触觉专题
Geomagic Touch触觉力反馈设备,在虚拟环境中提供真实的反馈力
在虚拟现实(VR)和增强现实(AR)技术日益成熟的今天,为用户提供更加真实、沉浸的交互体验成为了技术发展的重要方向。Geomagic Touch触觉力反馈设备凭借其卓越的性能和广泛的应用领域,成为了这一领域中的佼佼者。本文将探讨Geomagic Touch如何在虚拟环境中提供真实的反馈力,为用户带来前所未有的体验。 卓越的力反馈技术 Geomagic Touch(原Sensable Phant

Nature Communications:解码人类触觉感知与运动神经控制机理,用仿生手重现类人触觉感知与抓握
近日,由曼彻斯特大学、牛津大学、吉林大学、索尔福德大学等多所机构组成的国际研究团队,在Nature Communications期刊上发表了一篇重要研究成果,题为Human tactile sensing and sensorimotor mechanism: from afferent tactile signals to efferent motor control。该研究首次结合人体神经传导

Ultrahaptics公司为Holodeck型触觉关闭了2300万美元的资金回合
(VR开发网2017年5月4日讯)Ultrahaptics成立于2013年,专注于提供触觉反馈的技术,无需佩戴或触摸任何类型的设备。它使用超声波将感觉投射到用户身上,从而感受到按钮和物体,被称为“中空触觉”。随着最近的B系列资金投入2300万美元,该公司将在全球扩张,并启动VR和AR行业。 中空触觉技术目前有三种形式,关于每一种形式的更多的信息可以在其网站上找到。 首先,他们有机会通过学术计划将

搜维尔科技:SenseGlove虚拟训练、VR/AR 模拟和研究中的触觉反馈
