万向节专题
万向节锁死(Gimbal Lock)
Gimbal Lock是一个常见的3D动画问题,主要由旋转顺序引起的。我来详细解释一下它的成因: 在三维空间中,任何旋转都可以分解为绕X,Y,Z三个轴的欧拉旋转(Euler Rotation)。每个轴的旋转是按照一定顺序进行的,比如XYZ或ZYX等。 理论上,通过这三个旋转值的组合,可以达到任意的空间姿态。但是,当其中两个旋转轴重合时,就会导致万向节锁死(Gimbal Lock)的发生。 具

Unity游戏内相机(主角头部视角)的旋转问题:“万向节锁定”(Gimbal Lock)
前言: 在Unity中,相机的正前方是Z正半轴,相机的正右方是X正半轴,相机的正上方是Y正半轴。这个很好理解。 现在,我想要相机看向左前上方45°,你会觉得要怎么做呢? 如果是我的话,我的第一感觉确实就是先绕相机的Y轴逆时针旋转45度,然后再绕相机的X轴逆时针旋转45度。然后确实是做到了,没错的,大家的第一印象没毛病。 假设这

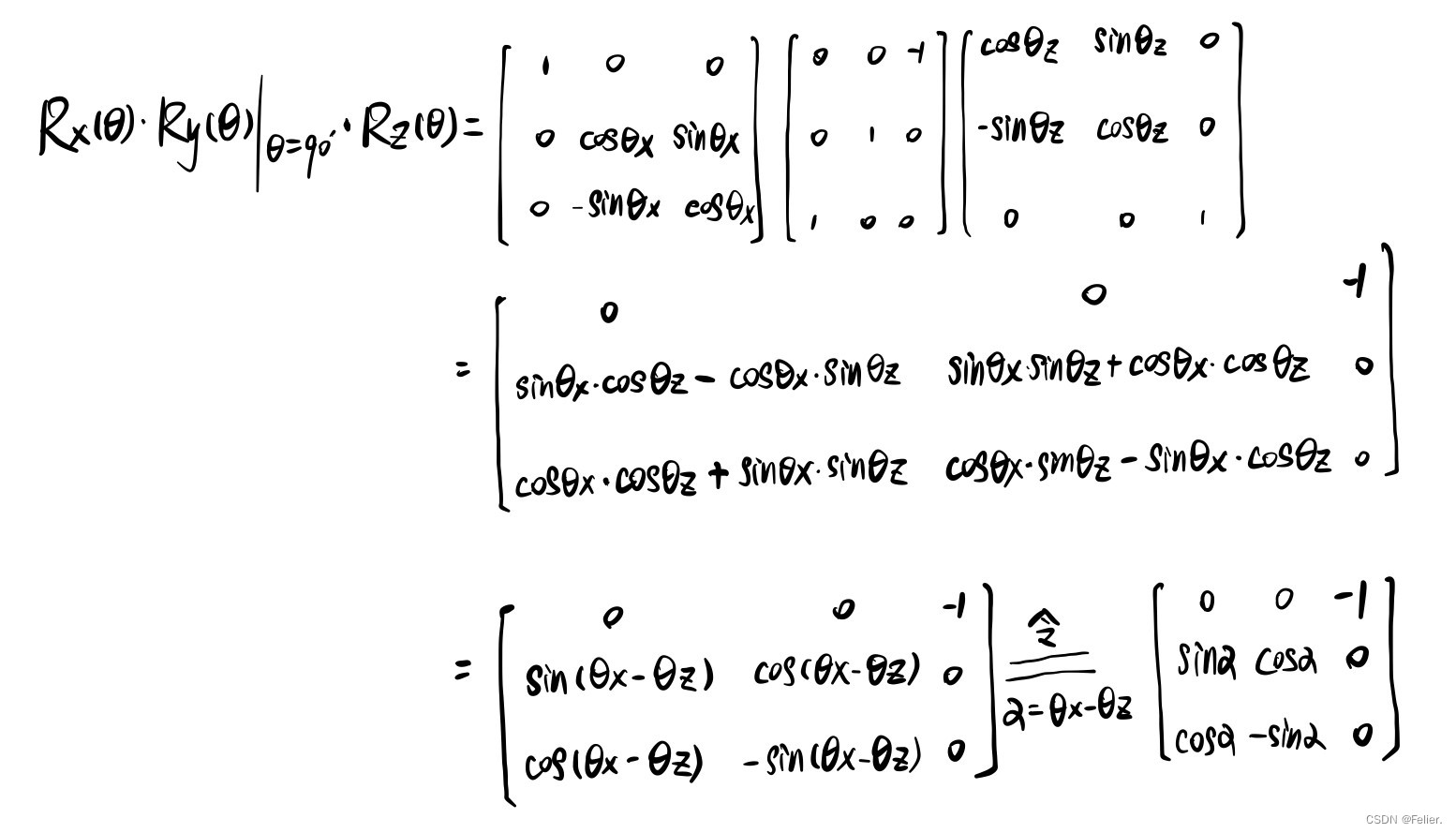
