staticlayer专题
ROS naviagtion analysis: costmap_2d--StaticLayer
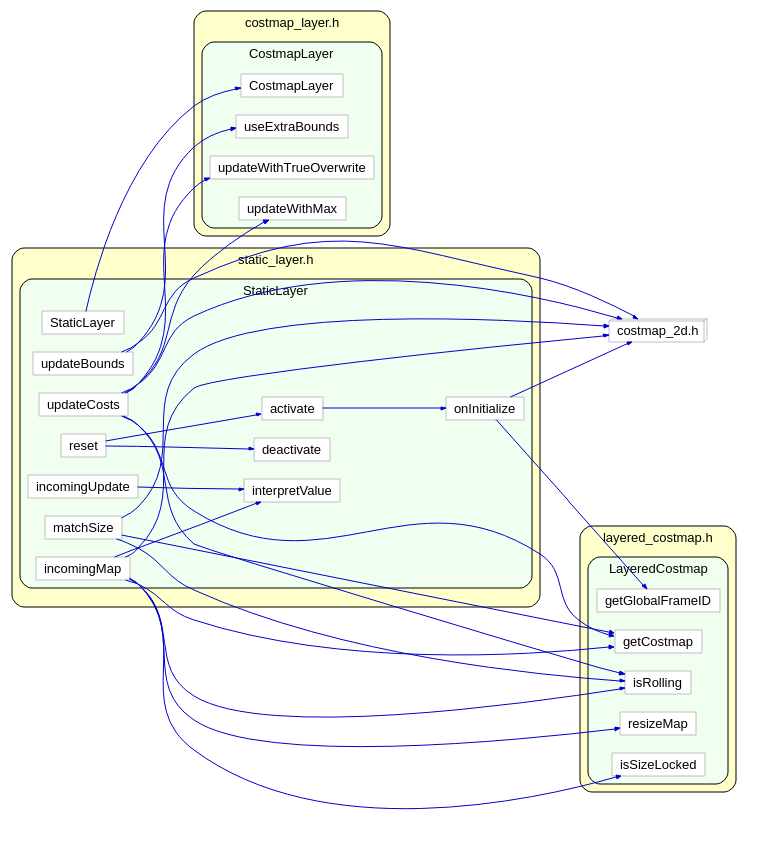
从UML中能够看到,StaticLayer主要是在实现Layer层要求实现的接口。 virtual void onInitialize();virtual void activate();virtual void deactivate();virtual void reset();virtual void updateBounds(double robot_x, double rob