无名专题

Linux | 进程池技术解析:利用无名管道实现并发任务处理(含实现代码)
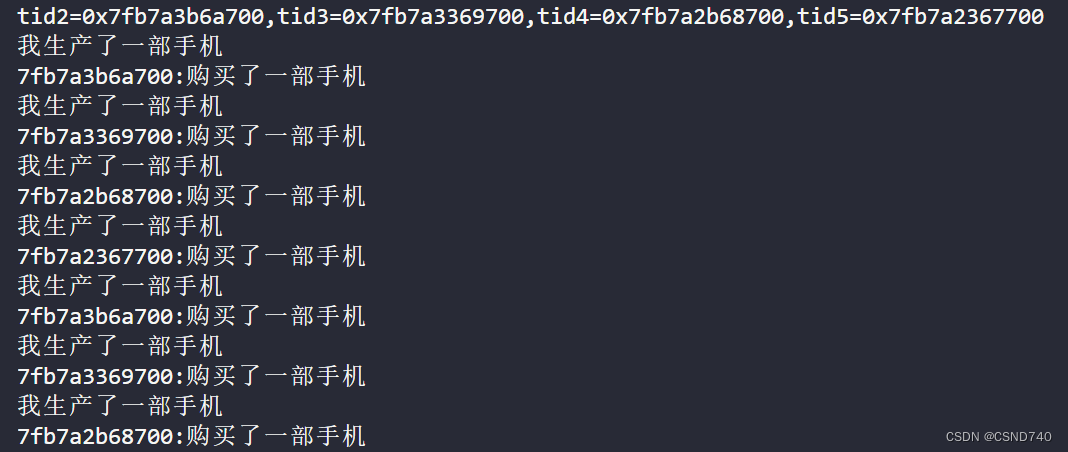
在血海里游泳,一直游到海水变蓝。——何小鹏 2024.8.31 目录 一、进程池 二、使用匿名管道实现进程池的核心 前置知识:管道的四种情况和五个特征 三、代码实现 四、实现代码详解 main() 2、loadTask() 3、channelInit() 问题:为什么要将子进程的管道读端重定向至标准输入? 4、ctrlProcess() 5、channelClose(

线程间通信方式(互斥(互斥锁)与同步(无名信号量、条件变量))
1通信机制:互斥与同步 线程的互斥通过线程的互斥锁完成; 线程的同步通过无名信号量或者条件变量完成。 2 互斥 2.1 何为互斥? 互斥是在多个线程在访问同一个全局变量的时候,先让这个线程争抢锁的资源,那个线程争抢到资源,它可以访问这个变量,没有争抢到资源的线程不能够访问这个变量。那这种只有一个线程能够访问到这个变量的现象称之为线程间互斥。 2.2互斥锁API 1.

无名创新开源飞控利用GPS数据航向对准开源代码
无名创新开源飞控利用GPS数据航向对准开源代码: #define acc_sync_cnt 5 void GPS_Azimuth_Update_Method1(uint8_t flag) { if(flag==0) return; //下面利用到角公式求解误差方位角,先方位角误差正切值 float x1=0,y1=0,x2=0,y2=0,molecule=0,denomi
无名创新——2019年TI杯电赛飞行器赛题关键问题汇总
从2018年12月以来,无名创新TI飞控累计服务了全国高校累计超400个电赛飞行器学生团队,无名创新TI系列产品根据客户反馈、市场需求,完成了一次次软硬件迭代升级,比赛临近,针对近期客户担心是否能直接采用成品TI飞控开发板、TI整机二次开发学习平台用于比赛问题,下面给出客户提出的几种可能的情况,在展开讨论前,我们先列出前两年飞行器赛期的赛题要求。 无名创新客户获奖战报 无名创新TI飞控开源

无名创新无人机调试架——多旋翼调试平台(萌新炸机终结者)
产品说明: 无名创新无人机调试架适用机型范围主要为F330、F450、S500也可以兼容轴距在500mm以内的各种机型,适用更大轴距的飞机需要定制!调试架支撑框架采用的是国标工业铝型材,强度高,结构稳定,满足单轴调试和全向调试的烤四轴稳定要求。单轴调试轴承组件选用橡胶防尘密封设计,旋转摩擦系数低,减小调试误差。自主设计全向轴3D打印零件,结构稳定可靠,满足进阶玩家的全向调试要求,最大调试倾角可达

