vslam专题
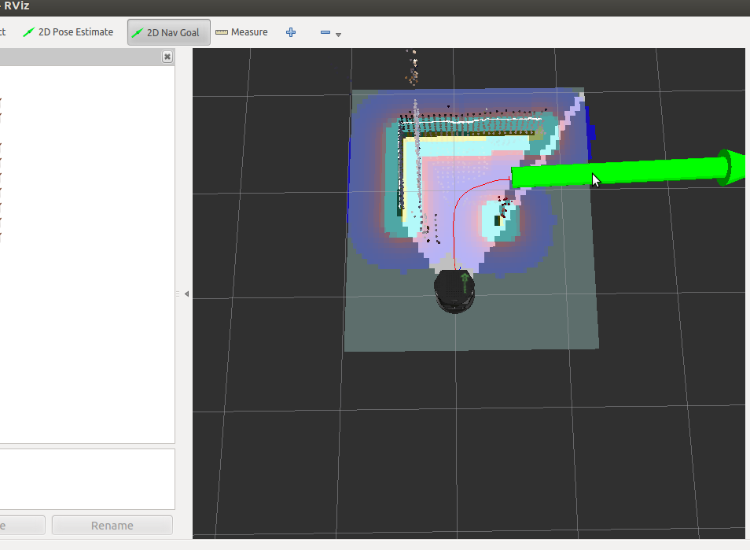
ROS与VSLAM入门教程-rtabmap_ros-利用turtlebot实现建图和导航
ROS与VSLAM入门教程-rtabmap_ros-利用turtlebot实现建图和导航 ROS与VSLAM入门教程-rtabmap_ros-利用turtlebot实现建图和导航 说明 介绍如何使用turtlebot通过rtabmap_ros进行建图和导航 安装相关包: Kinetic $ sudo apt-get install ros-kinetic-turtlebot-bringup r

AR HUD_VSLAM+显示技术
智能座舱的一个重要技术方向是表达与展示。HUD可以将驾驶相关的信息,如车速、导航等投射到驾驶员的视线上方,避免驾驶员的目光离开前方道路。这种显示方式可以提供关键信息的实时展示,减少驾驶员的分心。 HUD的技术原理就是通过光学系统将信息源提供的数据转化为投影图像,再通过反射和折射将图像显示在驾驶员的视线上方,以提供驾驶信息和导航等功能。HUD的技术原理主要包括以下几

ubuntu18.04部署DXSLAM,CNN+VSLAM,CPU实时运行
一、下载源代码 打开终端,输入命令克隆仓库 git clone https://github.com/raulmur/DXSLAM.git DXSLAM 二、配置环境 We have tested the library in Ubuntu 16.04 and Ubuntu 18.04, but it should be easy to compile in other platfor
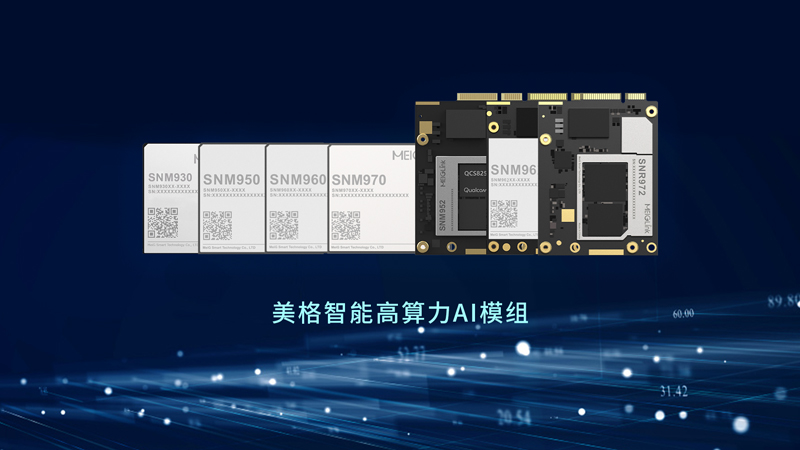
MWC 2024丨生成式AIGC成为最大亮点—美格智能携手阿加犀推出多感知融合VSLAM解决方案
2024世界移动通信大会盛况空前,AI成为最大亮点。2月28日,美格智能携手阿加犀,将算力模组的硬件优势与AI优化部署技术相结合,在MWC展会现场展示了基于高算力AI模组的多感知融合VSLAM解决方案。这一创新性方案可应用于智能机器人与低速无人驾驶场景,助力扩展智能机器人生态系统。 ▌VSLAM是什么 VSLAM是一种结合了人工智能和3D视觉技术的导航技术,VSLAM通过安装在自主移动

