本例专题

通过 MATLAB 的 cylinder 函数生成圆柱体的表面坐标,生成表示一个具有非标准形状的圆柱体(在本例中是杯子)
MATLAB的机器人系统工具箱(RST)的官方例程Plan a Reaching Trajectory with Multiple Kinematic Constraints规划具有多个运动学约束的到达轨迹 % 创建用于视觉化杯子的点[X,Y,Z] = cylinder(cupRadius*linspace(0,1,50).^0.125);% 调整 Z 坐标的比例,使其符合杯子的高度Z

hive输出格式转化,本例以json为例
hive默认是以tab为分隔符,分隔各个输出字段,如 hive> select get_json_object(json.value,'$.hour'),get_json_object(json.value,"$.channel") from json limit 10; Total MapReduce jobs = 1 Launching Job 1 out of 1 Nu

本例演示如何在数据周围绘制一个带标题的框。
<html><body><fieldset><legend>健康信息:</legend><form><label>身高:<input type="text" /></label><label>体重:<input type="text" /></label></form></fieldset><p>如果表单周围没有边框,说明您的浏览器太老了。</p></body></html>
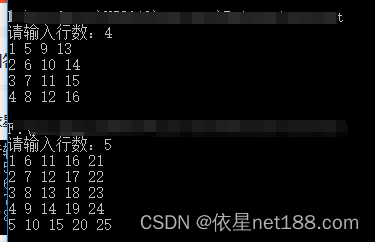
c语言,输入整数n(行数,本例为4),按照如下规则打印数字图片 1 5 9 13 2 6 10 14 3 7 11 15 4 8 12 16
c语言,输入整数n(行数,本例为4),按照如下规则打印数字图片 1 5 9 13 2 6 10 14 3 7 11 15 4 8 12 16 以下是使用C语言编写的程序,根据输入的行数打印数字图片的规则: #include <stdio.h>int main() {int n;printf("请输入行数:");scanf("%d", &n);int num = 1;for (int

批处理,修改文件后缀名,本例是将.txt改为.m文件
::修改 SET old=.txt SET new=.m ::还原 ::SET new=.TXT ::SET old=%old%%COMPUTERNAME% ::文件列表 SET list=%old%.VAB :::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::