飞控学习从入坑到放弃心路历程 ——————致敬无名小哥
大一开始接触单片机,一个老乡带我进入的学校实验室,然后开始学习c语言,51单片机,做了一个蓝牙小车,大一暑假电赛老师做的高频题目,一脸懵逼,后面师兄建议我学习下32,我记得当时老师来了一句你明天是不是就要学64了,感觉当时很无语,(老师貌似喜欢做硬件的)还是一边玩一边学了下32,后面电赛测试的时候就没去了,因为什么都没做出来,也是当时才知道原来有无人机的控制题目可以选,但是老师并不同意我们
无名科创开源飞控公告
无名科创开源飞控公告 感谢您选择了无名科创,对飞控学习而言,国外商业级飞控APM、PX4/Pixhawk、Autoquad等平台不适合初学者入门学习。而国内传统飞控如Crazepony、ANO、Light、INF等随着创始者们相继毕业,工作时间紧,代码缺乏更新(涉密),以及技术支持不及时等,随着飞控整个行业的技术成熟,对从业者的要求越来越高,在国内开源飞控“青黄不接”的当下,我们无名科创团队成立
无名管道与有名管道通讯编程
管道通讯:一个进程在管道的尾部写入数据,另一个进程从管道的头部读出数据。管道包括无名管道和有名管道两种,前者只能用于父进程和子进程间的通信,后者可用于运行于同一系统中的任意两个进程间的通信。 管道通讯的特点: 1. 管道通讯是单向的,有固定的读端和写端。 2. 数据被进程从管道读出后,在管道中该数据就不存在了。 3. 当进程去读取空管道的时候,进程会阻塞。 4. 当进程往满管道写入数据时

Linux系统编程- 无名管道(匿名管道)
无名管道作为Linux进程间通讯,我们这里把理论和实际结合起来说明。 1.什么是管道 管道,英文位pipe,在学习linux系统编程一个重要概念.它的发明人是道格拉斯.麦克罗伊,这位也是UNIX上早期shell的发明人。他在发明了shell之后,发现系统操作执行命令的时候,经常有需求要将一个程序的输出交给另一个程序进行处理,这种操作可以使用输入输出重定向加文件搞定,比如: 输入以下命令行:

【Conda】解决无名虚拟环境问题
文章目录 问题描述:无名虚拟环境解决步骤1 添加虚拟环境目录到envs步骤2 成功命名 问题描述:无名虚拟环境 如果不指定创建目录,默认创建在C盘用户目录下,这应该是很多人不愿意的吧。 指定目录创建虚拟环境命令如下: conda create --prefix=F:/APP/Conda_Envs/wh_city python=3.7 但是,使用上述命令创建的虚拟环境

