6d专题

Haption Virtuose 6D力反馈设备遥操作机器人应用研究
在虚拟现实和远程操作技术的飞速发展下,力反馈设备成为了一个不可或缺的工具。其中,Haption Virtuose 6D力反馈设备以其卓越的性能和广泛的应用领域,成为了这一领域的佼佼者。本文将详细介绍Haption Virtuose 6D力反馈设备及其在遥操作机器人中的应用。 一、Haption Virtuose 6D力反馈设备概述 Haption Virtuose 6D

搜维尔科技:Haption Virtuose 6D TAO 力反馈设备,专为机器人的和遥操作市场设计
HaptionVirtuose 6D TAO 力反馈设备,专为机器人的和遥操作市场设计 搜维尔科技:Haption Virtuose 6D TAO 力反馈设备,专为机器人的和遥操作市场设计

目标检测YOLO实战应用案例100讲-基于YOLOv5的目标检测与6D位姿估计算法研究(中)
目录 3.3 相机成像原理 3.3.1 坐标系的建立及关系 3.3.2 相机标定 3.3.3 相机畸变
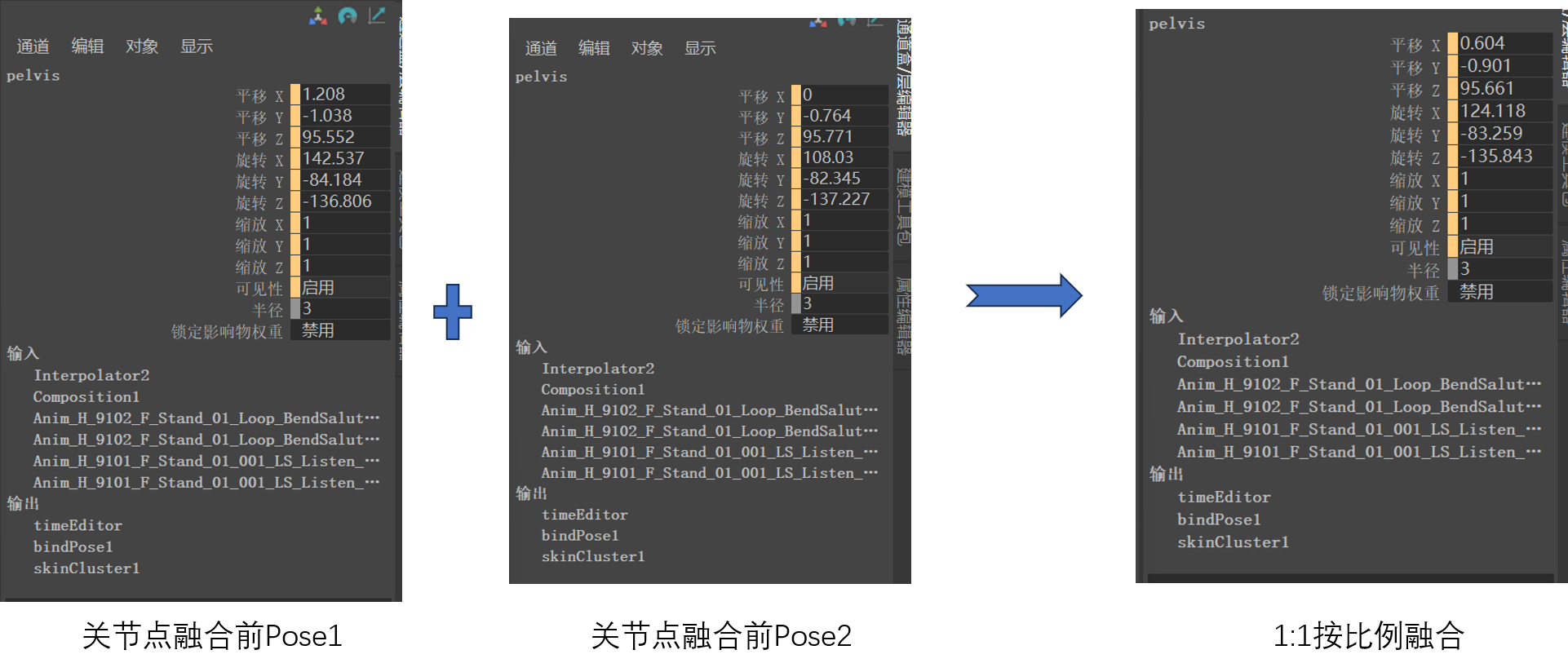
AIGC笔记--关节点6D位姿按比例融合
