ur10专题

ARCAM创新性摄像机控制系统集成UR10协作机器人
电子产品与技术行业正在蓬勃发展,需要灵活地将机械手臂整合至各类电子设备和技术生产中,包括照明、移动电话、计算机、输入设备、音频和视频等等。科技行业的设计、应用、安装、制造、运营和维护等各个阶段,都需要具备快速适应不断变化的环境的能力。优傲机器人的协作机器人轻巧、节省空间、易于重新部署在多个应用程序中,而不会改变现有的生产布局,为业务增加价值。 案例概括 法国初创企业augmented ro
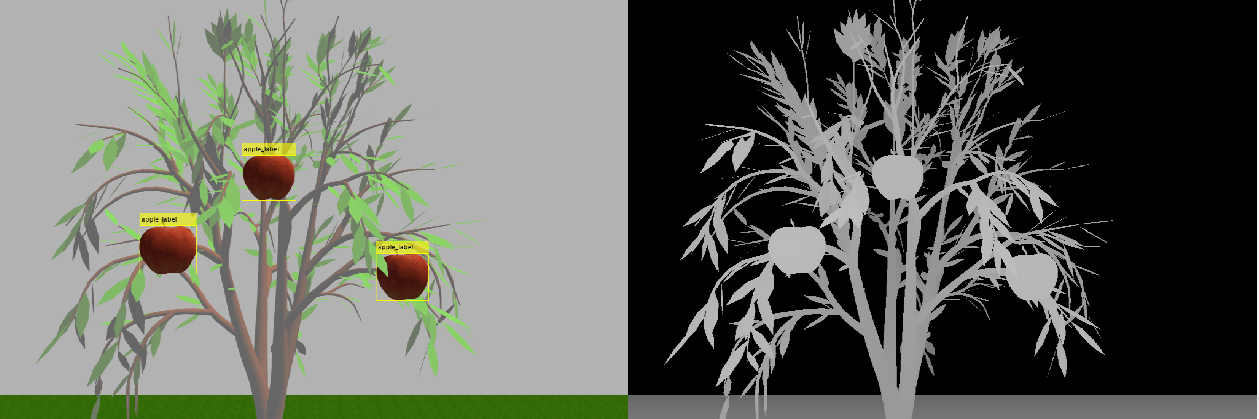
MATLAB - Gazebo 联合仿真 —— 使用 UR10 机械臂检测和采摘水果
系列文章目录 文章目录 系列文章目录前言一、设置 Gazebo 仿真环境二、在 Gazebo 中模拟和控制机器人2.1 概述2.2 任务调度器2.3 感知和目标生成系统2.4 运动规划2.5 机械臂和关节控制系统 三、分配用于控制机器人的参数3.1 定义机器人模型和运动规划参数,3.2 定义机械手姿势和摄像机参数3.3 配置 Gazebo 协同仿真设置3.4 定义夹具控制设置 4. S
