攀爬专题

洛谷_P5143 攀爬者_python写法
P5143 攀爬者 - 洛谷 | 计算机科学教育新生态 (luogu.com.cn) 知识点: Python lambda(匿名函数) | 菜鸟教程 (runoob.com) import mathn = int(input())data = []for i in range(n):l = list(map(int,input().split()))data.append(l)
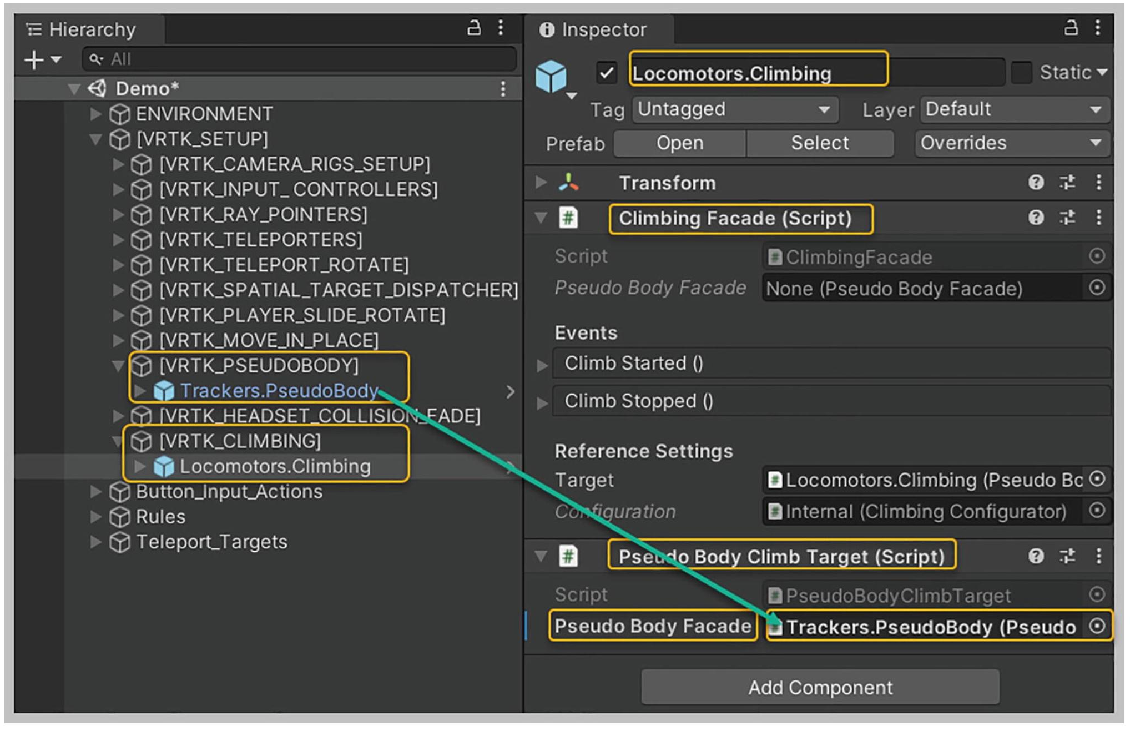
【VRTK】【VR开发】【Unity】13-攀爬
课程配套学习资源下载 https://download.csdn.net/download/weixin_41697242/88485426?spm=1001.2014.3001.5503 【概述】 VRTK提供两个预制件实现攀爬 Climbing Controller,用于控制Player的物理义体Climbable Interactable,用于设置可攀爬对象 【设置Climbin

RFID技术进入攀岩馆,帮助攀岩者定位攀爬路线
室内攀岩馆正在成为更多健身爱好者的新选择。一家西雅图初创公司因此萌生了一个想法:能否将可穿戴科技应用到这一流行趋势中? UpRope 是一家专门为室内攀岩运动生产传感器系统与个人 RFID(射频识别技术,通信技术的一种)腕带的创业公司,这种腕带的主要作用是帮助攀岩者跟踪及定位自己的攀爬路线。 而传感器则需要安装在体育馆的攀岩墙中。用户在开始运动前可通过腕表(由体育馆统一提供)扫描传感器,当到达

