伺服系统专题

伺服系统中电机磁极偏角自学习的实现方案
一、 电机磁极偏角自学习原理简述 要知道磁极偏角,首先要明确的是磁极角,在我个人的理解里磁极角就是park和Ipark变换里所需的电角度,我们的矢量控制方法是定磁链的,就是要保证两相同步旋转坐标系的Id轴和三相静止坐标系的A轴要重合;同时由于编码器和电机在安装时是任意位置安装的,因此编码器的零点和矢量控制算法里电角度的零点(Id轴和A轴重合时的位置)一般是对不上的。 下面用一组公式来简要说明:
伺服系统转动惯量离线辨识算法matlab仿真
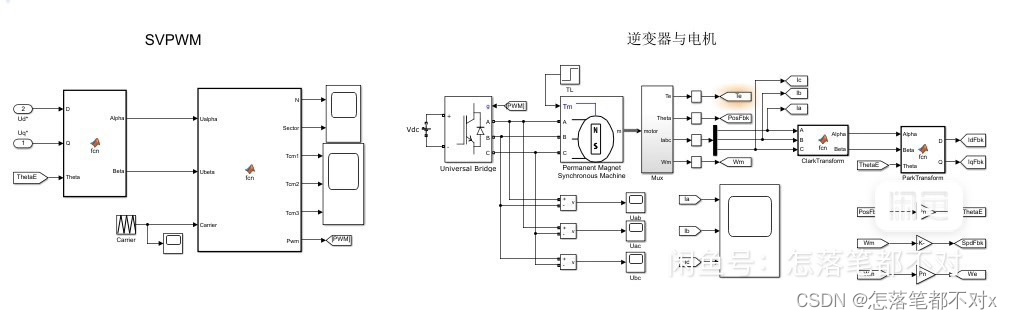
1.模型简介 模型为永磁同步电机伺服控制仿真,采用Matlab R2018a/Simulink搭建。 模型内主要包含DC直流电压源、三相逆变器、永磁同步电机、采样模块、SVPWM、Clark、Park、Ipark、三角波发生器、转动惯量离线辨识、速度环、电流环等模块,其中,SVPWM、Clark、Park、Ipark、三角波发生器、转动惯量离线辨识、模块采用Matlab funtion编写,其与C

【工具使用系列】关于 MATLAB 电液伺服系统,你需要知道的事
2019独角兽企业重金招聘Python工程师标准>>> 如何仿真电液伺服系统 转载于:https://my.oschina.net/shamrocks/blog/1637897

数控机床中伺服系统的现状及展望
2006-04-25 23:57:50 数控机床中伺服系统的现状及展望 一、概述 伺服系统是以机械运动的驱动设备,电动机为控制对象,以控制器为核心,以电力电子功率变换装置为执行机构,在自动控制理论的指导下组成的电气传动自动控制系统。这类系统控制电动机的转矩、转速和转角,将电能转换为机械能,实现运动机械的运动要求。具体在数控机床中,伺服系统接收数控系统发出的位移、速度指令,