第一次编程操作UR10协作机器人的记录
第一次编程操作UR10协作机器人的记录 1 引言 UR机器人参考:丹麦优傲机器人 中文网页 项目需要借来了一台UR10协作机器臂,用自带的触摸屏控制试验了一下,又从网上下载了一段基于C#的程序,大概读了一下,并用VS2015用C实现了对机械臂的控制,以下纪录。 注:这里只是工作记录,没深究内部原理和协议规定。 2 连接和端口 计算机与UR机器人的连接通过网络,通信采用了TCP/IP协议,
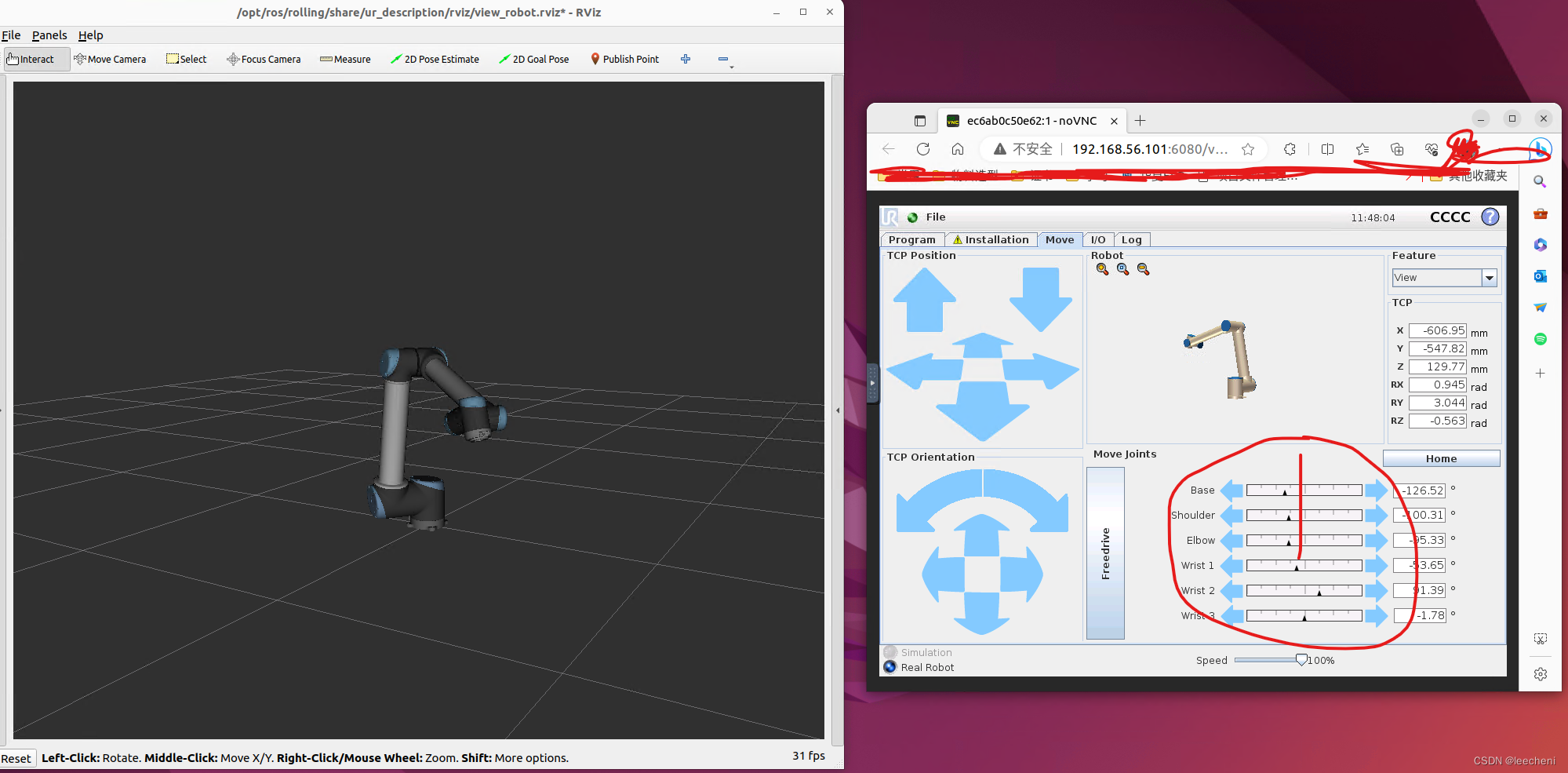
ros2 UR10仿真包运行
前言 一个月前安装了一下这个包,但是有报错。现在换了一个强劲的电脑,内存64G ,显存39G ,终于跑起来了,没有报错。网页控制器可以控制RVIZ中的机器人旋转。 vituralBOX中3D加速要勾选,这样才能发挥独立显卡的作业,才能让虚拟机不卡顿。 我是通过远程桌面去访问这个强劲电脑,因网速问题略微卡顿,不太影响。 1.加载虚拟控制器 这个加载的时候,非root用户会提示权限不