sfm专题
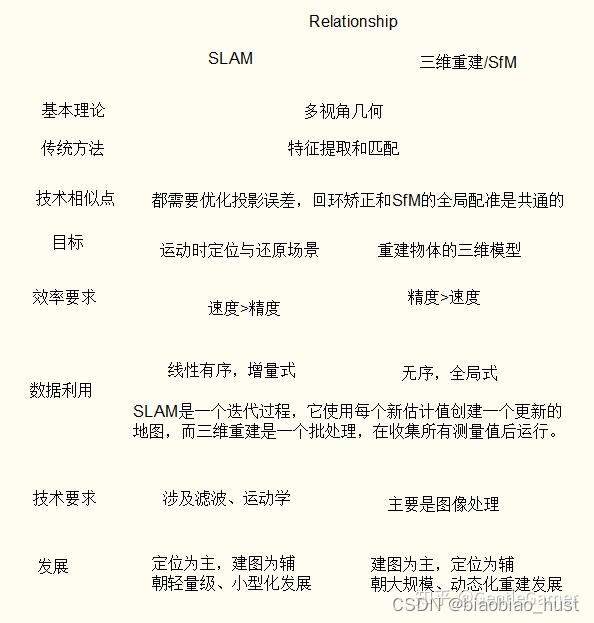
三维重建(SFM)与实时定位建图(SLAM)的区分与联系
1、SLAM SLAM是Simultaneous Location and Mapping,同时定位与地图构建。是指搭载特定传感器的主体,在没有环境先验信息的情况下,于运动过程中建立环境的模型,同时估计自己的运动。目的是解决自主机器人“定位”和“建图”两个问题。同时要求能够实时地,没有先验知识地进行。SLAM问题的本质是对主体自身(位姿)和周围环境空间(点云)的不确定性的估计。

多视图三维重建-SFM简介
背景 掌握传统的多视图三维重建基本流程 总体流程 多视图三维重建的Pipieline如下图,总共分为四个步骤: 拍摄场景多视角的图像建立这些图像之间的联系(Data Association)SFM稀疏重建MVS稠密重建 Data Association 建立图像之间的联系主要包含以下4个步骤:1)特征提取;2)特征匹配;3)基于几何的特征对验证;4)特征建树 1)图像的特征提取。 1
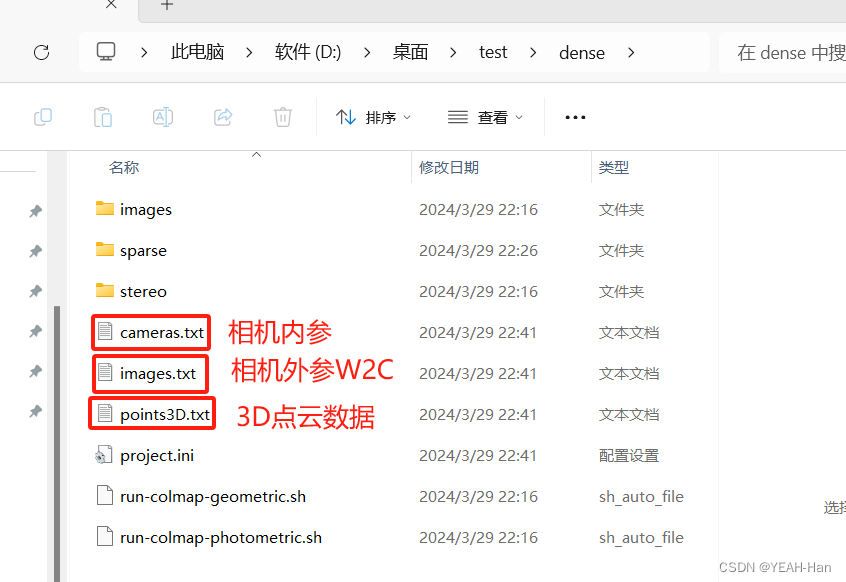
COLMAP(Windows)实现SFM三维重建位姿估计
问题产生: Guassian splatting第一步用colmap进行位姿估计,图片匹配失败,输出图片全靠运气,最少的时候甚至一张都没匹配上,所以想到用colmap软件先进行匹配,再放入高斯训练。 colmap使用步骤: 1.打开colmap.bat 2.新建项目 【File】–> 【New Project】 3. 新建database文件,选择images所在路径 【N
谭平老师-SLAM课程要点记录-SfM
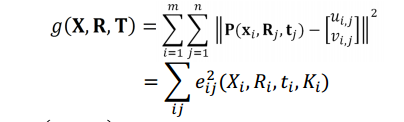
内容链接地址 bilibili视频链接 ppt链接,提取码: gk29 Structure‐from‐Motion Structure = 3D点云 Motion = 相机位置和姿态 SFM = 运动中的相机恢复出整个场景 SfM的输入与输出 输入:带有关联特征的图像(特征检测和匹配已经做得很好了), p i , j = ( u i , j , v i , j ) p_{i,j}=(u_

【三维重建】运动恢复结构(SfM)
运动恢复结构是通过三维场景的多张图像,恢复出该场景的三维结构信息以及每张图片对应的摄像机参数。 欧式结构恢复(内参已知,外参未知) 欧式结构恢复问题: 已知:1、n个三维点在m张图像中的对应点的像素坐标 2、相机内参 求解:1、n个三维点坐标 2、m个摄像机的外参数R、T 通过极几何我们知道本质矩阵和基础矩阵【三维重建】对极几何-CSDN博
三维重建(7)--运动恢复结构SfM系统解析
目录 一、SfM系统(两视图) 1、特征提取 2、特征匹配 3、RANSAC求解基础矩阵F 4、完整的欧式结构恢复算法流程 二、基于增量法的SfM系统(以OpenMVG为例) 1、预处理 2、图像特征点提取与匹配 3、两视图重构点云 4、增加新视图,多视图重构 一、SfM系统(两视图) 对于欧式结构恢复的两视图问题,需要获得三维场景的m张图像的像

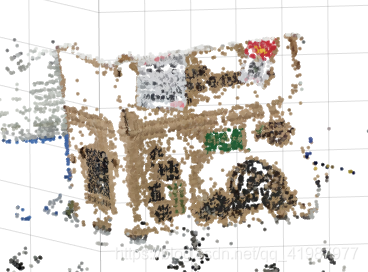
增量式sfm复现实践——成果展示、易错问题总结及体会
理论学习+编程实战,三个月的时间,算是把增量式sfm(在摄影测量领域也叫空三)给复现了出来。先上成果图,然后简要说一些复现sfm过程中需要注意的点,最后谈谈自己的心得体会。(关于增量式sfm的详细介绍,参见这里) 1 成果展示 1.1 数据1 Fig.1 用于重建的20张无人机拍摄的图像 Fig.2 增量式sfm重建出来的稀疏点云 Fig.3 按高程赋
基于matlab的sfm三维重建
基于matlab的sfm三维重建 想学习三维重建,但是不会c++语言,python调用opencv弄得我头大,正好matlab上也有三维重建的代码,于是编跟着案例库的案例倒弄了一阵,大致弄明白了,分享一个流程给新手做参考。 ps:几个周以后再看自己做的这个,都是啥玩意,我都不好意思看了,事实上这个算不上稠密重建,纹理映射没有,由于手机是双摄标定出来也不准确,导致三角测量时相机位置偏的太多,在之后