puck专题

Velodyne Lidar宣布推出适用于自动驾驶系统的突破性传感器Puck 32MR™
为移动机器人、班车等提供高分辨率实时激光雷达 加州圣何塞--(美国商业资讯)--Velodyne Lidar, Inc.今日推出了Puck 32MR™传感器,以满足自动驾驶行业的主要市场需求。这款产品为低速自动驾驶市场提供经济高效的感知解决方案,包括工业车辆、机器人、班车和无人机(UAV)。Puck 32MR将增强Velodyne强大的专利传感器技术组合,为中端应用提供丰富的感知数据。

对话InfoQ,聊聊百度开源高性能检索引擎 Puck
近日,百度宣布在 Apache 2.0 协议下开源自研检索引擎 Puck,这也是国内首个适用于超大规模数据集的开源向量检索引擎。向量检索算法在个性化推荐系统、多模态检索、自然语言处理等应用场景中都发挥着重要作用,特别是在处理大规模数据和高维特征数据时。 名称“Puck”取自经典 MOBA 游戏 DOTA 中的智力英雄 Puck,象征着飘逸和灵动。这个项目经过多年在百度内部的精心打磨,而且在

E-puck下的ROS开发
这篇文章主要介绍如何在e-puck机器人中使用ROS;基本上所有的传感器都暴露在ROS中,你也可以通过ROS将命令发送回机器人。Pyhton和cpp版本都是为了让用户可以选择其首选的编程语言而实现的。 首先,您需要安装和配置ROS,有关更多信息,请参阅http://wiki.ros.org/Distributions。或者,您可以直接下载预先安装了所需内容的虚拟机,请参阅虚拟机部分; 这是
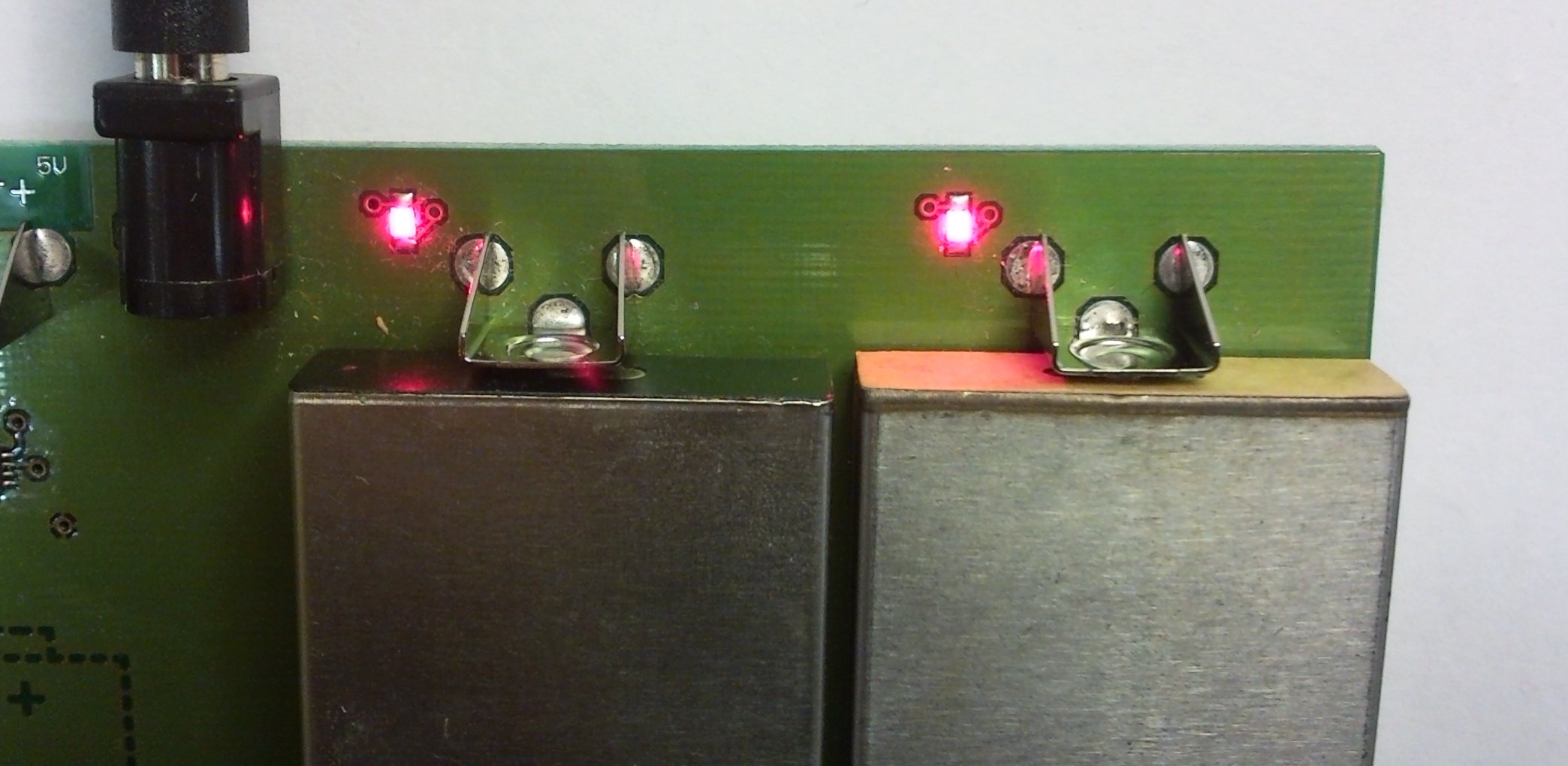
E-PUCK机器人-电池使用
