定标专题
Landsat8的辐射定标与大气校正
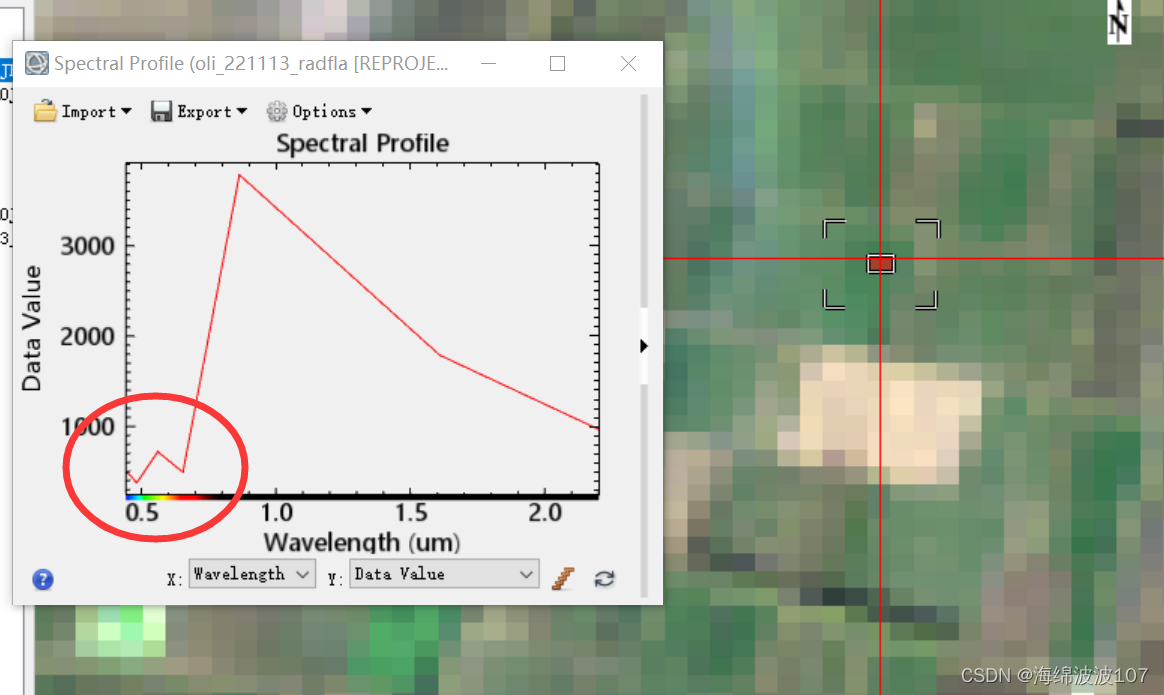
目录 打开影像辐射定标大气校正计算区域高程计算研究区高程大气校正查看处理结果 打开影像 在文件夹中找到xxx_MTL.txt文件,拖到ENVI中 此处可能会出现无法打开的问题,参考该文章(ENVI无法打开Landsat8的头文件问题和解决) 辐射定标 此处我先处理热红外波段 OLI传感器下的波段也用同样的方法定标 大气校正 OLI多光谱需要进行大气校正,

激光雷达反射率定标板如何提取障碍信息
随着信息科技技术的发展,自动驾驶技术在移动机器人等智能移动设备领域得到广泛应用。智能移动设备不仅减少了人力劳动,方便生活,而且提高了工作效率。激光雷达作为自动驾驶技术的核心避障传感器,得到迅速发展。 激光雷达通过对发射和接收的激光信号进行分析计算可以得到目标的距离、方向和速度等信息。激光雷达其工作速度快、分辨率好,在各个领域同样发挥着巨大作用。 激光雷达通过测量激光信号的时间差来确定物体距
envi5.3处理高分二号影像数据辐射定标大气校正
目录 一、多光谱影像处理 1. 辐射定标 2.大气校正 1. 需要准备一些数据: 2.大气校正过程 3、正射校正 二、全色影像处理 1. 辐射定标 2. 正射校正 三、图像融合 1.几何配准 2.图像融合 高分二号处理流程 envi5.3的安装教程: ENVI5.3安装 安装完ENVI5.3后,还需要安装envi app store,然后在app store中安
envi5.3处理高分二号影像数据辐射定标大气校正
