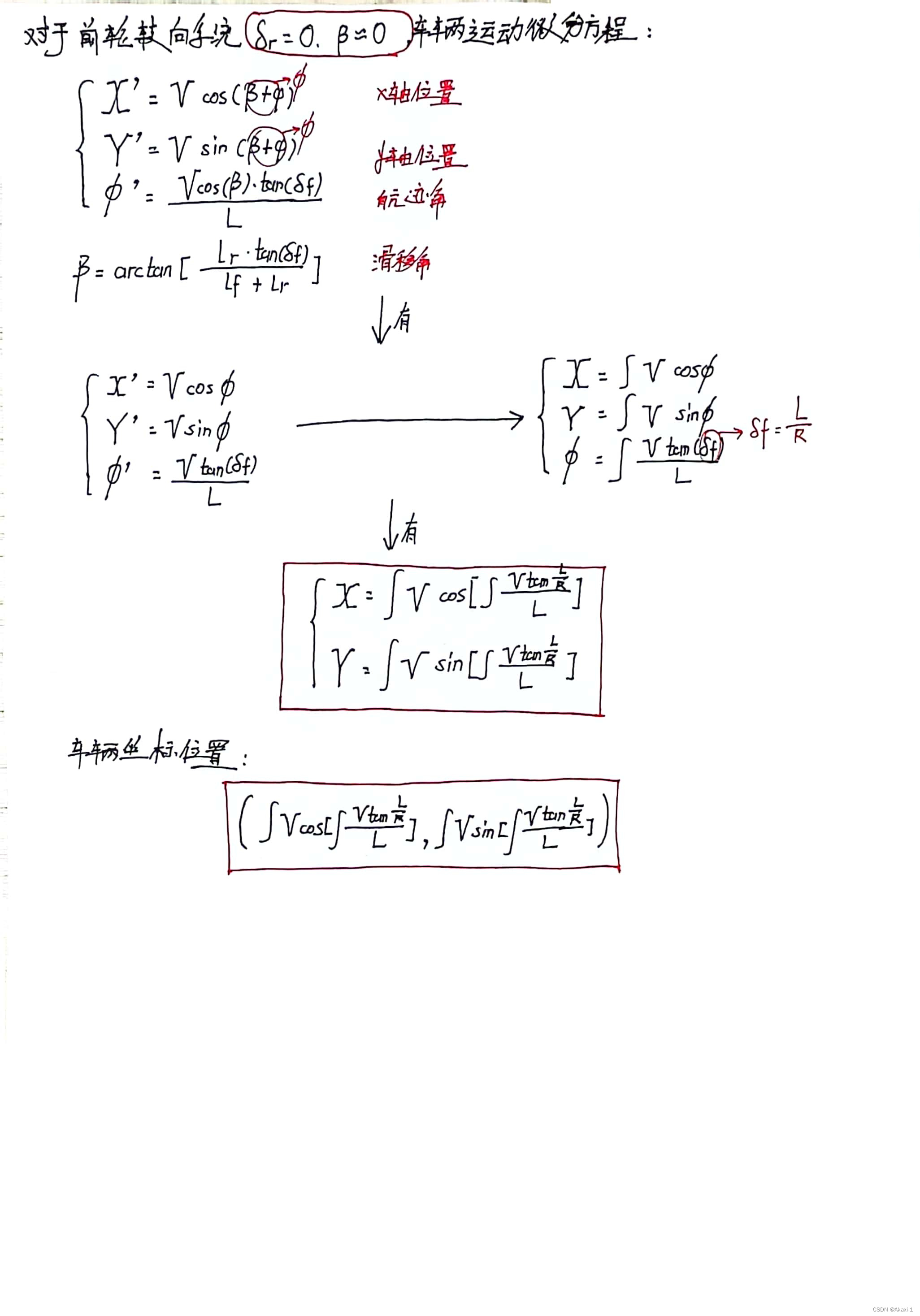
【自动驾驶车辆-运动控制】运动学模型(Kinematic Model) | 手写数学推导公式 by.Akaxi
【前言】 在设计自动驾驶规控算法时,常常需要获取车辆的各种位姿、角度等信息,要控制车辆的运动,首先要对车辆的运动建立数字化模型,模型建立的越准确,对车辆运动的描述越准确,对车辆的跟踪控制的效果就越好。除了真实反映车辆特性外,建立的模型也应该尽可能的简单易用,自行车模型(Bicycle Model)是一种常见的车辆运动学模型,以下是对车辆运动学模型的数学公式推导: -----------
【基于Ubuntu20.04的Autoware.universe安装过程】方案一:虚拟机 | 详细记录 | Vmware | 全过程图文 by.Akaxi
目录 一、Autoware.universe背景 二、虚拟机配置 三、Ubuntu20.04安装 四、GPU显卡安装 五、ROS2-Galactic安装 六、ROS2-dev-tools安装 七、rmw-implementation安装 八、pacmod安装 九、autoware-core安装 十、autoware universe dependencies安装 十一、安装p