电池(从2016年开始) 2016年的新电池比较重(38g)但电池容量更大(1800 mAh)。 外观类似于以前的电池,当然它们与机器人和充电器兼容。将电池插入机器人时要小心,不要刮伤塑料贴纸。 插入和取出电池时,您需要施加比以前更大的力。电池上覆盖有塑料保护装置,以避免在插入/取出电池时发生任何可能的短路。电池只能以一种方式插入:塑料保护装置未完全覆盖的一侧电池“顶部”必须朝向地面。 注
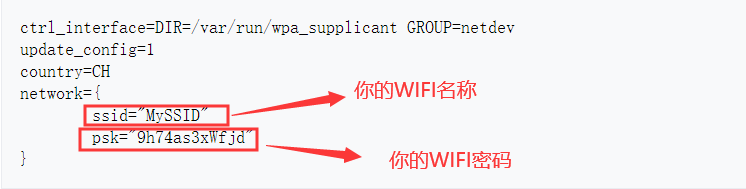
Epuck2机器人——Pi-puck开发实践
Epuck2机器人是一款最新的科研教学实践使用的多功能移动机器人。由EPFL和GCtronic两个机构合作研发生产。 这款机器人的全貌如上图所示,主控芯片是STM32F4,具备蓝牙、WIFI等通信功能。 详情请参见官网:Epuck2科研教学机器人详细资料官网 由于这款机器人是从国外进口,价格比较贵(10000RMB/台),因此需要开发使用的代价成本较高。而且开发IDE采用的是基于C语言的Ecl
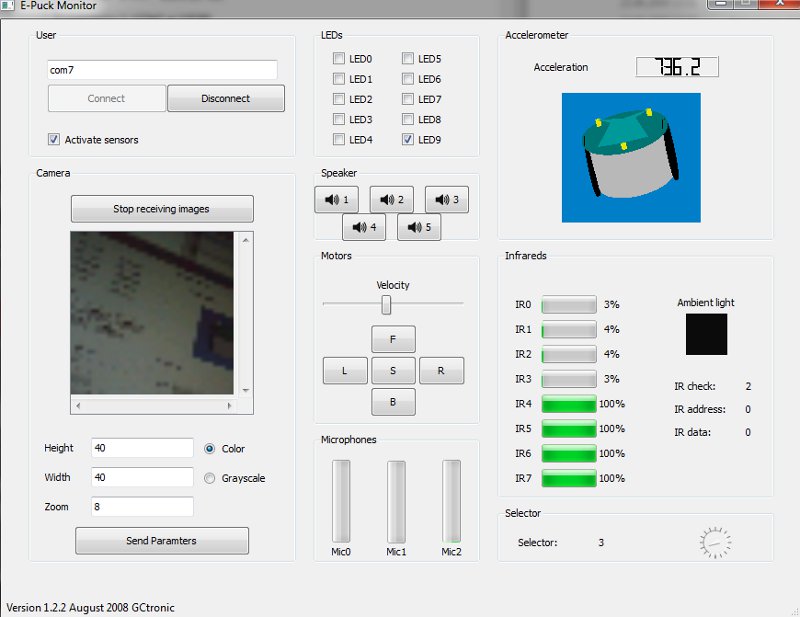
E-PUCK机器人-PC人机交互界面
为了使用方便,E-PUCK团队开发了一个在计算机上运行并通过蓝牙连接到e-puck的接口,该接口基于先进的sercom协议(选择器3); 通过该界面,可以获得有关所有传感器的信息,接收摄像机图像并控制LED和电机。 源代码可从以下链接获得: 多平台版本3.0(Monitor3.0源代码); 该应用程序是一个Qt项目,因此可以使用Qt Creator轻松处理编译; 或者可以使用qmake。

E-puck简单入门
E-puck是瑞士的一款小型的机器人,可以用于教学和实验,其外形小巧,并且整个结构也比较简单,如果出现损坏也比较容易维护。 其外形如下: 因为国内的资料很少,资料主要还是通过官方文档了解,而官方的文档也是比较少的所以出现问题时特别难以解决,所以这里我做一个简单的介绍,可以使得很多初学者在入门时会比较容易。 E-puck机器人在初始时内部是带有一些刷入的程序的,这些程序代表着不同的模式,如图的白