目录 一、多光谱影像处理 1. 辐射定标 2.大气校正 1. 需要准备一些数据: 2.大气校正过程 3、正射校正 二、全色影像处理 1. 辐射定标 2. 正射校正 三、图像融合 1.几何配准 2.图像融合 高分二号处理流程 envi5.3的安装教程: ENVI5.3安装 安装完ENVI5.3后,还需要安装envi app store,然后在app store中安
【gdal学习笔记】利用python 的gdal,以及相关库进行遥感图像处理(影像裁剪,辐射定标,大气校正,异常值去除)——以基于landsat8数据提取NDVI为例
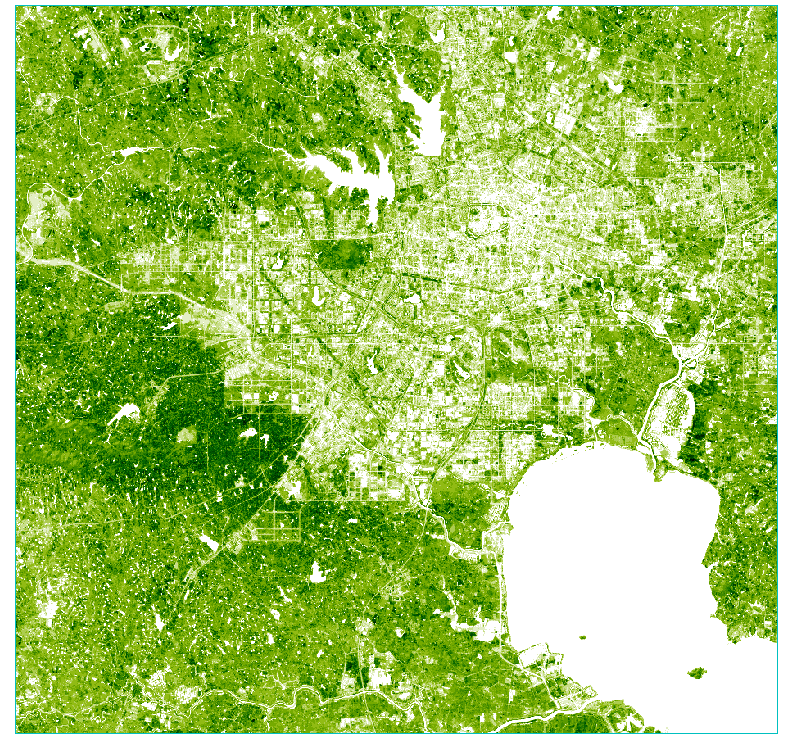
记录最近的学习 参考博客:参考博客 AtmosphericCorrection大气校正_landsat8_见贤思齐547的博客-CSDN博客 目录 遥感图像预处理 数据介绍 遥感数字图像存储格式 图像裁剪: 辐射定标: 大气校正 计算NDVI 其他处理函数: 测试 完整代码以及用例 遥感图像预处理 数据介绍 本次实验利用合肥市
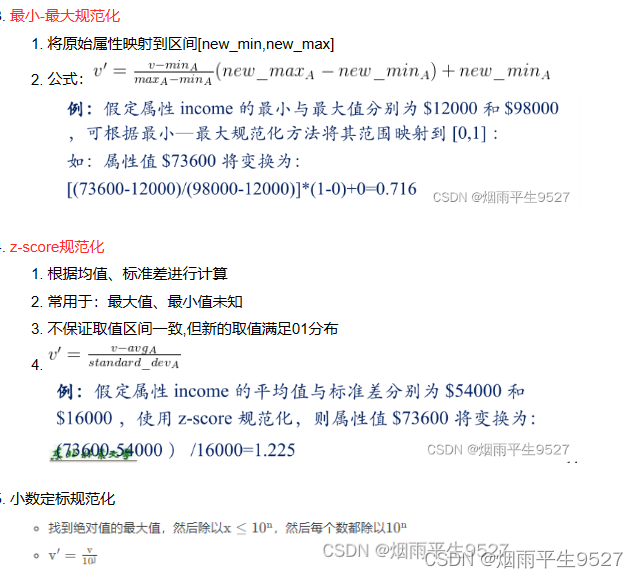
数据挖掘实验(一)数据规范化【最小-最大规范化、零-均值规范化、小数定标规范化】
一、数据规范化的原理 数据规范化处理是数据挖掘的一项基础工作。不同的属性变量往往具有不同的取值范围,数值间的差别可能很大,不进行处理可能会影响到数据分析的结果。为了消除指标之间由于取值范围带来的差异,需要进行标准化处理。将数据按照比例进行缩放,使之落入一个特定的区域,便于进行综合分析。 1.1.最小-最大规范化 clear;clc;A = [78 521 602 2863144 -600