yaw专题

判断两个yaw角度之差是否超过了90度
一. 判断两个yaw角度之差是否超过了90度 要判断两个 yaw 角度之差是否超过 90 度,你可以通过计算这两个角度的差值,并将其归一化为 [-180, 180] 的范围内。接着,只需判断该差值的绝对值是否大于 90 度。 实现步骤: 计算角度差:两个角度的差值可以通过直接相减得到,但需要将结果限制在 [-180, 180] 范围内,因为角度是周期性的。归一化到 [-180, 180] 范

车辆姿态角(Euler角)Pitch、Yaw、Roll 的设定
首先申明:此坐标系是针对车辆而设定的,对于无人机来说是不同的。 pitch():俯仰角,pitchAngleC2W (orientation radian Y) yaw():航向角,yawAngleC2W (orientation radian Z) roll():横滚角,rollAngleC2W (orientation radian X)
【自动驾驶】17. pitch yaw roll是什么
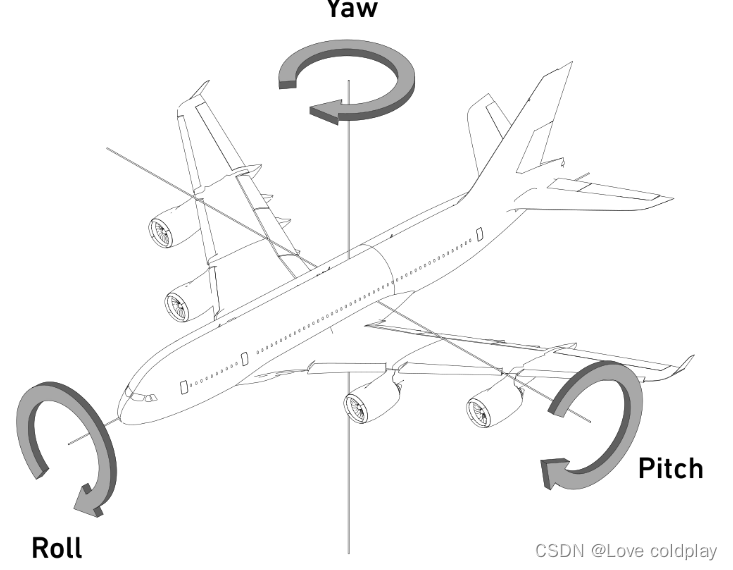
本文链接:https://blog.csdn.net/yuzhongchun/article/details/22749521 三维空间的右手笛卡尔坐标如图1所示: 图1 在航空中,pitch, yaw, roll如图2所示: 图2 pitch是围绕X轴旋转,也叫做俯仰角,如图3所示: 图3:俯仰角pitch yaw是围绕Y轴旋转,也叫偏航角,如图

YAW-2000D微机控制电液伺服压力试验机
一、简介 微机控制电液伺服压力试验机主要用于砖、石、水泥、混凝土等材料的抗压强度试验,广泛应用于建筑行业和检测单位,也可用于其他材料的抗压性能试验。测控系统采用高精度数字伺服阀,具有力闭环控制功能,能够实现等载荷速率加载或等应力速率加载,控制精度高,可靠性好,采用微机实现电子测量、自动完成抗压强度试验,自动计算和打印报告。 主要性能技术指标 名称 参数 备注 精度 0.5级

YAW-300YD微机控制恒应力烟道压力试验机
一、设备简述: YAW-300YD微机控制恒应力烟道压力试验机是我公司针对排烟道产品专业生产制造,主要用于玻璃纤维增强水泥排气管道式成品力学性能试验,符合《JC/T854-2008》的标准要求,可进行排气管道垂直承载力、抗压强度测试。该试验机采用微机控制加载,可实现恒载荷、恒速率试验要求;可连续加荷平稳、具有实验数据自动显示、自动采集并储存数据、绘制曲线,自动打印试验报告,计算机适时控
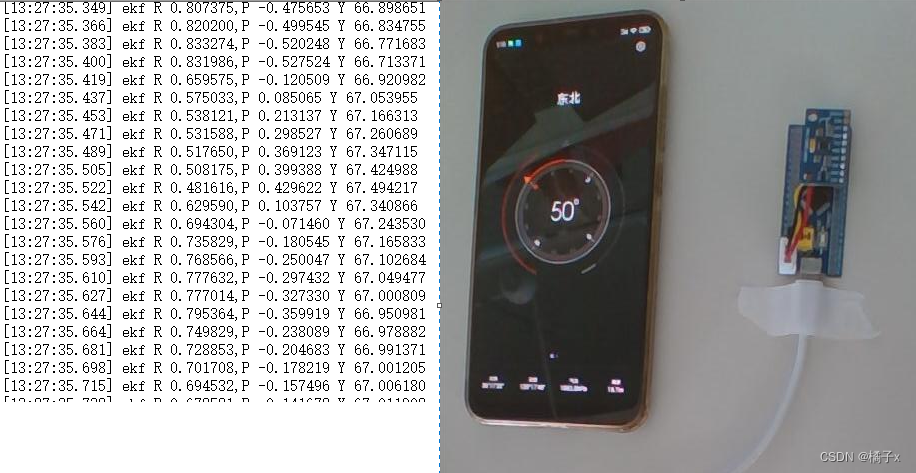
MPU9250调试。做姿态、指南针(融合磁力计计算Yaw)
底部 附工程源码链接 --2022-10-5 =================== 近期调了一个姿态传感器,使用了MPU9250,主要是算法库不太好找,自己写是不太可能的,欧拉角、四元素计算反正我是没看懂,也贪图快,想一步到位调出来。 硬件工程师使用了IIC接口。 1. 最早调试使用了官方提供的mpl例程,移植完后俯仰和翻滚都没有问题,主要是YAW 方向角,每次芯片重启Yaw都是0,转
「 机器人学 」“姿态角 roll、yaw、pitch”讲解
一、前言 载体坐标系与载体坐标系的关系是三个Euler角:yaw,pitch,roll,反应了载体相对基准面的姿态。 二、姿态角讲解 1. pitch是围绕X轴旋转,也叫做俯仰角。当X轴的正半轴位于过坐标原点的水平面之上(抬头)时,俯仰角为正,否则为负,如下图所示: 2. yaw是围绕Y轴旋转,也叫偏航角。即机头右偏航为正,反之为负。