路程专题

新路程------imx6的uart小结(1)
imx6用的是RS485,今天看看这个接口是怎么初始化的。 首先在./arch/arm/mach-mx6/board-mx6q_sabresd.c里找uart的相关信息 在static void __init mx6_sabresd_board_init(void)肯定会有初始化的相关信息 gpio_request(SABRESD_EPDC_PWRSTAT, "uart

新路程------imx6 lvds ioctl
最近有个需求,做一些接口给上层应用调用 于是看了一下驱动,linux有一套标准的framebuffer机制让我们做接口,就是fb_ioctl 首先看对应的framebuffer驱动,在之前的ldb.c中,确实配置了对应的fb_info结构体,但是要修改这个结构体的参数并不需要在ldb.c中做,在mxc_ipuv3_fb.c里 static struct fb_ops mxcfb_ops
新路程------英飞凌imx6的lvds驱动
最近拿到一块开发版,打算在lvds上做些小修改,之前也接触过一点驱动,但是现在的驱动框架看起来和之前的有点差异。 关于lcd的参数信息请参考这篇文章 http://blog.csdn.net/longxiaowu/article/details/24319933 lvds的驱动在framebuffer驱动之下,也就是上层应用只知道有个framebuffer设备也就是dev/fb,而至于下
新路程----海思 uboot(1)
先看start.s吧 .globl _start //.global声明_start为全局符号,_start就会被连接器链接到,也就是链接脚本中的入口地址了。_start: b reset //跳转到reset 下面的代码是设置arm的异常向量表ldr pc, _undefined_instruction //把label后的数据或者指令内容赋值给pcldr pc, _softw
新路程------编译海思代码遇到的问题
问题如下,解决方案就在问题下方,我的ubuntu版本是14.04 ********************************************************************** “mkimage” command not found – U-Boot images will not be built sudo apt-get install u-boot-

新路程--------安装海思Hi3516A/Hi3516D SDK出现问题
搞板子首先要配置开发环境,这个编译的要求不高,所以虚拟机就可以搞定了,于是我就在windows上装了vm然后安装了虚拟机 vm的版本是11,ubuntu的版本是12.04,别的我没试过,至少可以保证这两个是ok的。 然后装sdk,根据使用说明来,先copy sdk到home目录下(哪个目录应该无所谓,为了方便起见放在了home里),然后点击那个sdk.unpack,结果出问题了
新路程------hi3516a的uart rts cts功能