【Linux C | 多线程编程】线程同步 | 信号量(无名信号量) 及其使用例子
😁博客主页😁:🚀https://blog.csdn.net/wkd_007🚀 🤑博客内容🤑:🍭嵌入式开发、Linux、C语言、C++、数据结构、音视频🍭 🤣本文内容🤣:🍭介绍 🍭 😎金句分享😎:🍭你不能选择最好的,但最好的会来选择你——泰戈尔🍭 ⏰发布时间⏰: 本文未经允许,不得转发!!! 目录 🎄一、概述✨1.1 二值信号量、计数信号量✨1.2
linux 创建并使用 无名管道 / 有名管道
父进程 通过 fork() 的方式 把管道的读端和写端传递给 子进程 #include <stdio.h>#include "stdlib.h"#include "unistd.h"int main() {int fd[2];if (pipe(fd) < 0) {perror("Fail to create pipe");exit(EXIT_FAILURE);}/*** create c
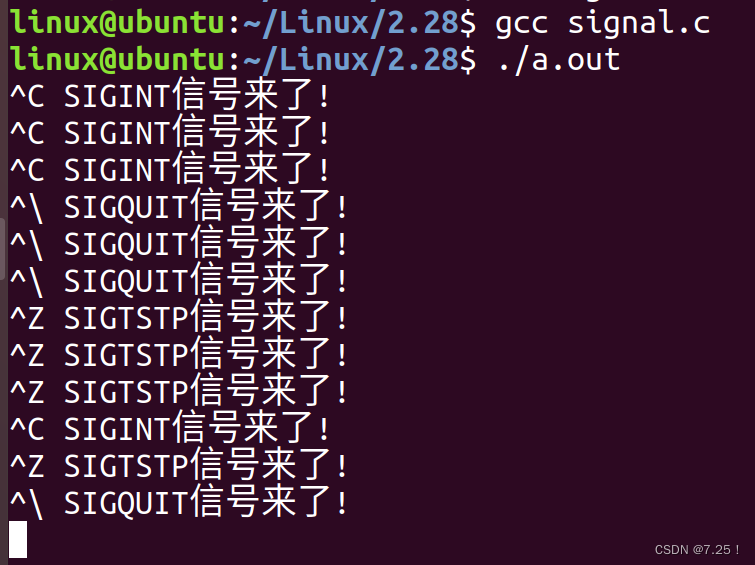
进程间通信,无名管道pipe,有名管道mkfifo,信号的基础概念,signal函数
我要成为嵌入式高手之2月28日Linux高编第十一天!! 学习笔记 进程间通信 总共6种通信方法,主要是前五种方式 第一种方式:管道 一、无名管道 只能用于具有亲缘关系的进程间通信 pipe #include <unistd.h> int pipe(int pipefd[2]); 功能:创建一个无名管道 参数: pipefd[0]:读 p
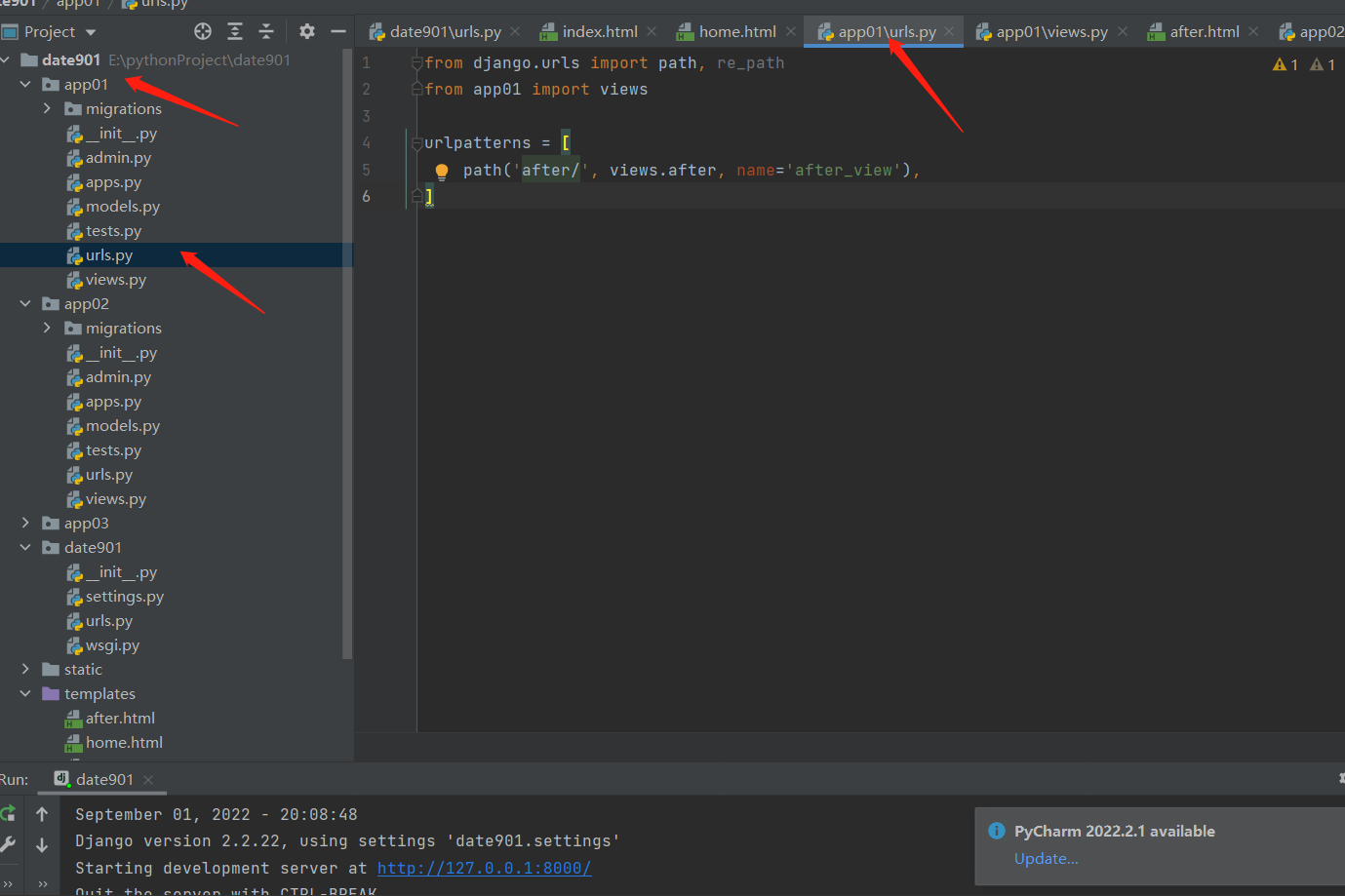
django请求生命周期流程图,路由匹配,路由有名无名反向解析,路由分发,名称空间
django请求生命周期流程图 浏览器发起请求。 先经过网关接口,Django自带的是wsgiref,请求来的时候解析封装,响应走的时候打包处理,这个wsgiref模块本身能够支持的并发量很少,最多1000左右,上线之后会换成uwsgi,并且还会加nginx。 往后就到Django框架了,先经过中间件,中间件处理请求。 再到路由层做路由匹配和分发。 然后到视图层进行业务处理,O