训练 传统培训成本高昂且风险大,需要重复资产或停产。在培训中使用虚拟现实可以轻松解决这些问题。借助 SenseGlove,终于可以研究和评估与传统培训效果相同的虚拟培训技术。体验低成本的定制 VR 培训,同时保留现实世界的肌肉记忆和记忆力。 模拟和建模 借助 SenseGlove,与数字模型的交互变得与物理模型的交互类似。评估您的设计是否符合人体工程学,用 VR 或 AR 模拟制造过
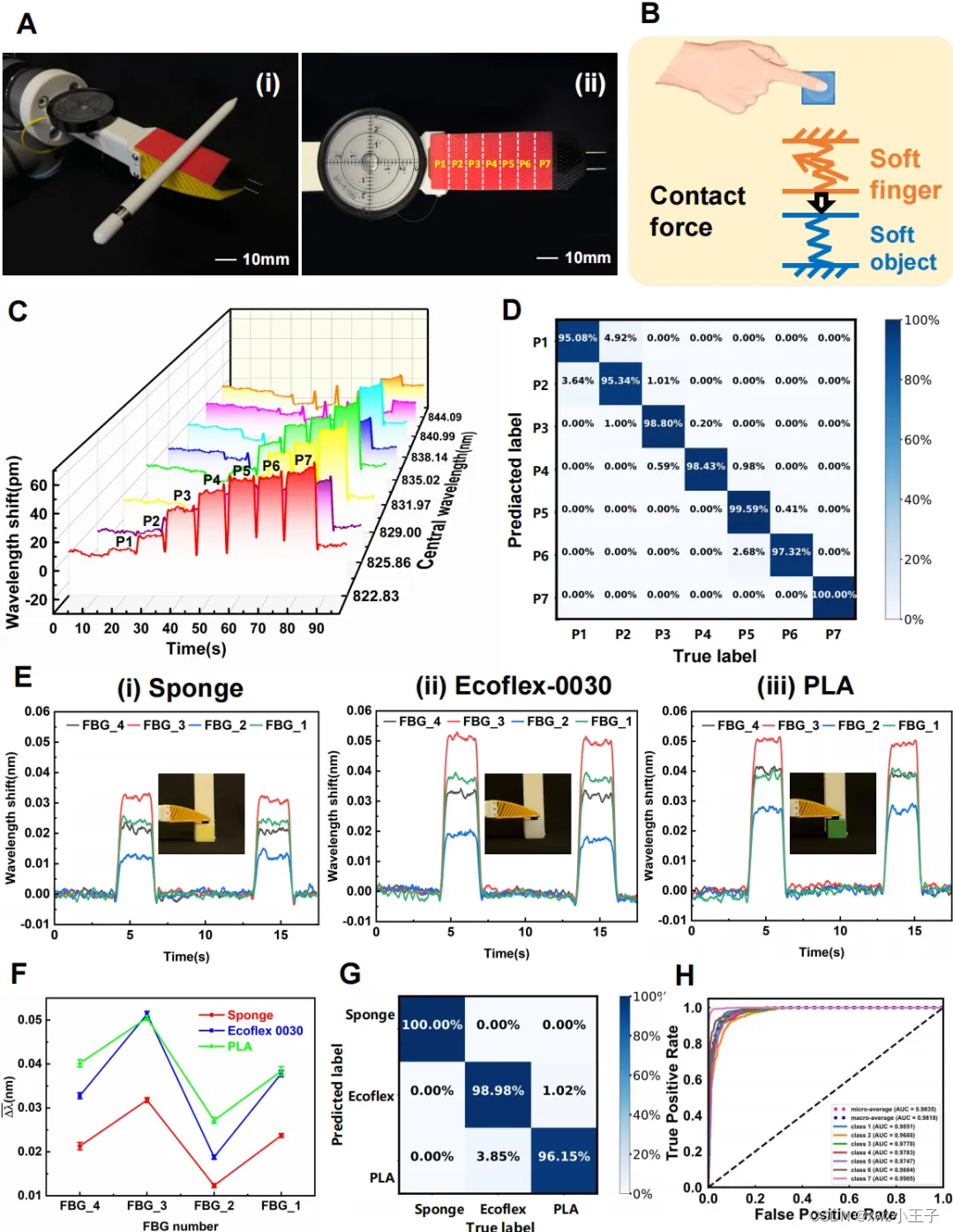
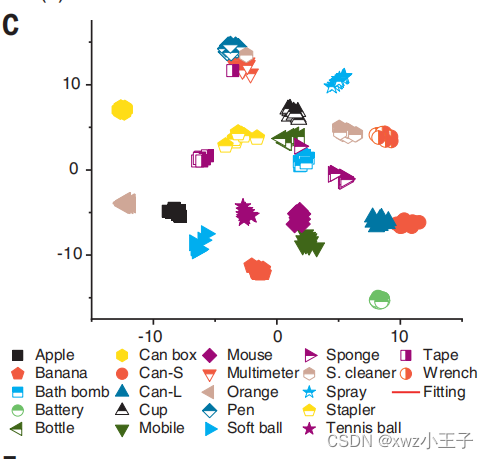
Advanced Intelligent Systems 清华大学曲钧天团队设计了基于光纤传感技术的多模态触觉感知仿生机械手
随着软体机器人技术的发展,触觉感知在人机安全交互、可穿戴设备和医疗器械领域发挥着重要作用。如何用简单的系统集成更多的触觉感知、获取更多交互信息面临着诸多挑战。 近日,清华大学国际研究生院曲钧天助理教授团队在国际期刊Advanced Intelligent Systems上发表以“A Bioinspired Robotic Finger for Multimodal Tactile Sensing
Science刊发!乌普萨拉大学最新神经形态触觉人造皮肤可快速精准识别物体
当前,人形机器人使用的传统电子皮肤在处理触觉感知信息方面的能力并不强,尤其是在时间信息编码和快速特征提取方面存在一定的局限性。简单来说就是机器人无法完成在接触到物品的瞬间,判断用怎样的力度去对该物品做出反应。尽管多模态大模型和视觉语言模型致力于提高人形机器人的触觉感知力,但是和人类的五感能力对比仍然相形见绌。这一点是神经机器人领域亟待突破的瓶颈。 近日,乌普萨拉大学电气工程系的张志斌、陈立波教授

搜维尔科技:使用Touch 触觉力反馈设备,用户可以完全沉浸在培训模拟、神经康复或远程的机器人操控中
使用Touch 触觉力反馈设备,用户可以完全沉浸在培训模拟、神经康复或远程的机器人操控中 搜维尔科技:使用Touch 触觉力反馈设备,用户可以完全沉浸在培训模拟、神经康复或远程的机器人操控中

搜维尔科技:介绍下Manus的OptiTrack 手套,体验精致的每指触觉!
