acquisition专题
![[rust-012]关于RATT(Resource Acquisition Is Initialization资源获取即初始化)的问题](/front/images/it_default2.jpg)
[rust-012]关于RATT(Resource Acquisition Is Initialization资源获取即初始化)的问题
参考文档:https://doc.rust-lang.org/rust-by-example/scope/raii.html Rust的变量,在堆上持有数据,也就是持有对应的资源。所以当程序运行完一个scope之后,它里面的变量被释放,资源也就释放了。由此解决了资源泄漏问题。 fn create_box() {// 在堆上分类一个证书Allocate an integer on the hea
开源相机管理库Aravis例程学习(二)——连续采集multiple-acquisition-main-thread
开源相机管理库Aravis例程学习(二)——连续采集multiple-acquisition-main-thread 简介例程代码函数说明arv_camera_set_acquisition_modearv_camera_create_streamarv_camera_get_payloadarv_buffer_newarv_stream_push_bufferarv_camera_star
Halcon Solution Guide I basics(2): Image Acquisition(图像加载)
文章目录 文章专栏前言文章解读文章开头流程图算子介绍案例自主练习读取一张图片读取多张图片 文章专栏 Halcon开发 Halcon学习 练习项目gitee仓库 前言 今天来看Halcon的第二章,图像获取。在第二章之后,后面文章就会提供案例了。到时候我会尽量完成每一个案例,和去找相似的案例去尝试解决 文章解读 文章开头 图像识别是非常常用的技术,本文正
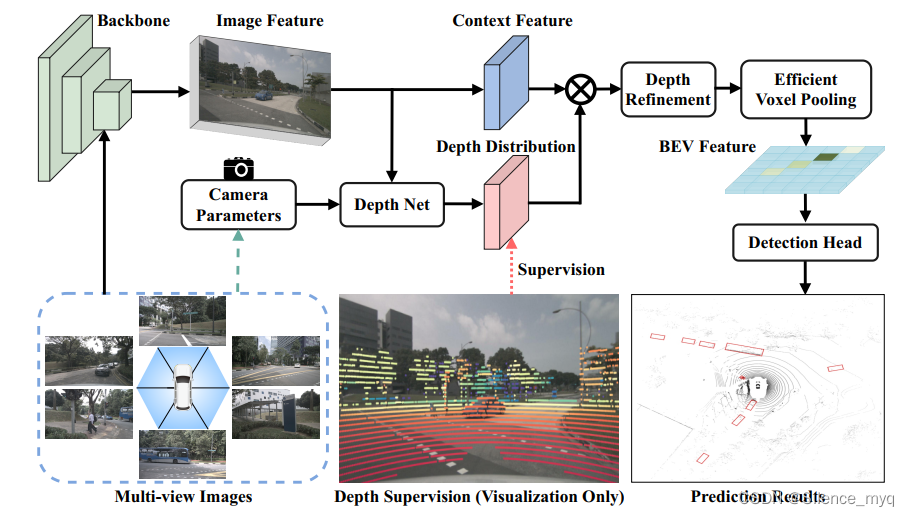
BEVDepth: Acquisition of Reliable Depth for Multi-view 3D Object Detection
BEVDepth: Acquisition of Reliable Depth for Multi-view 3D Object Detection 相关论文摘要简介 AAAI2023 - BEVDepth: Acquisition of Reliable Depth for Multi-view 3D Object Detection 相关论文 DETR3D:DETR3D:
BEVDepth: Acquisition of Reliable Depth for Multi-view 3D Object Detection 论文笔记
原文链接:https://arxiv.org/abs/2206.10092 1.引言 目前的图像3D目标检测方法在深度估计上的效果很差。基于深度3D检测器特点: 若无真实深度的监督,虽然最终的3D检测结果鼓励模型输出正确的深度,但要学习到精确的深度是很困难的;此外,理论上深度子网络应该根据相机内外参推断深度,但目前方法都没有这么做;深度估计后的视图转换子网络很低效,比不基于深