Nginx的优化与防盗链,无名宵小速速退让!
目录 1. Nginx隐藏版本号1.1 修改配置文件1.2 修改源码 2. 修改用户和组3. 设置缓存时间4. 日志分割5. 实现连接超时6. 更改进程数7. 网页压缩8. 盗链与防盗链8.1 盗链8.2 防盗链 9. FPM模块参数优化 1. Nginx隐藏版本号 1.1 修改配置文件 [root@client ~]# curl 192.168.152.129[root@c
linux 管道写文件,linux中用无名管道进行文件的读写
1管道是什么: 水管子大家知道,有两端,在此一端用来读一端用来写,其中一端的输出作为另外一端的输入。 2 函数原型 int pipe(int pipefd[2]);//参数中分别代表的两端 3 例子:管道一端作为写 另外一端作为读 父子进程实现 #include #include #include int main() { pid_t pid; int temp; int pipedes[
Linux中有名管道和无名管道
无名管道基础 进程间通信介绍 常用通信方式 无名管道(pipe) 有名管道 (fifo) 信号(signal) 共享内存(mmap) 套接字(socket)过时的IPC通信方式 System V IPC 共享内存(share memory) 消息队列(message queue) 信号灯集(semaphore set)无名管道 无名管道注意事项: 只能用于亲缘关系的进程间通信(父子进程,兄弟进程

进程间的通讯--管道(有名、无名)
进程间的通讯–管道(有名、无名) 管道pipe:管道是一种半双工的通信方式,数据只能单向流动,而且只能在具有亲缘关系的进程间使用。进程的亲缘关系通常是指父子进程关系。(无名管道) 【命名管道FIFO:有名管道也是半双工的通信方式,但是它允许无亲缘关系进程间的通信。】 管道 1、特点: 它是半双工的(即数据只能在一个方向上流动),具有固定的读端和写端。 它只能用于具有亲缘关系的进

难过。。。是因为一支无名的小鸟还是其它等等等等??
这些日子,我不是一些屁话也憋不出,只是难过,煎熬,无助,困惑,进退两难围绕着我。 那个我还没给起名字的生了三个蛋的小鸟,在初三的晚上或是初四的凌晨永远的离开了我,我却连它最后一面也没有见上。不让我看见它僵硬的身子,或许也是一种恩惠,看着小动物的死亡却无力挽回是非常残酷的事。我埋怨爸爸没有好好埋葬它。 错过的事永远不要说后悔,说了也于事无补,原本我想好了在农历新年一始给它拍些PP,天公很作媒,我却

Linux管道学习(无名管道)
目录 1、概述 2、管道的创建 3、管道读写行为 3.1、管道读 在linux中管道有两种,一是无名管道(匿名管道),第二种是有名管道;无名管道主要用于有血缘关系的父子进程间通信,有名管道则不受该限制,可用于任意进程之间的通信;这里我们主要学习无名管道。 1、概述 创建无名管道的函数如下: #include <unistd.

萌新卷妹带你逃出算法无名岛第一站
萌新卷妹带你逃出算法无名岛第一站 👩💻博客主页:京与旧铺的博客主页 ✨欢迎关注🖱点赞🎀收藏⭐留言✒ 🔮本文由京与旧铺原创,csdn首发! 😘系列专栏:java学习 👕参考网站:牛客网 💻首发时间:🎞2022年9月3日🎠 🎨你做三四月的事,八九月就会有答案,一起加油吧 🀄如果觉得博主的文章还不错的话,请三连支持一下博主哦 🎧最后的话,作者是一个新人,在很多方面还做