搜维尔科技:介绍下Manus的OptiTrack 手套,体验精致的每指触觉! 搜维尔科技:介绍下Manus的OptiTrack 手套,体验精致的每指触觉!
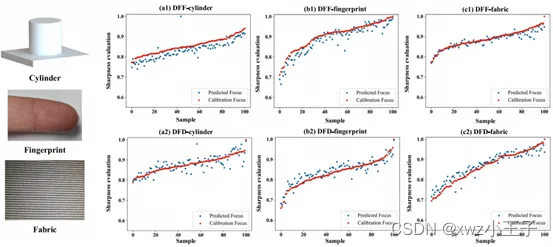
Sensors and Actuators A: Physical 改进成像调节系统的视触觉传感器
基于视觉的触觉传感器(VTS)的成像鲁棒性取决于涂层的耐磨性和成像稳定性。随着传感器的小型化,有限的成像空间无法对接触深度变化引起的成像偏差提供缓冲。 本文提出了一种改进的基于视觉的薄触觉传感器(VTTS), 又称基于视觉的触觉皮肤,其集成了可调焦相机和成像调节系统(IAS),以提高成像鲁棒性。IAS包含成像校准系统和聚焦系统。由于视触觉传感是在相对稳定和封闭的成像环境中进行的,因此基于图像的聚


具身触觉社区| “大咖面对面”第一期活动顺利举行
4月27日,由中国人工智能学会认知系统与信息处理专委会组织的“具身触觉社区”第一期“大咖面对面”分享活动顺利举行,我们邀请到了美国麻省理工学院(MIT)博士、视触觉传感器的奠基人、GelSight指尖传感器发明人李瑞老师为社区带来了非常精彩的报告!近200名来自高校、科研院所、工业部门等行业的同学、老师、专家学者参与了本次活动,并在讲座结束后与李瑞老师进行了热烈的交流。我们非常高兴地看到产学研各界
搜维尔科技:Senseglove Nova 数据手套触觉反馈测试
Senseglove Nova 数据手套触觉反馈测试 搜维尔科技:Senseglove Nova 数据手套触觉反馈测试
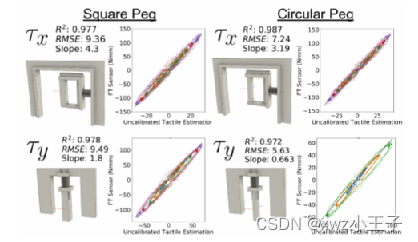
基于电磁激励原理利用视触觉传感器估计抓取力矩的方法
由于触觉感知能使机器人通过其触觉传递获取丰富的接触信息,触觉感知已经成为机器人机械臂的一种流行的感知方式。而在触觉传感器可获取的各种信息中,通过外界接触从抓取物体传递到机器人手指的力矩等信息,在完成各种指令的实现尤为重要。如图所示为通过触点丰富的USB棒插入对齐问题来演示本文所介绍方法。然而,相比于其他传感方式,如力、纹理或滑动识别,触觉力矩估计受到的关注相对较少。 在本文工作中,引入了触觉

助力各设备厂家矿鸿方案快速落地-触觉智能多款产品通过矿鸿认证
