qgc专题

Windows下使用Airsim+QGC进行PX4硬件在环HITL(二)
Windows下使用Airsim+QGC进行PX4硬件在环HITL This tutorial will guide you through the installation of Airsim and QGC on Windows, so that the hardware-in-the-loop experiment can be conducted. Hardware-in-the

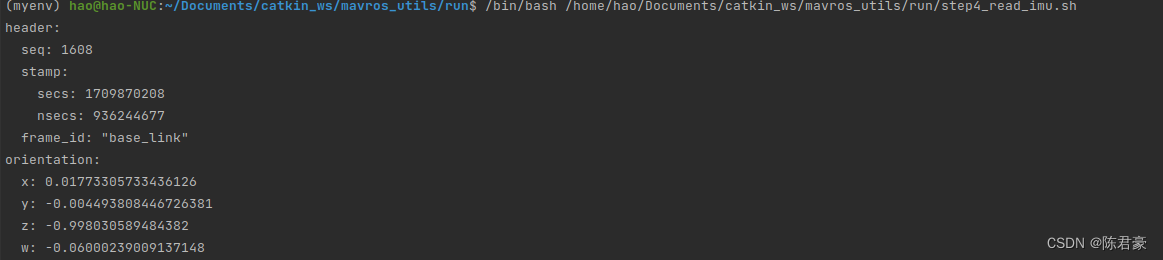
ubuntu設定QGC獲取pixhawk Mini4(PX4 Mini 4) 的imu信息
ubuntu20.04 QGC使用v4.3.0的版本 飛控pixhawk Mini4 飛控上只使用一條micro USB連接電腦,沒有其他線 安裝命令 sudo apt-get remove modemmanager -ysudo apt install gstreamer1.0-plugins-bad gstreamer1.0-libav gstreamer1.0-gl -ysu
【PX4学习笔记】04.QGC地面站的使用
目录 文章目录 目录PX4代码烧入PX4固件代码的烧入方式1PX4固件代码的烧入方式2 QGC地面站的基础使用连接地面站的方式查看关键的硬件信息 QGC地面站的Application Settings模块Application Settings模块-常规界面单位其他设置数据持久化飞机中的数传日志飞行视图计划视图自动连接到下列设备RTK GPSADSB Server Application
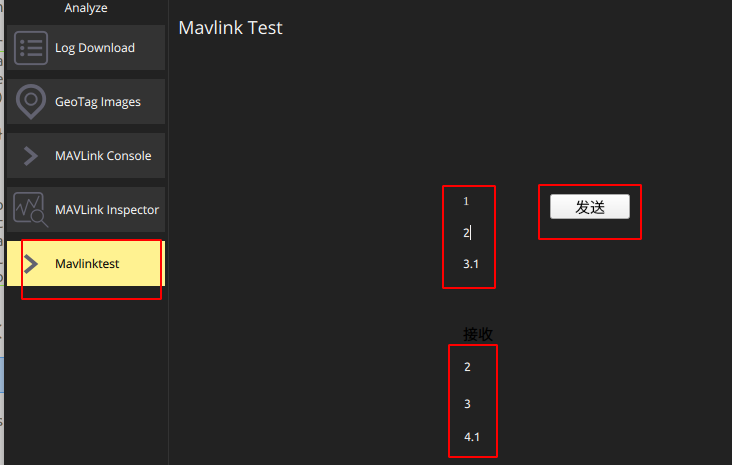
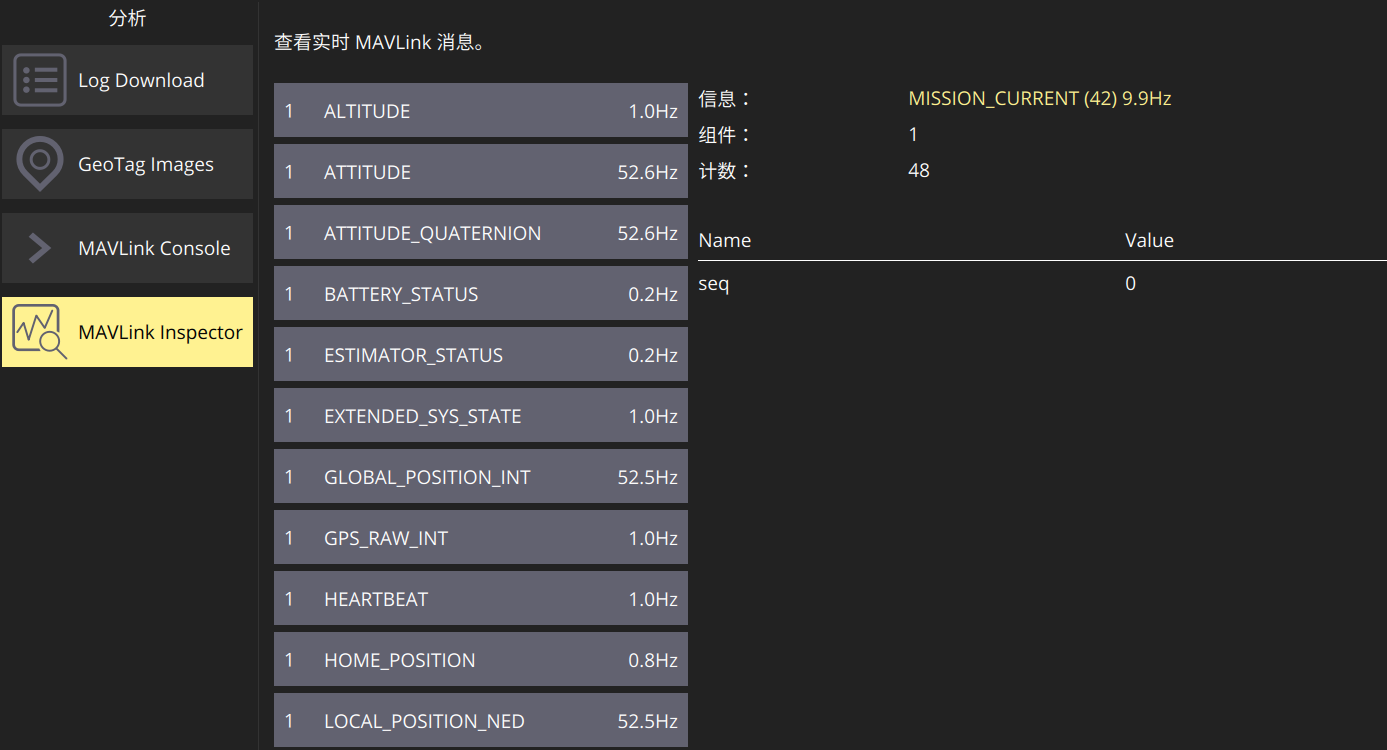
PX4实战之旅(二):通过自定义mavlink消息和QGC通信
文章目录 前言一、PX4生成自定义mavlink消息文件二、PX4创建自定义进程和uorb消息2.1创建uorb消息2.2创建自定义进程 三、PX4接收QGC消息修改mavlink_receiver.h修改mavlink_receiver.cpp 四、PX4发送消息给QGC在`src/modules/mavlink/streams`下新建`MAVLINK_TEST.hpp`修改mavlink