VSLAM之单目相机选型
做视觉SLAM难免要面临如何选择相机,因此有必要了解下与相机相关的参数,泡泡机器人曾经整理过论文中常用的相机(推荐产品列表),亦可以参考之. 2018年10月20更新: 1)测试了一款全局快门相机:UI-1221LE-C-HQ 2)做了这款相机与XSENS IMU/轮式里程计的硬件时间戳同步,时间戳同步代码已上传至github: ueye相机驱动地址:https://github.com
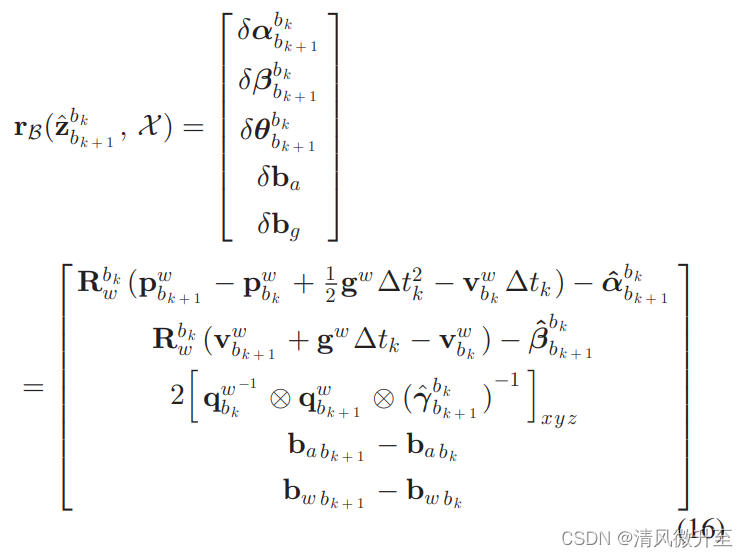
vSLAM中IMU预积分的作用--以惯性导航的角度分析
作为一个学过一点惯导的工程师,在初次接触视觉slam方向时,最感兴趣的就是IMU预积分了。但为什么要用这个预积分,在看了很多材料和书后,还是感觉模模糊糊,云里雾里。 在接触了vSLAM的更多内容后,站在历史研究者的角度去分析,得到了一个更为清晰的作用分析。 首先,需要明确IMU与相机这两种传感器的互补作用,这是为什么要用IMU的原因。直接贴出程博书中的内容,总结的比较全面了。 总之,就是相机成
vSLAM中IMU预积分的作用--以惯性导航的角度分析
作为一个学过一点惯导的工程师,在初次接触视觉slam方向时,最感兴趣的就是IMU预积分了。但为什么要用这个预积分,在看了很多材料和书后,还是感觉模模糊糊,云里雾里。 在接触了vSLAM的更多内容后,站在历史研究者的角度去分析,得到了一个更为清晰的作用分析。 首先,需要明确IMU与相机这两种传感器的互补作用,这是为什么要用IMU的原因。直接贴出程博书中的内容,总结的比较全面了。 总之,就是相机成
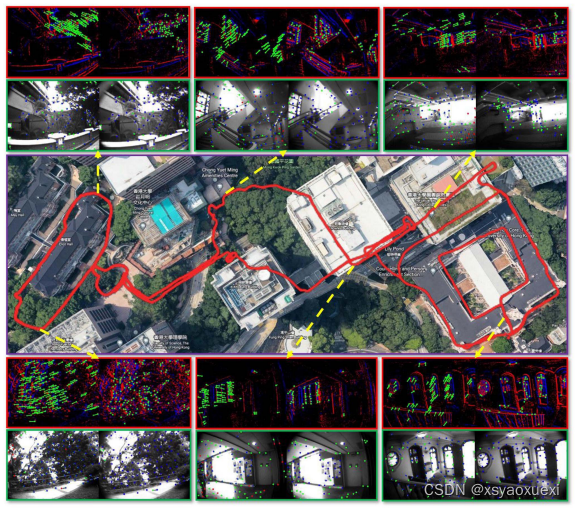
vslam论文24:ESVIO: 基于事件相机的双目VIO(RAL 2023)
摘要 异步输出低延迟事件流的事件相机为具有挑战性的情况下的状态估计提供了很大的机会。尽管近年来基于事件的视觉里程测量技术得到了广泛的研究,但大多数都是基于单目的,而对立体事件视觉的研究很少。在本文中,我们介绍了ESVIO,这是第一个基于事件的立体视觉惯性里程计,它利用了事件流、标准图像和惯性测量的互补优势。我们建议的pipeline包括ESIO(纯基于事件的)和ESVIO(带有图像
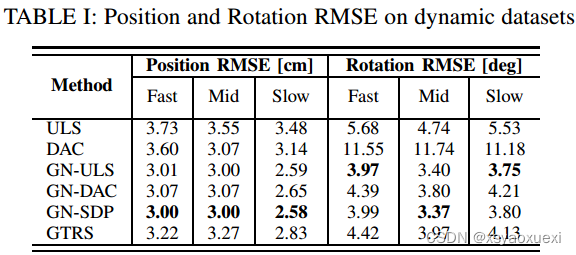
vslam论文17:基于UWB测量的高效平面位姿估计(ICRA 2023)