1--核心代码 6D位姿一般指平移向量和旋转向量,Maya软件中关节点的6D位姿指的是相对平移向量和欧拉旋转向量; 为了按比例融合两个Pose,首先需要将欧拉旋转向量转换为旋转矩阵,在将旋转矩阵转换为四元数,利用球面线性插值实现Pose的融合,融合后的四元数需要重新转换为欧拉旋转向量,整个流程如下:欧拉旋转向量→旋转矩阵→四元数→球面线性插值→旋转矩阵→欧拉旋转
【C/C++】输出格式%d、%6d、%06d、%-6d、%.6f的区分
【C/C++】输出格式%d、%6d、%06d、%-6d、%.6f的区分 文章目录 【C/C++】输出格式%d、%6d、%06d、%-6d、%.6f的区分1、%d 普通的整数输出2、%6d 整数输出,宽度是6位,不足左边补空格3、%06d 整数输出,宽度是6位,不足左边补数字04、%-6d 整数输出,宽度是6位,不足右边补空格5、%.6f 输出小数,即保留小数点后6位 1、%
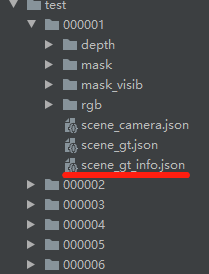
6D位姿估计的理解及BOP数据集参数说明
6D位姿估计的理解及BOP数据集参数说明 一、6D位姿估计 姿态估计在百度上搜会出现“姿态估计问题就是确定某一三维目标物体的方位指向问题”的解释,但是具体来讲确定某一三维目标物体的方位指向问题到底是什么意思呢? 首先,6D表示6个自由度,3个自由度的位移(Translation)和3个自由度的空间旋转(Rotation)。位移即方位,旋转即指向。将它们组合起来便构成了“位姿”。位姿并不是绝对的