有位前辈写了以gpio方式控制rts,在驱动内核中修改http://blog.csdn.net/edw200/article/details/52251385?locationNum=4 就是在发送前拉高,发送后拉低,但是这样要计算时间,比较麻烦,而且不同的波特率容易时间计算不准确,所以还是应该由上层把这个事做了,也就是用ioctl的形式来做,这样比较安全放心。 r
新路程------hi3516a 在应用层对寄存器的操作
由于在应用层没法用writel,所以参考himm.c写了一个设置,代码如下: void uart1_rtsn_high(void) { void * pMem = NULL; pMem = memmap(0x201d0010, DEFAULT_MD_LEN); *(U32*)pMem = 0xff; } 文件名是rs485.c,但是用arm-hisiv300-linux
新路程------hi3516a uart1 rs485
我选用的转换ic 是SN65HVD82 ,控制DE和RE控制输出还是接收 是UART1_RTSN/GPIO9_2/UART3_RXD 控制 himm 0x200f0078 0x00 #SET DIR AS OUT himm 0x201d0400 0x84 #SET DIR AS LOW himm 0x201d0010 0x00 然后看看uart1的设置是否正常,跑
新路程------udev影响sd卡挂载
本来想搞个开机自动挂载sd卡,那在fstab里加了这么句话 /dev/mmcblk0p1 /mnt vfat defaults 0 0 奇怪的是看log报错了 [rcS]: /etc/init.d/S09mountall.sh mount: mounting /dev/mmcblk0p1 on /mnt failed: No such
新路程------sil9135 hi3516a gpio功能确认
首先确认SCDT管脚 数据手册解释: 也就是hi3516端应该配置为in,这个pin用来表示有video进来,那么进来前后,pin的状态是如何变化的呢? 还有编程手册里 有寄存器可以读取这个SCDT的值,那么还要这个pin干什么呢?不太理解,以后解释 接下来是int pin,中断好配, hi3516a这边是gpio11_2,先看是否配成gpio /usr #
新路程------SN74CB3Q3257的选择
由于采用了SN74CB3Q3257 作为HDMI 音频和ALC5616音频信号选择器,不得不看看spec,spec218页 The SN74CB3Q3257 is a 4-bit 1-of-2 high-speed FET multiplexer/demultiplexer with a single output-enable (OE) input. The select (S) i
新路程------uboot环境变量没生效
之前刷文件系统一种出错,出错log如下 hisilicon # sf probe 0;mw.b 0x82000000 0xff 0x1800000;tftp 0x82000000 rootfs_ucl ibc_64k.jffs2;sf erase 0x500000 0x1800000;sf write 0x82000000 0x500000 0x1800000 32768 KiB h
