rrtstar专题
无人驾驶(移动机器人)路径规划之RRT与RRTStar算法及其matlab实现
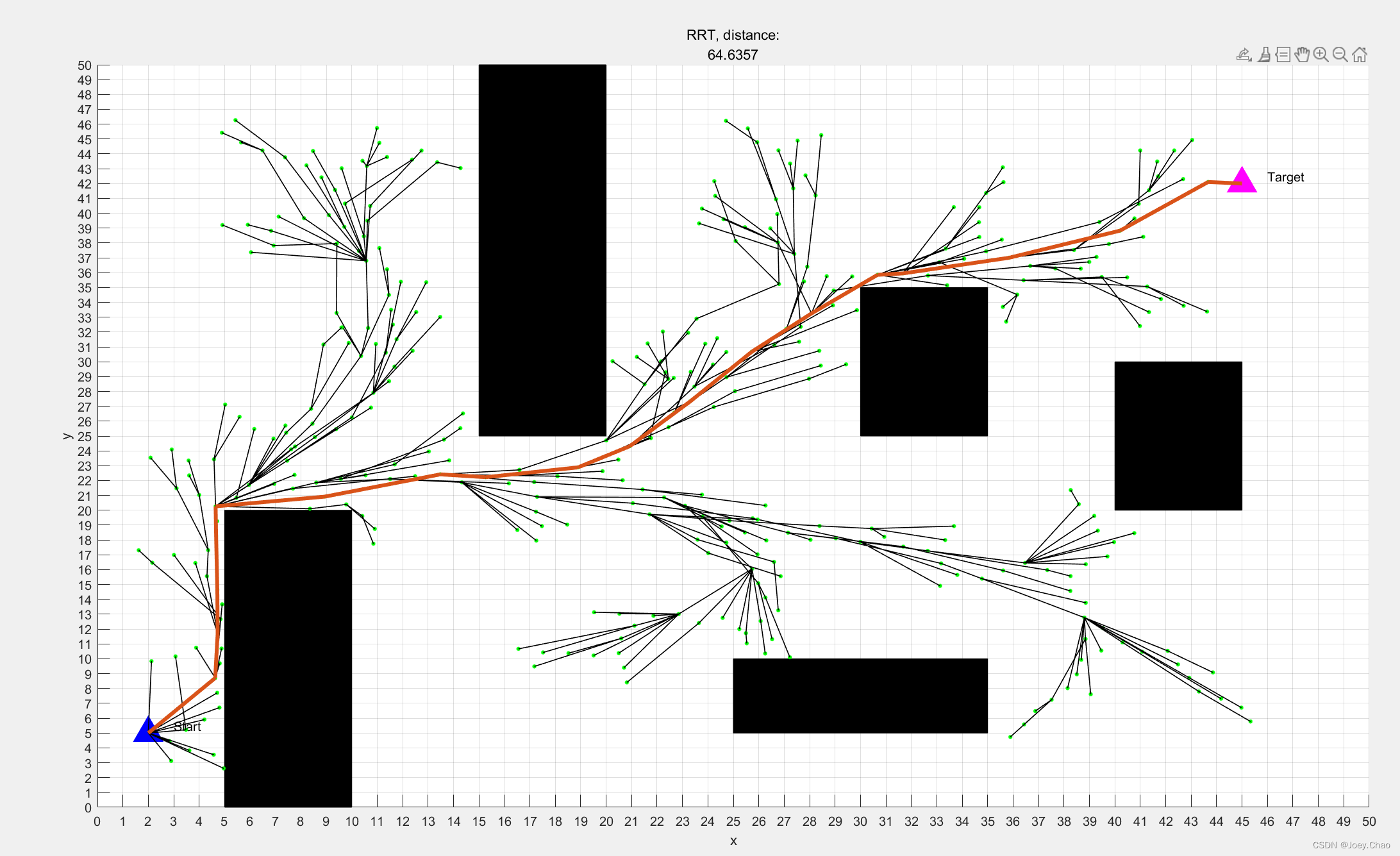
在自动驾驶与移动机器人路径规划时,必定会用到经典的算法RRT与RRT Star。下面是RRT与RRTStar的matlab实现效果。可以发现RRTStar效果明显改善。 目录 一、效果比较 1.1 RRT算法效果(黑色为障碍物,红色线为最终路径,蓝色三角形为开始点,粉色三角形为目标点) 1.2 RRTStar算法效果(黑色为障碍物,红色线为最终路径,蓝色三角形为开始点,粉色三