qgc地面站添加NTRIP(网络差分)功能
文章目录 前言一、主要的修改流程二、测试 前言 基于QGC4.2.4 NTRIP的作用是通过网络RTK账户(如千寻),将RTK差分数据通过网络获取并发送给RTK移动站,从而免去了架设RTK基站的繁琐。 MP地面站是自带NTRIP功能的,但是QGC缺不带,好在有人在github上提了issue,但是还不太翁稳定,本文就基于前人的工作,稍加完善。实现QGC稳定的NTRIP功能。 修
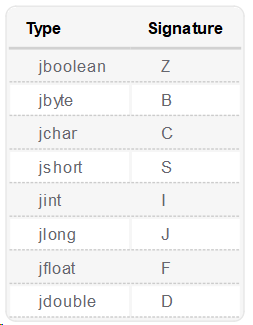
QGC 中添加海康威视摄像头记录(Qt For Android 使用 JNI 进行JAVA 与 C++ 的通讯)
文章目录 1. 配置海康威视 SDK 下载库文件移植工程文件添加动态库(.so)Android xml 配置添加 java 文件 2. JavaQGCActivity.javaHkwsManager.java 3. C++头文件添加:C++ 中调用 Java 静态函数(hcnNetSDKInit)JNI 传入规则【学习链接】 1. 配置 海康威视 SDK 下载 https:/

windows 下 QT Android 环境搭建(QGC 4.2.x + Qt 5.15.2)
文章目录 1. QT Creator 环境搭建2. JDK1)官网途径:2) 360 安装:配置 3. SDK1) 通过 Android Studio2)QT 配置中安装 姊妹篇: win10下新版QGC地面站环境搭建全面攻略(v4.x.x QGroundControl地面站搭建) windows下 QT 的 Android 环境搭建(附软件测试和ADB调试工具)
qgc地面站添加NTRIP(网络差分)功能
文章目录 前言一、主要的修改流程二、测试 前言 基于QGC4.2.4 NTRIP的作用是通过网络RTK账户(如千寻),将RTK差分数据通过网络获取并发送给RTK移动站,从而免去了架设RTK基站的繁琐。 MP地面站是自带NTRIP功能的,但是QGC缺不带,好在有人在github上提了issue,但是还不太翁稳定,本文就基于前人的工作,稍加完善。实现QGC稳定的NTRIP功能。 修

PX4天大bug,上电反复重启,连不上QGC!
一、Debug与Bug 由于自己写的代码CPU占用率过高,解锁报错 CPU load too high! 无法解锁。 于是把 COM_CPU_MAX 从默认的 90% 变为 99%(千万别这样搞,这是bug,除非想玩!)。 然后重启,飞机就反复重启。想连接QGC把参数改回来,但是连不上,下载原生PX4固件也没用! 二、debug 2.1 乱搞1 总之是CPU占用率太高嘛,于是删除
Ubuntu18.04安装QGC报错 `GLIBC_2.29‘ not found
按照官网教程,最后运行时出错。 /tmp/.mount_QGroun2NOhPP/QGroundControl: /lib/x86_64-linux-gnu/libm.so.6: version `GLIBC_2.29' not found (required by /tmp/.mount_QGroun2NOhPP/QGroundControl)/tmp/.mount_QGroun2NOhPP

QGC地面站二次开发 环境搭建过程
文章目录 将本机文件复制到安装的虚拟机系统中方法一方法二 ubuntu QT 安装过程问题一:安装开始的时候,显示磁盘容量不足。问题二:现需解决“磁盘已成功扩展。您必须从客户机操作系统内部对磁盘重新进行分区和扩展文件系统”。 将本机文件复制到安装的虚拟机系统中 方法一 安装教程 从windows系统中下载的QT安装包,没发直接拖到虚拟机里,要安装vmwar tools才

QGC的Mission表盘
MissionSettingsEditor.qml Rectangle{id:valuesRect;width:availableWidth;visible:missionItem.isCurrentItem;radius:_radius;CameraSection.qml组件} 点击Camera后 在CameraSection.qml中 Column{anchors.left:paren