规则化专题

机器学习中的正则化和范数规则化
正则化和范数规则化 文章安排:文章先介绍了正则化的定义,然后介绍其在机器学习中的规则化应用L0、L1、L2规则化范数和核范数规则化,最后介绍规则化项参数的选择问题。 正则化(regularization)来源于线性代数理论中的不适定问题,求解不适定问题的普遍方法是:用一族与原不适定问题相“邻近”的适定问题的解去逼近原问题的解,这种方法称为正则化方法。如何建立有效的正则化方法是反问题领域中不适定
机器学习中的范数规则化之 L0、L1与L2范数
原文:https://blog.csdn.net/zouxy09/article/details/2497199 今天我们聊聊机器学习中出现的非常频繁的问题:过拟合与规则化。我们先简单的来理解下常用的L0、L1、L2和核范数规则化。最后聊下规则化项参数的选择问题。这里因为篇幅比较庞大,为了不吓到大家,我将这个五个部分分成两篇博文。知识有限,以下都是我一些浅显的看法,如果理解存
【机器学习】范数规则化之——L0、L1与L2范数
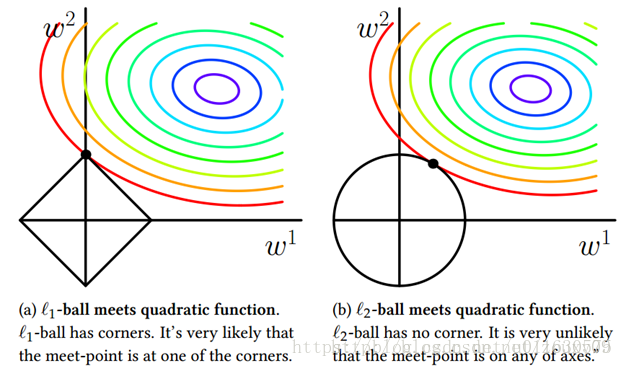
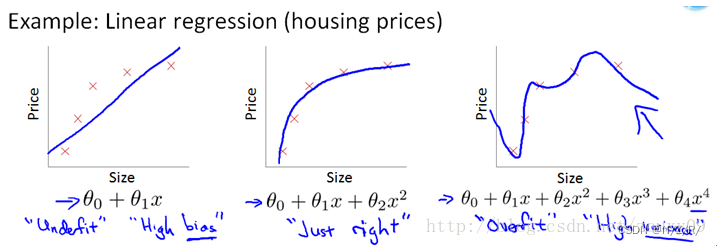
【机器学习】范数规则化之——L0、L1与L2范数 在机器学习领域中,我们通常求解模型的目标是“minimizeyour error while regularizing your parameters”,也就是在规则化参数的同时最小化误差。 最小化误差是为了让我们的模型拟合我们的训练数据,而规则化参数是防止我们的模型过分拟合我们的训练数据。因为参数太多,会导致我们的模型复杂度上升,容易过拟合,

In defence of the 8-point algorithm(八点算法的归一化(规则化)详解)基础矩阵
In defence of the 8-point algorithm 论文原文大家可以去网上自己下载,很好找的 在原论文中提出了归一化(初始化)输入参数,再进行八点法能够得到较好的匹配效果,算出修正的F矩阵。但是原文没有给出代码以及实现方法,这里本博客特地讨论一下这个问题。 本文主要解决的问题是图像坐标系的选择对八点法的影响。 整体影响的分析步骤: ①原图像坐标系设为u,转换成另外的坐标系变为

遥感图像建筑物提取后处理——轮廓规则化
对Toward Automatic Building Footprint Delineation From Aerial Images Using CNN and Regularization这篇文章进行了轮廓规则化的算法复现,效果如下。 代码我放在了GitHub上,地址为https://github.com/niecongchong/RS-building-regularization,好用别忘