中国液态金属量子计算机,中国液态金属逆天!逆重力攀爬
据中科院官网消息,近日,中科院理化技术研究所低温生物与医学研究组首次报道了液态金属可在石墨表面以任意形状稳定呈现的自由塑型效应,并实现了逆重力方式的攀爬运动。研究以封面文章形式发表于《先进材料》。 此前,金属液滴因自身表面张力较大,在电解液中通常以球形方式存在,塑形能力及变形模式相对有限。 在这篇题为《石墨表面上的液态金属操控》(Hu et al., Manipulation of Liquid
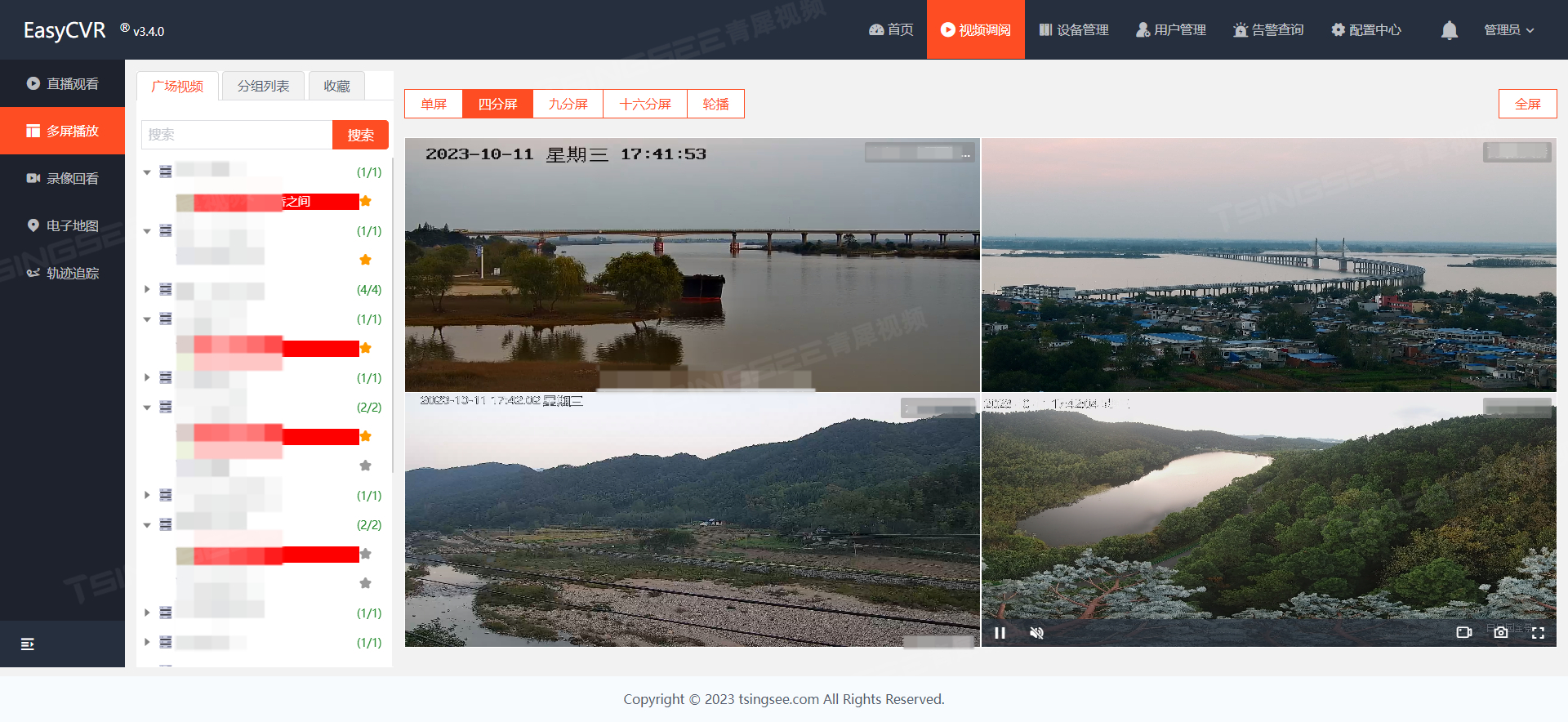
浅述青犀AI算法人体攀爬行为检测的应用场景及解决方案
人体攀爬行为检测是指利用计算机视觉技术对人类攀爬物体的行为进行识别和分析。该技术主要依靠图像和视频数据进行分析,通过识别人类身体的各个部位,以及其在攀爬过程中的动作和姿态,实现对攀爬行为的检测和跟踪。该技术的场景应用比较广泛,今天我们来介绍一下TSINGSEE青犀AI边缘计算硬件智能分析网关内的攀爬检测算法的应用场景。 传统的人体姿态识别方法有RMPE模型和Mask R-CNN模型,

洛谷:P5143 攀爬者(思维 / 距离)
传送门 思路: 按照z排序,最后再按顺序计算(欧几里得)距离并相加即可。 代码实现: #include<bits/stdc++.h>#define endl '\n'#define null NULL#define ll long long#define int long long#define pii pair<int, int>#define lowbit(x) (x &
