测角专题

光电稳定云台中的稳定精度,测角精度,跟踪精度分别什么含义
光电稳定云台是一种利用光电传感器和精密控制系统来实现对目标的精确跟踪和稳定观察的设备。在光电稳定云台中,稳定精度、测角精度和跟踪精度是三个关键的性能指标,它们的含义和精度要求如下: 稳定精度: 稳定精度指的是云台在锁定目标后,保持目标在视场中静止不动的能力。这通常涉及到云台的抗扰动能力和对环境振动的抑制能力。稳定精度通常以角秒或毫弧度为单位,表示云台能够在多长时间内将目标保持在
现代雷达车载应用——第3章 MIMO雷达技术 3.3节 汽车MIMO雷达测角
经典著作,值得一读,英文原版下载链接【免费】ModernRadarforAutomotiveApplications资源-CSDN文库。 3.3 汽车MIMO雷达测角 在发射天线和接收天线分别为Mt和Mr的汽车MIMO雷达中,可以合成一个由Mt*Mr个阵元组成的虚拟ULA,单元间距为d。阵列响应可以写作: (3.5)

毫米波雷达测速测距测角
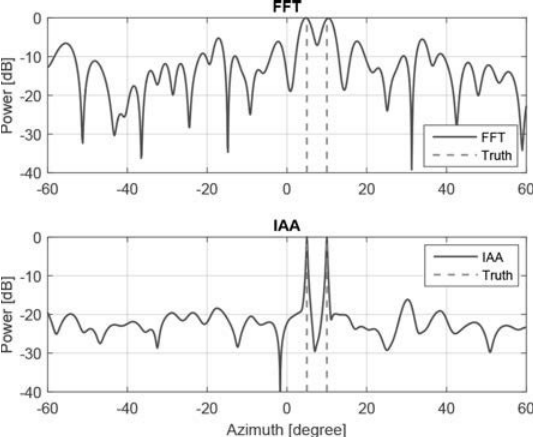
本文主要想讲解毫米波雷达FMCW调制中,测距、测速、测角中都使用FFT,其使用FFT得到的是什么东西。测距、测速、测角的方法原理网上资料很多,大家可以自己看看。 测距 想象我们正常一般怎么测距离,我们知道毫米波以光速C传播,如果前方有一物体,毫米波雷达发出波打到物体上返回,再被雷达接收,如果知道整个过程的时间T,那么,距离R=C*T/2(近似看成静止目标) 但是问题来了,这个时间T怎么测?我们可以

OpenCV零基础实战项目2:测角
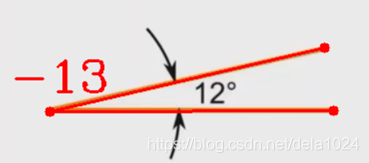
简述 主要任务:获取鼠标点击点的位置信息(第一个点是顶点),绘制两条线构成的夹角,计算夹角并显示出来。 其他功能:读取图片,展示图片,键入q清空坐标点,键入d销毁所有窗口。 目录 简述资源实现1. 获取点位置信息并显示2. 计算夹角3. 键入q清空坐标点,键入d销毁所有窗口 实际操作中的问题和注意事项完整代码与结果示意 资源 视频资源: (强推)OpenCV实战项目 图片