puck2专题

E-puck2-webots下的仿真实现
Webots是专业的移动机器人仿真软件包。它提供了快速的原型制作环境,使用户可以创建具有物理特性(例如质量,关节,摩擦系数等)的3D虚拟世界。用户可以添加简单的被动对象或称为移动机器人的主动对象。这些机器人可以具有不同的移动方案(轮式机器人,有腿机器人或飞行机器人)。此外,它们可能配备有许多传感器和执行器设备,例如距离传感器,驱动轮,摄像机,马达,触摸传感器,发射器,接收器等。最后,用户可以对每个
E-puck2深层开发
C programming语言用于为e-puck2机器人的主微控制器开发代码。选择将ChibiOS嵌入式实时操作系统集成到固件中,因为它支持STM32F4系列微处理器,它包括一个HAL(硬件抽象层),它有很好的文档记录,它是免费的。 在开始编码之前,您需要安装开发环境及其依赖项,然后记录所有步骤。 工厂固件集成了用于处理所有传感器和执行器的e-puck2库以及使用该库的一系列演示。因此,
E-PUCK2-WIFI连接测试
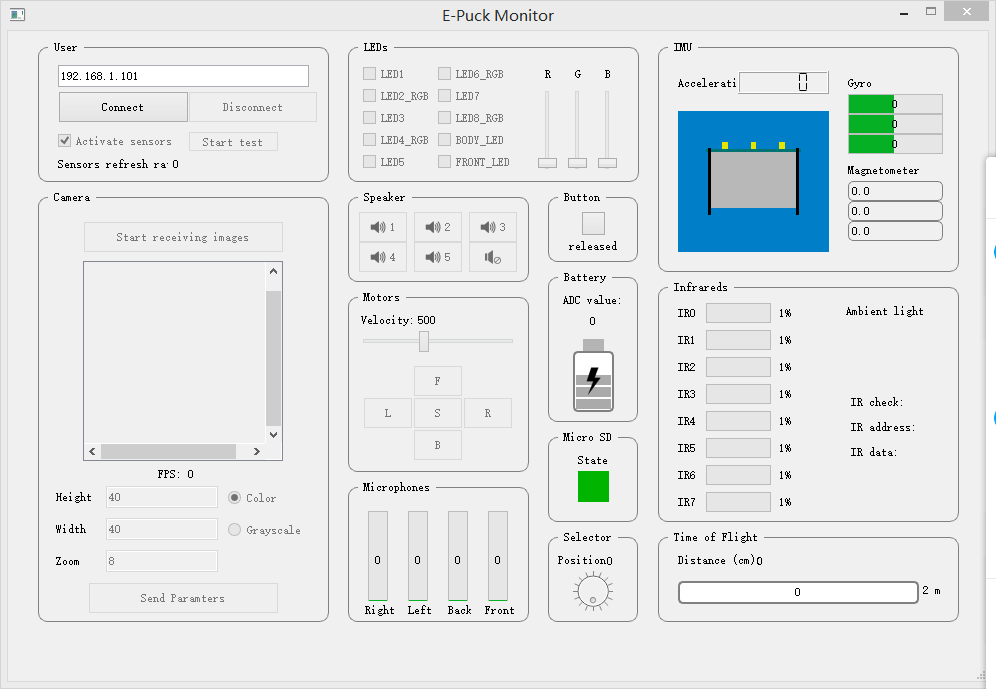
E-PUCK2官方开发了专用的WiFi应用程序,通过TCP协议与机器人进行通信。 您可以从以下链接之一下载可执行文件: Windows可执行文件 - WiFiMac(尚未推出)Ubuntu 14.04(或更高版本) - 64位对源代码感兴趣的话,可以使用git clone命令下载QT上位机界面的源码。 git clone -b wifi --recursive https://github.c

E-PUCK2-开发软件包下载
1.编程IDE(专用eclipse)(windows版本) 经过特别修改,可以直接编辑和编译e-puck2的项目。它不需要安装,所需的一切都位于给定的包装中。能够运行Eclipse所需的唯一依赖是Java。 2.Windows下Java 8 32位 3.程序下载器脚本和交叉编译工具 4.机器人源码包 转载于:https://www.cnblogs.com/kay2018/