摄影学习:CANON EOS 6D+小痰盂人像镜头人像模式设置(参考)
目录 文章目录 前言 一、相机设置 二、各风格参数 1.唯美逆光【适合丛林】 2.日系小清新【适合铁轨】 3.日系油肌少女【适合室内】 4.古风少女【适合公园】 5.韩系奶油【适合芦苇地】 6.胶片少女风【适合晴天】 总结 前言 最近,在学习摄影,下面记录一下在B站看到的一个视频,本文仅供自己学习使用,以及大家一起探讨,视频具体链接为: 单反设置 | 佳能人像这
论文笔记(四十)Goal-Auxiliary Actor-Critic for 6D Robotic Grasping with Point Clouds
Goal-Auxiliary Actor-Critic for 6D Robotic Grasping with Point Clouds 文章概括摘要1. 介绍2. 相关工作3. 学习 6D 抓握政策3.1 背景3.2 从点云抓取 6D 策略3.3 联合运动和抓握规划器的演示3.4 行为克隆和 DAGGER3.5 目标--辅助 DDPG3.6 对未知物体进行微调的后视目标 4. 实验4.1

活动报名|港中文博士生陈凯:6D物体位姿估计及其在机器人抓取中的应用
11月30日(周三)晚上19:00「青源Live 第56期丨6D物体位姿估计及其在机器人抓取中的应用 」将在线举办,来自香港中文大学计算机科学与工程学系的博士生陈凯(师从窦琪教授)做报告分享,欢迎预约观看并参与线上交流。 陈凯 香港中文大学计算机科学与工程学系博士生,导师为窦琪教授。研究方向包括三维视觉、物体位姿估计、基于多传感器系统的机器人环境感知等,相关论文发表在ICCV, ECCV,
NXP/Freescale i.MX 计算机模块 - NXP i.MX 8Q、i.MX 6Q、i.MX 6D、i.MX 6DL、i.MX 6S、i.MX 6ULL、i.MX 7D 和 i.MX 7S
https://www.toradex.com/zh_cn/computer-on-modules/nxp-freescale-i.mx NXP®/Freescale i.MX 计算机模块 NXP®/Freescale i.MX 处理器是采用多核 ARM 的解决方案。Toradex 提供基于 NXP/Freescale i.MX 8、i.MX 6 和 i.MX 7 处理器的系统模块
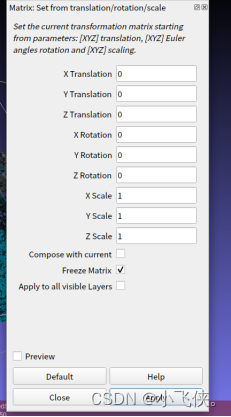
记录::6d位姿数据集-meshlab简单使用-修改单位度量
制作6d数据集的时候,难免要对点云进行处理,小白记录一下操作指南 目录 1、安装 2、选中背景,删除 3、生成三角化 4、保存 5、修改单位度量 1、安装 Releases · cnr-isti-vclab/meshlab · GitHub 下载tar,解压,然后在终端运行 ./AppRun,然后把x.ply文件托进来打开 2、选中背景,删除 就用这两个

EPOS: Estimating 6D Pose of Objects with Symmetries
EPOS 1 表面面片2 网络架构2.1 语义分割2.2 所属面片分类2.3 三维点坐标回归2.4 损失函数 3 对称物体4 位姿求解 EPOS本质上也是一种基于2D-3D稠密对应的6D位姿估计方法,只不过它不是直接回归得到物体图像区域某像素对应的归一化的三维坐标点,而是将物体三维模型表面分割成一定数量的面片,这样在确定2D-3D对应关系时,首先是确定二维像素点对应的面片

严苛的欧6d排放标准 魏牌摩卡PHEV开启出海欧洲新进程
10月17日,2022巴黎车展正式开幕。魏牌以“HELLO WORLD,SALUT PARIS! (你好世界,你好巴黎!)”为主题,携新能源双子星摩卡PHEV(Coffee 01)、拿铁PHEV(Coffee 02)重磅登场,并宣布摩卡PHEV(Coffee 01)正式在欧洲上市,售价55,900-59,900欧元(折合人民币约39-42万),与欧洲在售豪华车型相当,广受欧洲市场的接纳和好评。

6D Object Pose Estimation in Cluttered Scenes from RGB Images
文章目录 摘要贡献方法 摘要 本文提出一种特征融合网络,用于直接从RGB图像进行姿态估计,而无需任何深度信息。首先,我们引入一个由分割分支和回归分支组成的双流架构。分割分支处理空间嵌入特征并获得相应的图像裁剪。这些功能与融合网络中的图像裁剪进一步耦合。其次,我们在回归分支中使用高效的透视 n 点 (E-PnP) 算法来提取 3D 和 2D 关键点之间的鲁棒空间特征。最后,我们

再添动能,拓宽旅途新音域:「6D超感声场」刷新KEF与路特斯合作之路
中国成都——2023年8月29日:强强联手,方能驶抵“极致”之地。近日,英国瑰宝级音响品牌KEF与拥有冠军底蕴的英国知名座驾品牌路特斯再次携手,并在新伙伴——杜比全景声的加持下,共同打造全球首款纯电超跑SUV路特斯Eletre的升级版数字座舱,赋予听者丝滑流动的座舱聆听体验,带领驾驭者驶向“声”临其境的感官共振之境。 「6D超感声场」助力路特斯Eletre升级版数字座舱 联袂协作 共创