现在明白为什么无名博客里好几篇文章在讲传感器的滞后
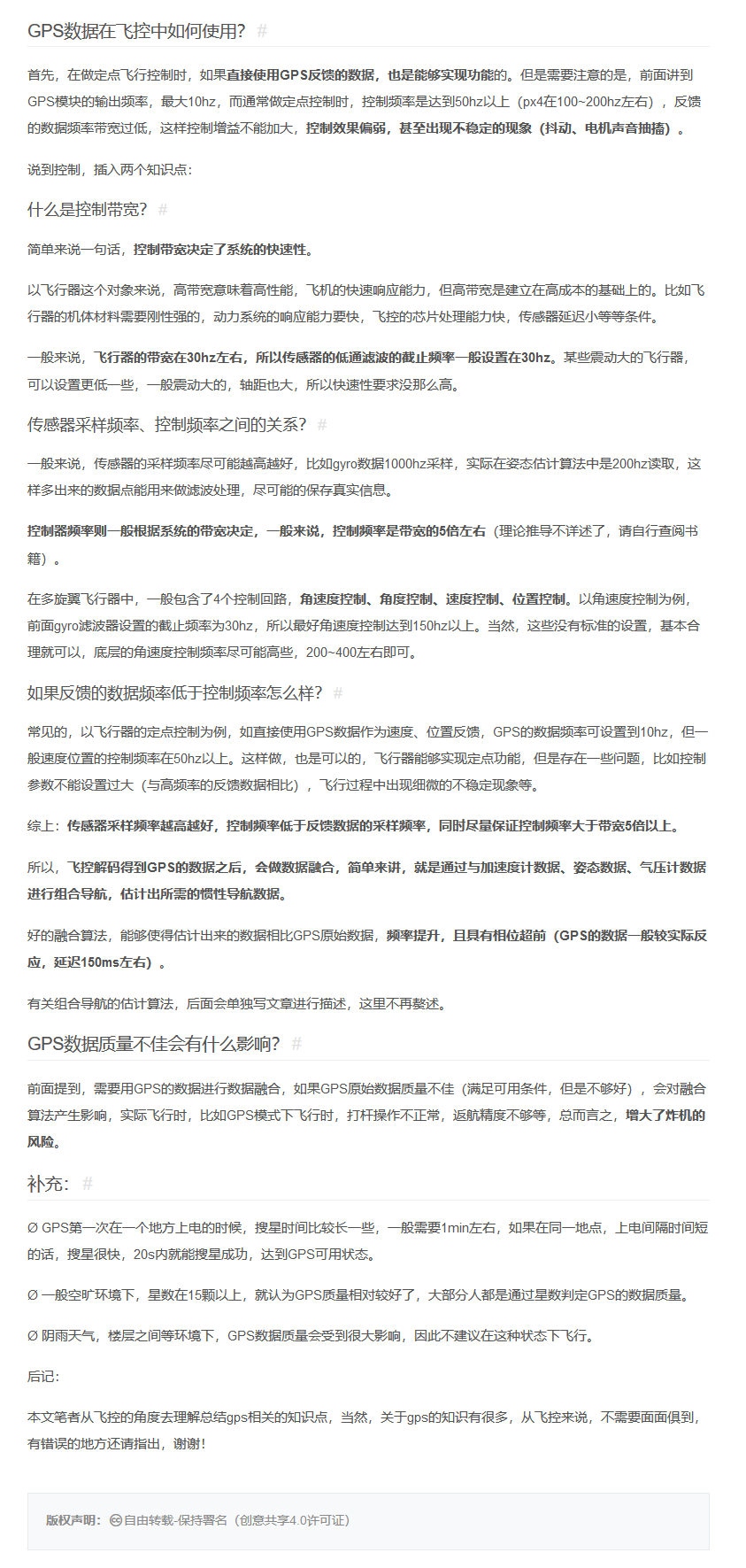
看了下面这篇文章我就明白为什么无名博客里好几篇文章都在讲传感器的滞后,并怎么修正。 如果你是个设计飞控的人,是比如要考虑这个问题的,因为GPS的频率确实太低了,低于控制频率。这不是谁聪明想出来的,是必然要面对考虑的问题。 http://shequ.dimianzhan.com/articles/278

无名的飞控默认是用的PID,没用ADRC,可以改变宏定义切换。而且只在角速度环用ADRC。
看了下代码,默认是PID模式,所以实际那飞的效果是PID。 而且从它这宏定义看书,无名只是把ADRC用在角速度环上面,角速度环的控制可以用ADRC或者PID。 我是怎么一步步找到那的呢,先找到main.c 这里说 主要核心:传感器滤波、姿态解算、惯导、控制等代码在TIME.c里面运行 那就找到time.c 可以看到最关键的一段,把整个控制算法都