rosrun专题

重启终端rosrun,找不到package
重启终端rosrun,找不到package 需要每次打开一个终端都重新source devel/setup.bash 或者描述为:source devel/setup.bash(只在当前终端生效)的问题 gedit ~/.bashrc 文件打开后直接翻到最后面 在最后加入 source/home/############/catkin_ws/devel/setup.bash

【rosrun diagnostic_analysis】报错No module named rospkg | ubuntu 20.04
ubuntu20.04使用指令报错 现象 rosrun diagnostic_analysis export_csv.py my.bag -d ~/Desktop报错 Traceback (most recent call last): File "/opt/ros/noetic/lib/diagnostic_analysis/export_csv.py", line 40, in <modu
rosrun or roslaunch can't find package or ERROR: cannot launch node of type
在编译自己创建的ros包过程中,往往会出现roslaunch 或 rosrun找不到自己定义的package 原因是ros系统没有正确定位package的位置。 解决办法: 1.确定CMakeList中存在catkin_package语句,哪怕空参数也行: catkin_package() 2.确定launch文件是否正确 pkg名字是否和自定义的pkg名字一致? name是否和自定义的节点
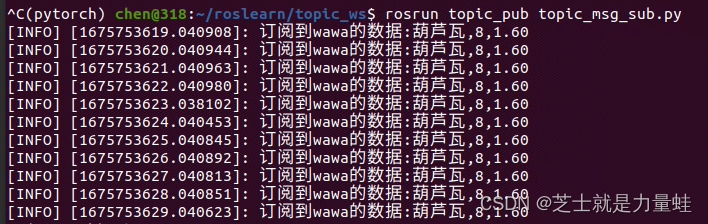
rosrun 执行python文件显示成功(Success)但是不输出数据
项目场景: rosrun 执行python文件显示成功(Success)但是不输出数据 /opt/ros/noetic/bin/rosrun:../src/xx/scripts/xx.py:Success 在msg自定义消息类型,编写发布方和订阅方程序时发现,rosrun文件,显示成功,但是并没有输出日志。 原因分析: 需要先编译!! 解决方案: 在VScode中先ct