倾斜度专题

计算机视觉——基于傅里叶幅度谱文档倾斜度检测与校正
概述 在计算机视觉领域,处理文档数据时,OCR算法的性能往往会受到文档的倾斜度影响。如果文档在输入到模型之前没有经过恰当的校正,模型就无法期待模型能够提供准确的预测结果,或者模型预测的精度会降低。例如,在信息提取系统中,如果向OCR模型提供了倾斜的图像,模型可能无法准确地识别出文本内容的同时,文本的对齐方式也可能因此而丢失。特别在一些包含了表格检测文档,如果在进行表格检测之前没有对图像的倾斜度进

【STM32+HAL】GY25倾斜度角度模块
一、前言 有关MPU6050模块读取六轴传感器数值的详细内容,详见【STM32+HAL】姿态传感器陀螺仪MPU6050模块 二、所用工具 1、芯片:STM32F103C8T6 2、配置软件:CUBEMX 3、编译器:KEIL5 4、产品型号:GY-25 5、使用芯片:MPU6050 6、商品编码:MK002824 三、实现功能 直接读取并输出俯仰角,横滚角,航偏角数值

e2studio开发三轴加速度计LIS2DW12(4)----测量倾斜度
e2studio开发三轴加速度计LIS2DW12.4--测量倾斜度 概述视频教学样品申请源码下载计算倾斜角度工作原理单轴倾斜检测双轴倾斜检测三轴倾斜检测通信模式管脚定义IIC通信模式速率新建工程工程模板保存工程路径芯片配置工程模板选择时钟设置UART配置UART属性配置设置e2studio堆栈e2studio的重定向printf设置R_SCI_UART_Open()函数原型回调函数user
RationalDMIS 2020 平行度、垂直度、倾斜度的评价
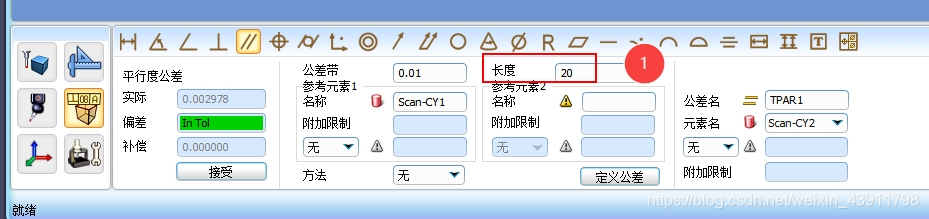
平行度、垂直度、倾斜度都属于定向公差。 RationalDMIS 2020 在对它们进行评价的时候原理上是一样的。 所需要注意的是长度(投影距离)的选择:如果选择长度是-1,那么软件参与计算的是测量的长度;如果有延伸公差的要求,那么就可以自己输入一个数值。 长度: 对于被评价元素是可简化为线的元素,长度数值用来指定评价长度; 公差操作区,位置度、倾斜度、平行度以及垂直度界面,

5432: 数据结构实验:二叉树倾斜度
5432: 数据结构实验:二叉树倾斜度 时间限制(普通/Java):1000MS/3000MS 内存限制:65536KByte总提交:121 测试通过:23 描述

GY-25 倾斜度角度模块 串口直接输出角度数据 MPU-6050 传感器 的使用
2019 电子设计大赛 激光炮题目 写的程序 外形: 链接: GY-25 倾斜度角度模块 串口直接输出角度数据 MPU-6050 传感器 依赖: usart_all.h usart_all.c 见 STM32超级通用串口程序(秘籍) 调用场景: 2019 电子设计大赛 激光炮题目 主程序 最后没用角度传感器,用的自己间舵机角度和 PWM 参数的对应表 代码: angle
android:angle=quot;90quot;,Android手机 G-sensor 倾斜度引出的开发问题
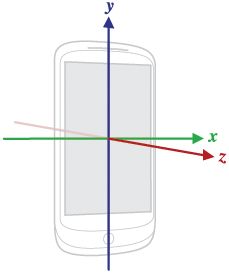
srclinuxandroidframeworksbasepolicysrccomandroidinternalpolicyImplWindowOrientationListener.java private static final int MAX_TILT = 75; //手机的倾斜度阈值,改大则手机倾斜度(相对于水平面)很小屏幕就会旋转,改大手机倾斜度需要很大,屏幕才会旋转。 函数publ

很强势的进度条表现方式RoundCornerProgressBar,(圆角,倾斜度,颜色,开关)
首先是可以实现的效果图: 集成方法: buildgradle中 compile ‘com.akexorcist:RoundCornerProgressBar:2.0.3’ xml中直接使用 <!--进度条--><com.akexorcist.roundcornerprogressbar.RoundCornerProgressBar