新路程------linux内核和busybox配置ulimit使能core dump
今天学习了如何配置内核和busybox使能coredump 首先内核确认CONFIG_ELF_CORE=y 然后busybox确认FEATURE_INIT_COREDUMPS [=y] 然后到内核根目录下执行~ # touch /.init_enable_core生成这个文件 然后把busybox 拷贝进/usr目录 执行 ./busybox sh -c 'ulimit -c un
新路程------rtl8188的配置
runwpa文件 #!/bin/bash if [ "`which iwconfig`" = "" ] ; then 如果运行which iwconfig的结果为空则输出下面的提示 echo "WARNING:Wireless tool not exist!" echo " Please install it!" exit else if [ `uname -r | cu
新路程------hi3516a 内置rtc调试
这个文章写得很全http://blog.csdn.net/qq_29350001/article/details/52681621,这里记录一下测试的内容 到sdk的package/drv/rtc目录下编译rtc_test.c 然后把编译好的可执行文件放到板子文件系统里去,chmod给个权限 1.确认时间设置成功 先设置再读回 /usr # ./matt -s time 2017/8/2
求小球落地5次后所经历的路程和第5次反弹的高度
#include<bits/stdc++.h>using namespace std;int main(){int n;while(cin>>n){double d=n*1.0;double h5=d/2/2/2/2/2;double sum=d+d+d/2+d/2/2+d/2/2/2;cout<<sum<<endl<<h5<<endl;}return 0;}

记录一次成功爬取知音漫客漫画的辛酸路程(js逆向解析)
一,首先漫画的搜索,漫画每章节的标题,每章节的图片数量,这些东西都是最基础的数据,直接使用get方法就可以得到。 二,对于付费章节来说,每张图片的src链接都是使用js加密的。熟悉js的应该可以很简单就解析出来(本人完全小白,花费了很长时间解析,主要是走了很多弯路)。以下就是js解析的过程。 (1)获取章节源码: 1,使用requests.get()直接获取,然后分析获取到的数据,我们发现:

滴滴7分钟路程收1414元事件:软件测试工程师的反思与启示
近日,一名上海网友在滴滴小程序发现了一条2017年的未支付信息。订单详情为2公里左右的行程,7分钟的时长,却显示付款1414元。 此次事件在滴滴客服回复“正常,支付就行”后,发酵到了热搜上,对滴滴平台的信誉造成了很大的影响。 随后,滴滴出行官微做出了回应:初步判断是当时司机误输入2遍导致。 虽然这可能只是一场人为的Bug,但仍然可以给软件测试工程师提供了一个学习的机会。以下是从这一事