摘要 状态估计是自主系统的重要组成部分。集成超宽带(UWB)技术已被证明可以纠正长期估计漂移并绕过环路闭合检测的复杂性。然而,很少有机器人工作将超宽带作为一个独立的状态估计解决方案。 这项工作的主要目的是研究仅使用超宽带距离测量的平面姿态估计。我们证明了一个两步格式的优良性质,即我们可以通过一步的高斯-牛顿迭代使一个一致估计量渐近有效。基于这一结果,我们设计了GN-
发展到海外市场版图,高仙清洁机器人VSLAM首秀ISSA外国展
5月15日-18日,高仙全系列商用清洁机器人ECOBOT SCRUB登陆2018荷兰阿姆斯特丹国际清洁展(ISSA Interclean Amsterdam)。 国际清洁展由ISSA(国际清洁行业协会)创办于1967年,是全球历史最悠久的专业清洁展会。本届清洁展规模达8万平米,容纳了来自40多个国家和地区的专业清洁产品与服务商。 高仙商用清洁机器人ECOBOT SCRUB系列是目前市场上应用
ORB-SLAM2:一种开源的VSLAM方案
点击上方“3D视觉工坊”,选择“星标” 干货第一时间送达 摘要 ORB-SLAM2是基于单目,双目和RGB-D相机的一套完整的SLAM方案。它能够实现地图重用,回环检测和重新定位的功能。无论是在室内的小型手持设备,还是到工厂环境的无人机和城市里驾驶的汽车,ORB-SLAM2都能够在标准的CPU上进行实时工作。ORB-SLAM2在后端上采用的是基于单目和双目的光束法平差优化

ORB-SLAM2:一种开源的VSLAM方案(译文)
摘要: ORB-SLAM2是基于单目,双目和RGB-D相机的一套完整的SLAM方案。它能够实现地图重用,回环检测和重新定位的功能。无论是在室内的小型手持设备,还是到工厂环境的无人机和城市里驾驶的汽车,ORB-SLAM2都能够在标准的CPU上进行实时工作。ORB-SLAM2在后端上采用的是基于单目和双目的光束法平差优化(BA)的方式,这个方法允许米制比例尺的轨迹精确度评估。此外,ORB-SL

开源库收集(机器人领域VSLAM)1
机器人领域中相关开源库资料汇总收集 目录 矩阵运算 1.1 稀疏矩阵计算算法 1.1.1 SuiteSparse图形库 2.1 可视化及人机交互 2.1.1 Pangolin 正文 1. 矩阵运算 1.1 稀疏矩阵计算算法 1.1.1 SuiteSparse SuiteSparse是一系列稀疏矩阵运算算法集,主要包含: •GraphBLAS: graph algorithms in