近日,触觉智能自主研发的多款产品:矿鸿核心板、本安矿鸿工业主板、矿鸿标准开发板、RK3568矿鸿控制器、本安矿鸿控制器、7寸矿鸿工控屏、10.4寸矿鸿工控屏、12.1寸矿鸿工控屏、15.6寸组态屏,10.1寸组态屏灯,通过矿鸿资质认证。 触觉智能,博硕团队,坚持高品质工业主板的研发与生产,为配合煤炭行业各设备厂家快速融入矿鸿生态,我们推出多款适合煤炭行业的产品并全部通过矿鸿认证,同时我们可以根据
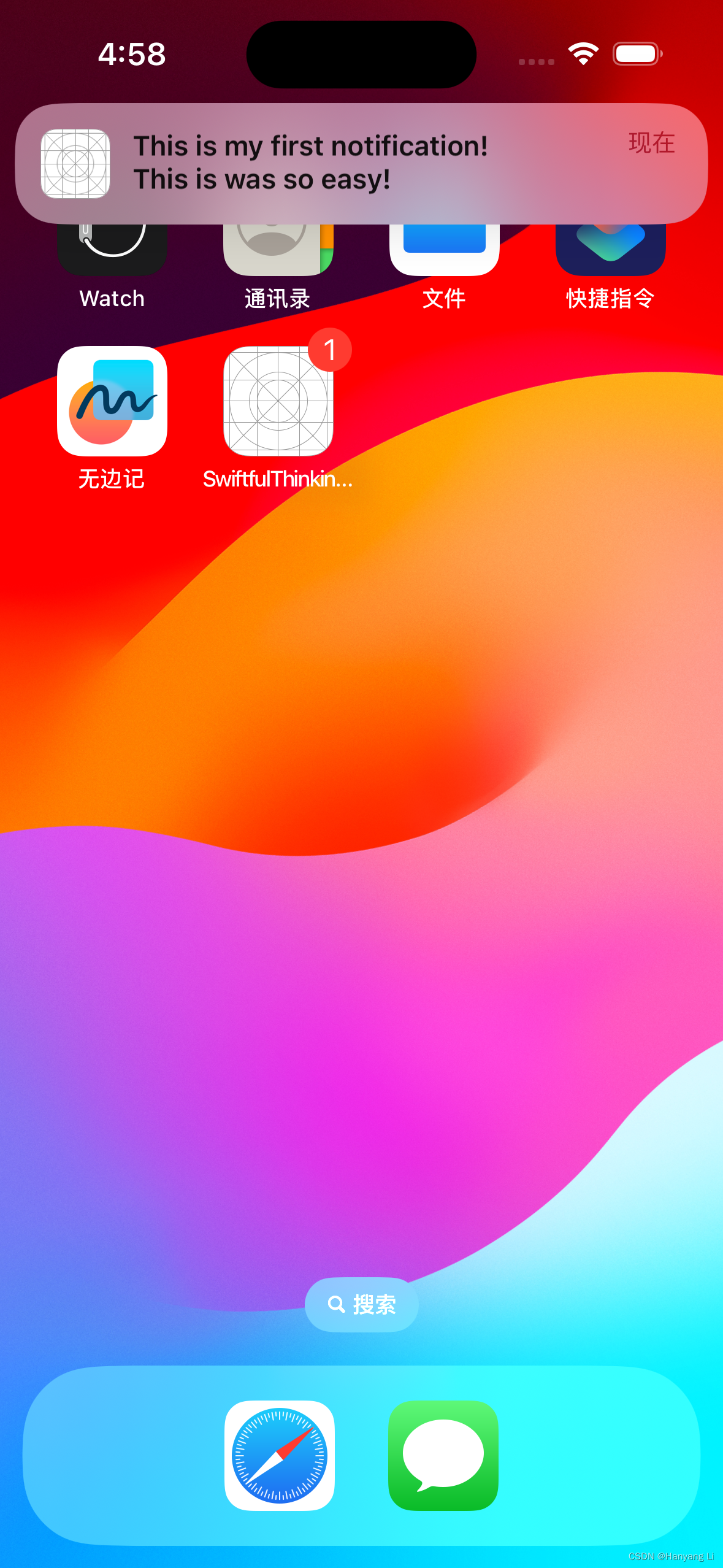
Sound/播放提示音, Haptics/触觉反馈, LocalNotification/本地通知 的使用
1. Sound 播放提示音 1.1 音频文件: tada.mp3, badum.mp3 1.2 文件位置截图: 1.3 实现 import AVKit/// 音频管理器class SoundManager{// 单例对象 Singletonstatic let instance = SoundManager()// 音频播放var player: AVAudioPla

软通动力赋能触觉智能打造嵌入式鸿蒙原生系统应用标杆
11月16日,由华为主办的生态伙伴赋能闭门交流会在鸿蒙之城深圳成功举办,触觉智能及众多企业伙伴、华为公司技术及运营专家与开发者朋友们,共同探讨鸿蒙原生应用和元服务带来纯国产化的创新应用变革。会议中,软通动力与深圳触觉智能科技有限公司签订战略协议,未来,软通动力将依托深厚的研发积累、强大的鸿蒙应用人才优势及丰富的行业实践经验,与触觉智能携手打造嵌入式鸿蒙原生系统应用标杆,共同“打造一切皆服务,万物可
android 禁用振动_如何在Android中禁用触觉反馈(或“轻按振动”)
android 禁用振动 When you tap certain items in Android, your phone will vibrate just a bit, giving you a little feedback. Sometimes, this is nice—getting that response is a nice acknowledgment that

iphone禁用提交按钮_如何在iPhone上禁用触觉反馈振动
iphone禁用提交按钮 The iPhone 7 and 8 don’t have a physical home button. Instead, the feel of pressing a button is recreated by what Apple calls the Taptic Engine. When you touch the home button, the

