气压计专题
从APM源码分析GPS、气压计惯导融合
最近事多,忙着开源自研飞控,现主要工作基本已经完成,代码最迟下月中旬开放,博客来不及更新,还请各位见谅,后面会抽空多更的咯!!! 自研飞控靓照如下:主控STM32F103RCT6,IMU组合:MPU6050、IST8310(DJI同款磁力计、5883已停产)SPL06_001(歌尔最新高精度气压计),GPS:M8N输出PVT 为方便大家学习,飞控工程支持Keil 、IAR两款编译器
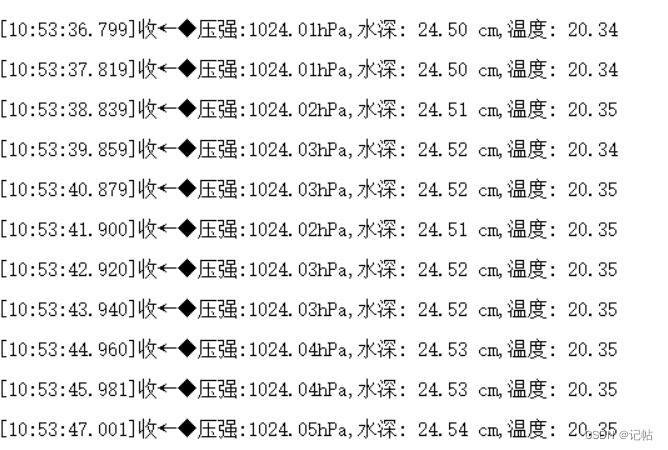
e2studio开发LPS28DFW气压计(2)----水压检测
e2studio开发LPS28DFW气压计.2--水压检测 概述视频教学样品申请完整代码下载水压计算设置速率和分辨率轮询读取数据测试结果 概述 本文将介绍如何使用 LPS28DFW 传感器来读取的压强数据,来估算水下深度,可以利用液体静压的原理。 最近在弄ST和瑞萨RA的课程,需要样片的可以加群申请:615061293 。 视频教学 https://www.bilibil

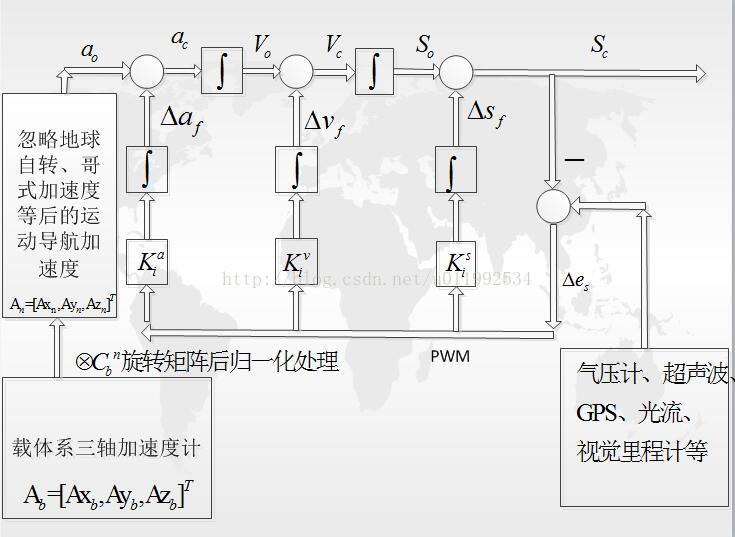
相当于IMU ,GPS,气压计,光流 这些都是作为观测器,起修正作用,可以建立观测方程。
相当于IMU ,GPS,气压计这些都是作为观测器,起修正作用,可以建立观测方程。 视觉里程计好像也是的。视觉里程计的频率也是低于IMU的,所以我有个疑问来了,视觉里程计和IMU的融合是不是和GPS和IMU的融合比较类似?当然是基于滤波的融合,不是基于优化的话。以前的基于EKF的VSLAM是不是这种思路? VSLAM里面观察到特征点也应该是一种观测,就像高翔这里说的, 一种是蒙着眼睛走