【学习AI-相关路程-工具使用-自我学习-Ubuntucudavisco-开发工具尝试-基础样例 (2)】
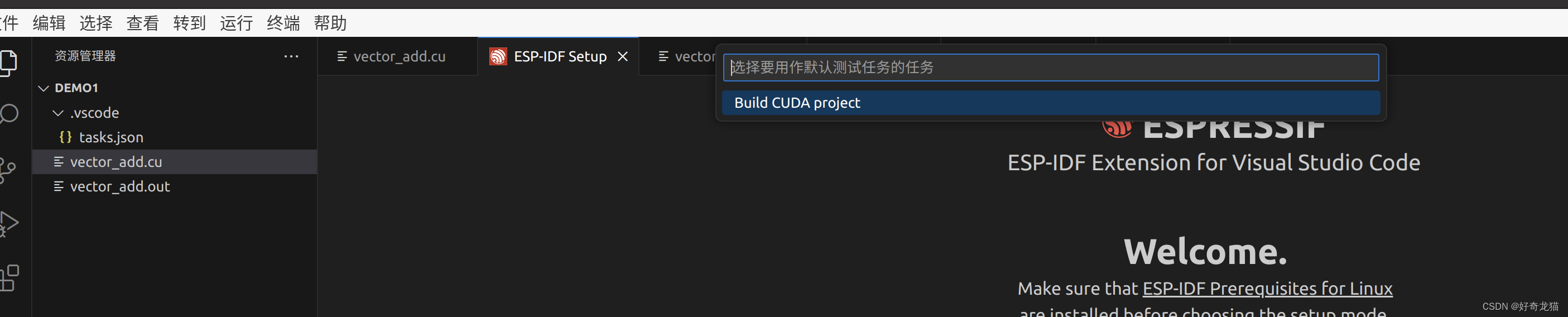
【学习AI-相关路程-工具使用-自我学习-cuda&visco-开发工具尝试-基础样例 (2)】 1、前言2、环境说明3、总结说明4、工具安装0、验证cuda1、软件下载2、插件安装 5、软件设置与编程练习1、创建目录2、编译软件进入目录&创建两个文件3、编写配置文件5、编写代码文件6、调试&验证7、代码解读(1)包含头文件和定义CUDA内核(2)主函数内的变量定义和内存分配(3)初始化向
【学习AI-相关路程-工具使用-自我学习-cudavisco-开发工具尝试-基础样例 (2)】
【学习AI-相关路程-工具使用-自我学习-cuda&visco-开发工具尝试-基础样例 (2)】 1、前言2、环境说明3、总结说明4、工具安装0、验证cuda1、软件下载2、插件安装 5、软件设置与编程练习1、创建目录2、编译软件进入目录&创建两个文件3、编写配置文件5、编写代码文件6、调试&验证7、代码解读(1)包含头文件和定义CUDA内核(2)主函数内的变量定义和内存分配(3)初始化向
【学习AI-相关路程-工具使用-NVIDIA SDK MANAGER==NVIDIA-jetson刷机工具安装使用 】
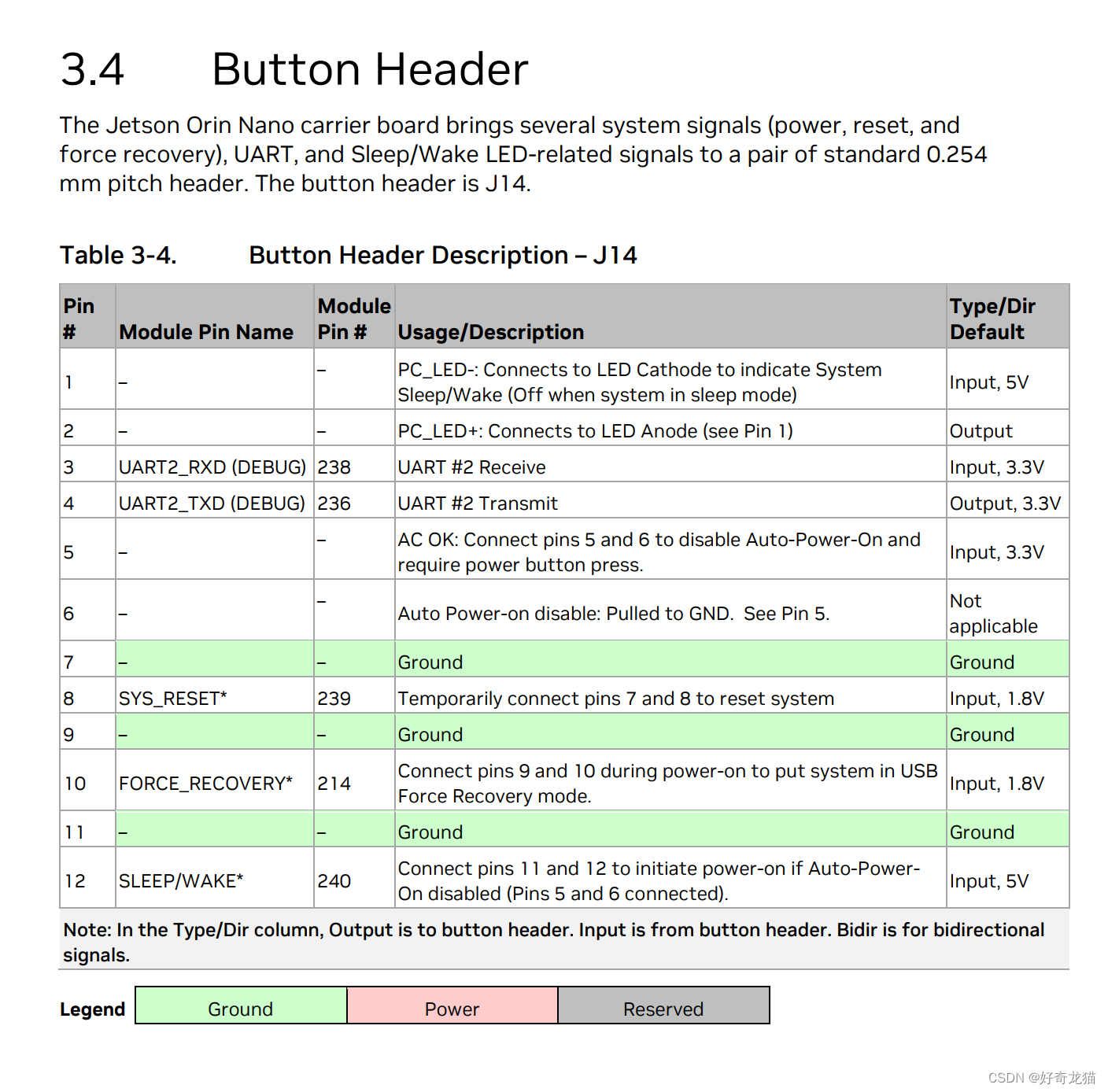
【学习AI-相关路程-工具使用-NVIDIA SDK manager-NVIDIA-jetson刷机工具安装使用 】 1、前言2、环境配置3、知识点了解(1)jetson 系列硬件了解(2)以下大致罗列jetson系列1. Jetson Nano2. Jetson TX23. Jetson Xavier NX4. Jetson AGX Xavier5. 其他系列:Jetson Orin系列
黑马程序员-两月学习路程
---------- android培训 java培训 期待与您交流!------------ 最初的什么都是好奇心,最开始学的计算机基础,基础的嘛,课上的很快,最后接触了常用dos命令, 后来觉的时间紧,这样耗下去不行,就开始看传智
Pytorch 学习路程
目录 下载Pytorch 入门尝试 几种常见的Tensor Scalar Vector Matrix AutoGrad机制 线性回归尝试 使用hub模块 Pytorch是重要的人工智能深度学习框架。既然已经点进来,我们就详细的介绍一下啥是Pytorch PyTorch 希望将其代替 Numpy 来利用 GPUs 的威力; 一个可以提供更加灵活和快速的深度学
H264学习方法-心历路程-资料搜集
我的H.264学习历程 半年前,我知道了H.264这个名词。那个时候决定学习H.264,可是我连资料都不知道如何收集。而且整个学校就只有我一个人在学习H.264, 找不到人交流,所以那个时候学得真的是举步维艰,很痛苦,而能在网上认识一个学习H.264的同志真的是一件让我很高兴的事。 后来慢慢在网上找到了一些介绍H.264的文章,当然也找到了peter李的网站