打造智慧矿山-触觉智能软通动力强强联合,助力矿鸿生态
2023年10月25-28日,两年一度的中国国际煤炭采矿技术交流及设备展览会在首都北京隆重召开,本届大会以“智能引领未来,绿色共享发展”为主题,作为国内煤炭行业的顶级盛会,由中国煤炭工业协会牵头举办的这次展出吸引了全世界的目光与关注。 触觉智能携手软通动力强强联合,作为智慧矿山的国产本安硬件+矿鸿系统方案提供商,携带了基于RK3568的本安矿鸿主板、矿鸿核心板、矿鸿开发板、RK3588矿

浙江大学利用 SVM 优化触觉传感器,盲文识别率达 96.12%
生物传感是人类与机器、人类与环境、机器与环境交互的重要媒介。其中,触觉能够实现精准的环境感知,帮助使用者与复杂环境交互。 为模仿人类的触觉,科研人员开发了各种传感器,以模拟皮肤对环境的感知。然而,触觉传感的要求高、参数变化多样,需要大量的研发经验、充分的文献调研和大量的试错实验,研发周期很长。 为此,浙江大学的研究者利用支持向量机进行摩擦电纳米发电机触觉传感器的参数优化。优化后的触觉传感器能够识

中国触觉传感器产业运行情况分析与投资规划研究报告2021-2027年版
第一章 触觉传感器相关介绍 1.1 触觉传感器相关原理及概念 1.1.1 人类触觉感知原理 1.1.2 触觉传感原理介绍 1.1.3 触觉传感器概念介绍 1.1.4 触觉传感器功能介绍 1.2 触觉传感器分类 1.2.1 压阻式触觉传感器 1.2.2 光传感式触觉传感器 1.2.3 电容效应式触觉传感器 1.2.4 磁导式触觉传感器 1.2.5 压电式触觉传感器 1.3 触觉传感器功能角度分类
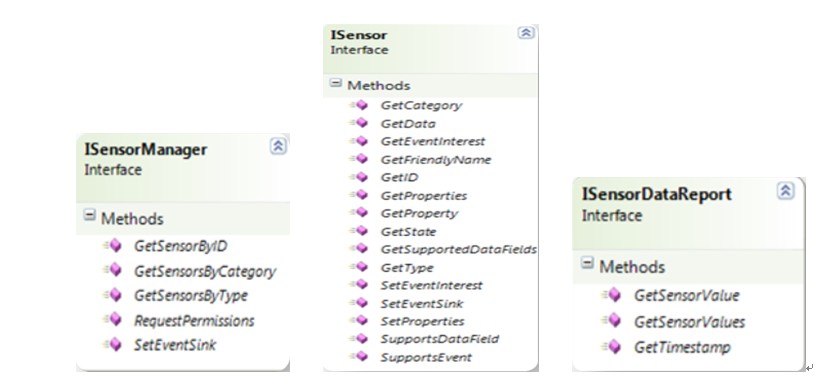
基于Visual C++2010与windows7 SDK开发传感器应用 触觉传感器,温度传感器等等
Windows 7操作系统提供了对传感器设备的内置支持。这包括对位置传感器的支持,如GPS设备。作为这种支持的一部分,Windows传感器和位置平台提供了一种设备制造的标准方法,以使软件开发商和客户能够正确感知传感器设备。同时,该平台为开发人员提供一个标准化的API和设备驱动程序接口(DDI)与传感器和传感器的数据协同工作。 传感器用于获取多种配置,从这个角度来看,几乎所有的东西,只要能
3d人体智能测试软件,神奇的3D触觉“电子皮肤”!人体监测“无侵入”,智能机器人“可感知”...