E-puck2机器人系列教程-9.连接环境WIFI模式
WiFi通道用于与机器人通信的速度比与蓝牙进行通信的速度更快。此刻,将QQVGA(160x120)彩色图像与传感器值一起以大约10 Hz的频率传输到计算机。当然,机器人也能够从计算机接收命令。 为了通过WiFi与机器人通信,首先需要通过直接连接机器人来配置其网络参数,因为机器人最初是配置为访问点模式的,如下节所述。将配置保存到机器人后,它将自动连接到网络,您可以连接到网络。 LED2用于指示WiF
e-puck2机器人重磅推出!
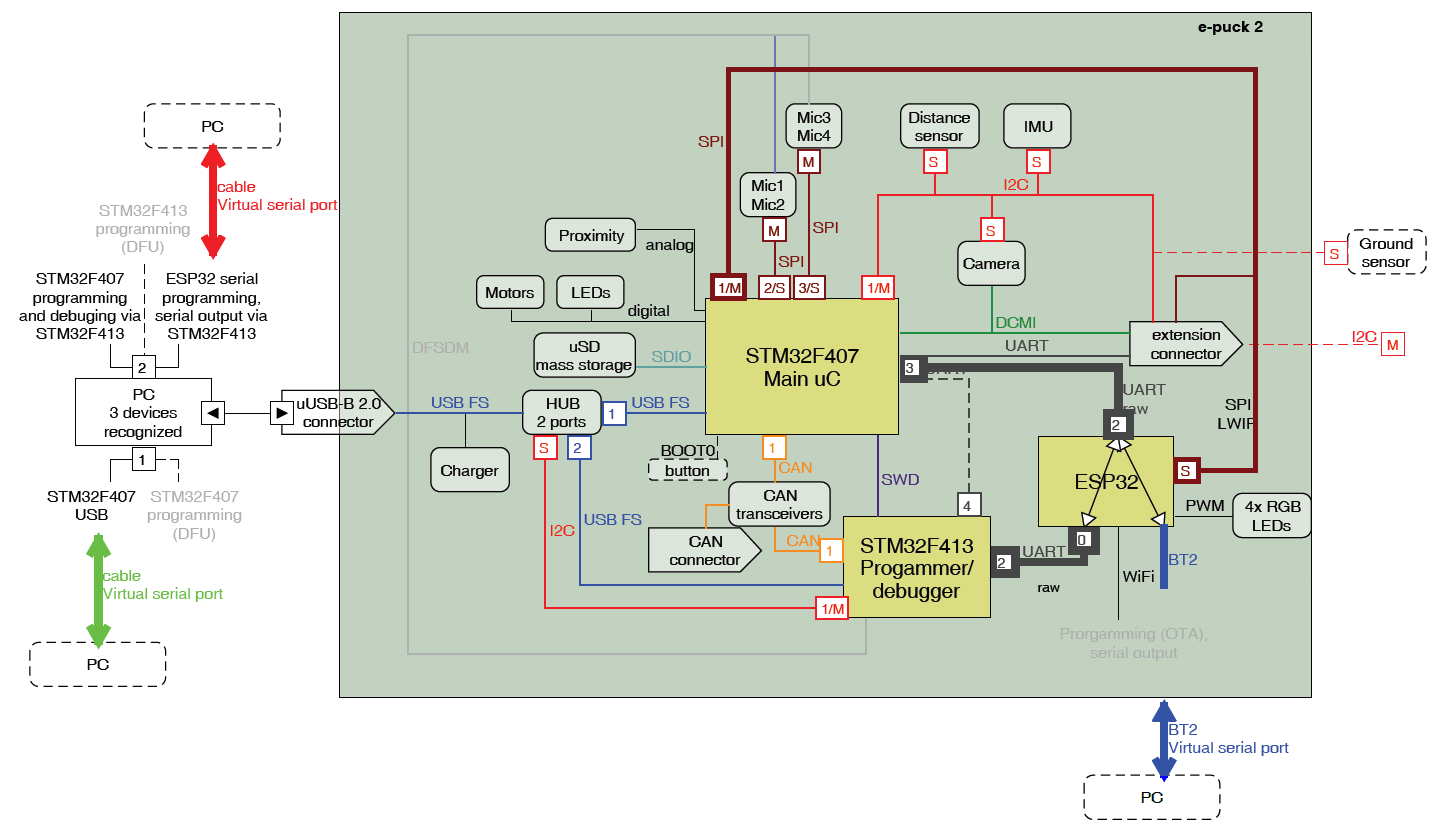
从2018年开始,e-puck2面市。大部分兼容之前版本,新款机器人更加强大,配备更多传感器。现在有WiFi,USB连接和充电,距离传感器,RGB led等等。该机器人是一个完整的系统,带有USB集线器,编程器/调试器(413),主处理器(407)和WiFi / BT模块(ESP32) 产品机构图 转载于:https://www.cnblogs.com/kay2018/p/106720