万向节死锁之数学矩阵解释
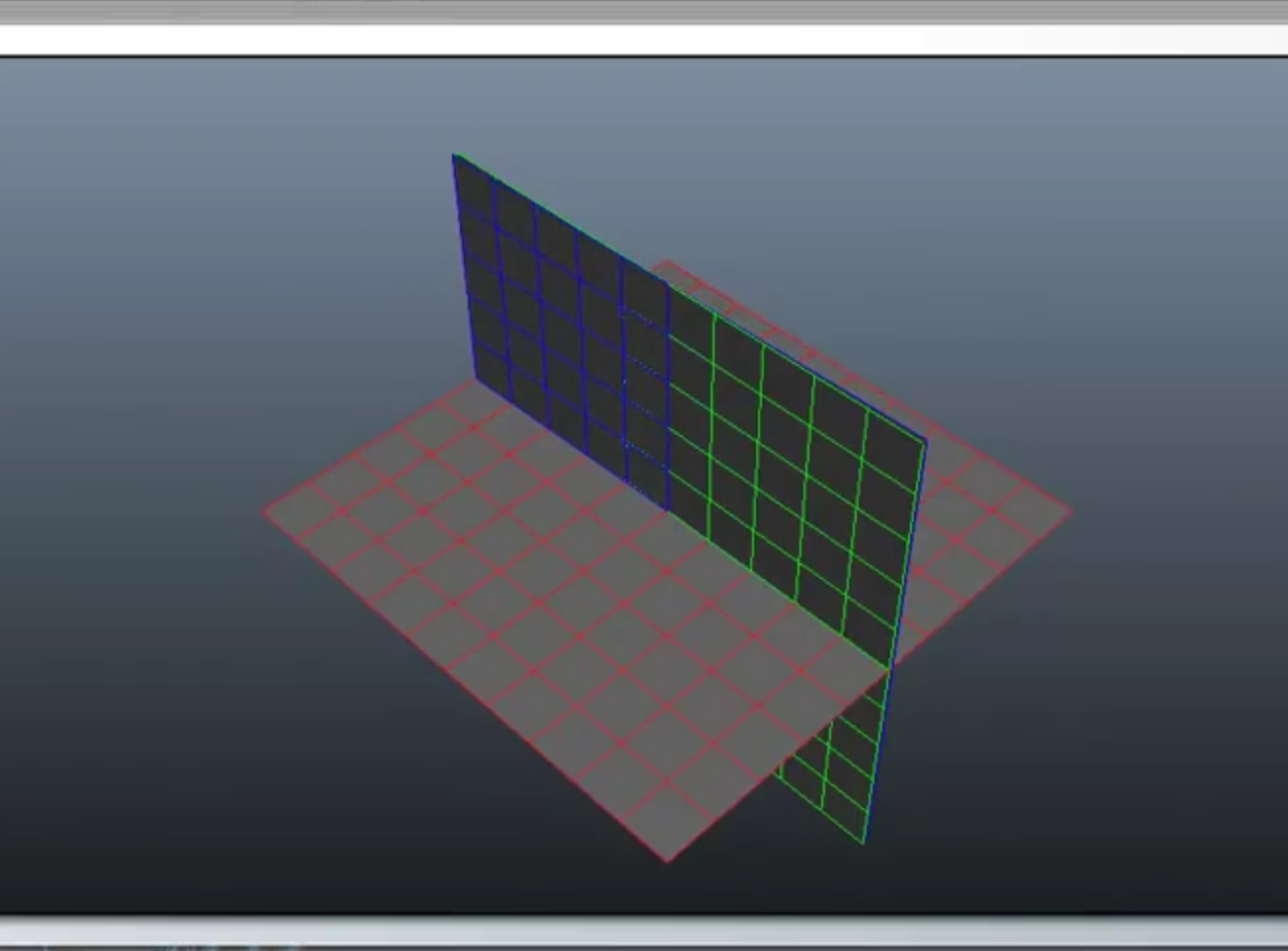
套用这位博主的现象解释https://blog.csdn.net/andrewfan/article/details/60981437。图文并茂很有说服力,我只在数学层面上再加深一下解释,可能是有问题的,大神轻喷,欢迎大家指正。 在解释之前,我先把上面博主的现象阐述的更加明白一点。就是这张图,上面的三个环其实是代表的三个轴,它与底下的三条带颜色的坐标轴对应(在这里指出一下,蓝色的坐标轴对应的绿色
试一文讲清“万向节死锁”
目录 引入欧拉角 万向节死锁 从图形上理解万向节死锁 从数学上理解万向节死锁 引入欧拉角 这里先讲欧拉角。什么是欧拉角? 百度百科:用来确定定点转动刚体位置的3个一组独立角参量,由章动角θ、旋进角(即进动角)ψ和自转角φ组成,为欧拉首先提出而得名。 说的简单些:欧拉角的目的就是描述物体或者物体自身坐标系相对于当前世界的绝对坐标系的一种位