基于纳米复合材料薄膜的电子皮肤器件 SEM图像显示粗糙的结构不规则地分布在纳米复合材料的表面上,在整个上下表面上具有良好的一致性。激光扫描共聚焦显微镜测量的纳米复合材料表面高度分布数据和高度概率密度分布如图S2、S3所示。 结果表明,粗糙表面结构高度的概率密度分布近似符合高斯分布,平均值μ为39.15 μm,标准差σ为5.21 μm。 随着压力的增加,压阻复合材料的应变变大,有效杨氏模量变大。同
MIT发明10美元AI触觉手套:既能识别物体,又能称重
大数据文摘出品 编译:橡树_hiangsug、曹培信 对人类的感知觉能力(如视觉、听觉和触觉)的研究和复制往往取决于相关数据的可用性,数据集越大越丰富,模型的性能越高。 人工视觉和语音系统的进步依赖于深度学习模型,并且由无处不在的数字图像和语音音频数据库推动。 相比之下,由于将电子设备集成到柔性材料中的难度较大,触觉传感器(将物理接触刺激转换为可测量信号的设备)的发展受限。MIT人工智
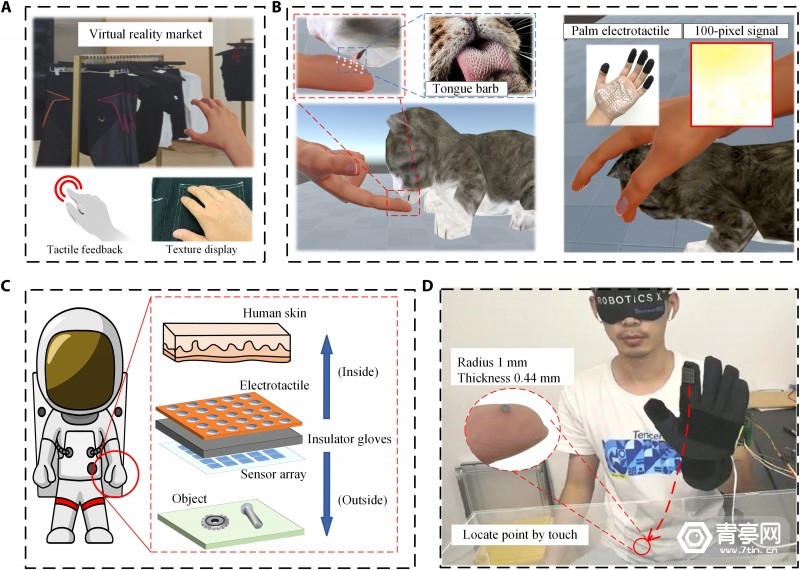
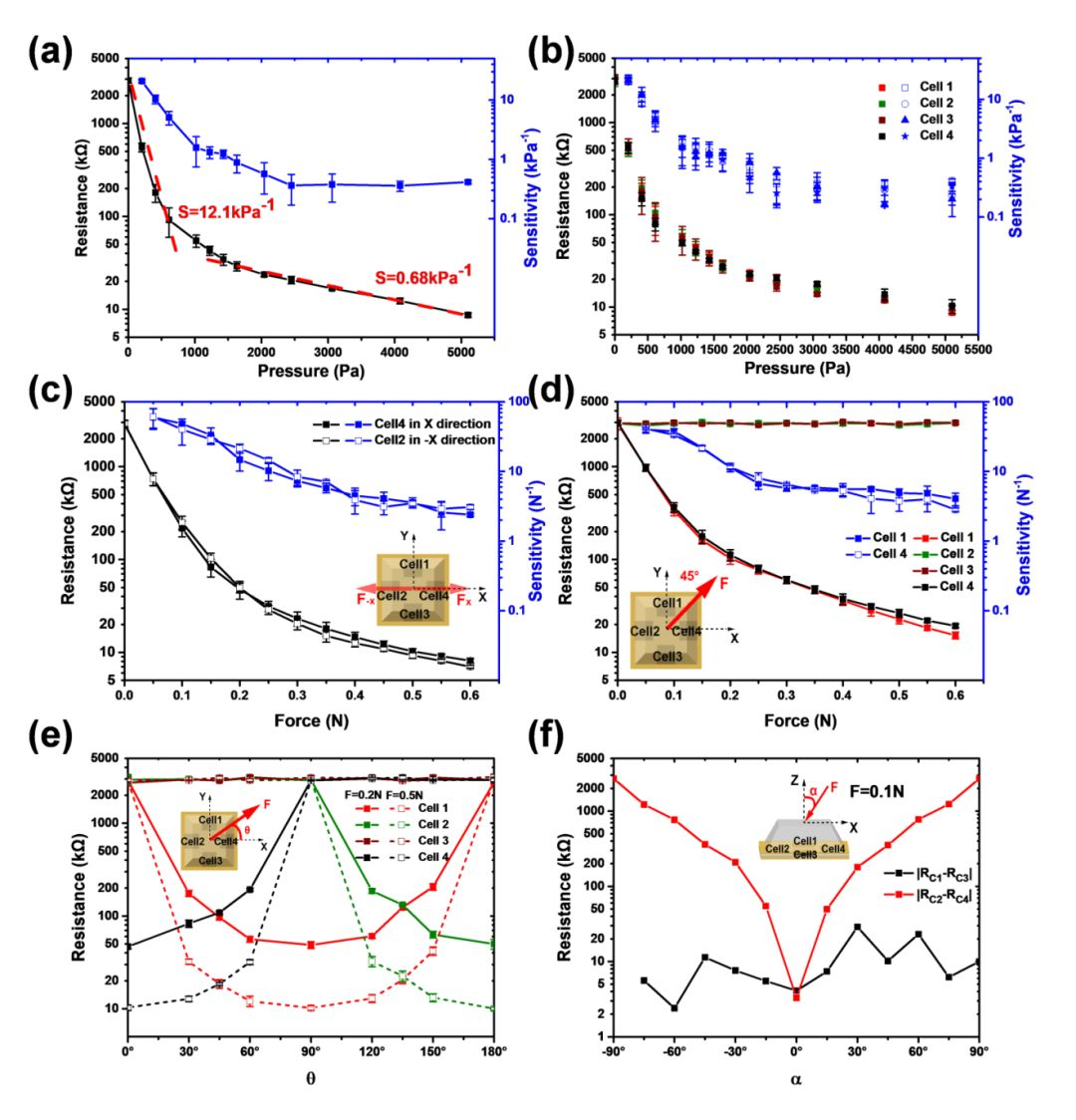
腾讯Robotics X Lab低电压电刺激触觉方案,单手指25个电极
关于体感手套的案例,青亭网曾经报道过许多种,有低成本的DIY阻力模拟手套,也有价格昂贵的启动微流体VR手套方案,或是基于SMA驱动器、SMI压力传感器的手套技术。但是,要模拟人类体感系统多样且敏感的触觉体验(毫米级空间分辨率、亚毫秒级时间精度),还有很长的路要走。此外,目前高端VR手套的体积较大,不便携,且不容易上手。 近期,香港城市大学(CityU)和腾讯Robotics X Lab合作研