pnc专题

Apollo9.0 PNC源码学习之Planning模块—— Lattice规划(七):横纵向运动轨迹的优选
参考文章: (1)Apollo6.0代码Lattice算法详解——Part 7: 获得最优轨迹 (2)Lattice算法详解 0 前言 // 优选出cost最小的trajectory// 7. always get the best pair of trajectories to combine; return the first// collision-free trajectory

Apollo9.0 PNC源码学习之Planning模块(一)—— 规划概览
0 前言 规划本质就是搜索问题,数学角度来看就是寻找函数最优解 规划模块复杂的就是相关的逻辑处理和过程计算 对于规划的三维问题,目前解决方案:降维+迭代 将SLT问题分解为ST和SL二维优化问题:在一个维度优化之后,再另一个维度再进行优化,最后整合成三维的轨迹。 虽然降维后分开求解再合并的解并不是高维下的最优解,但是已经足够使用 Apollo9.0的planning代码框架 pl
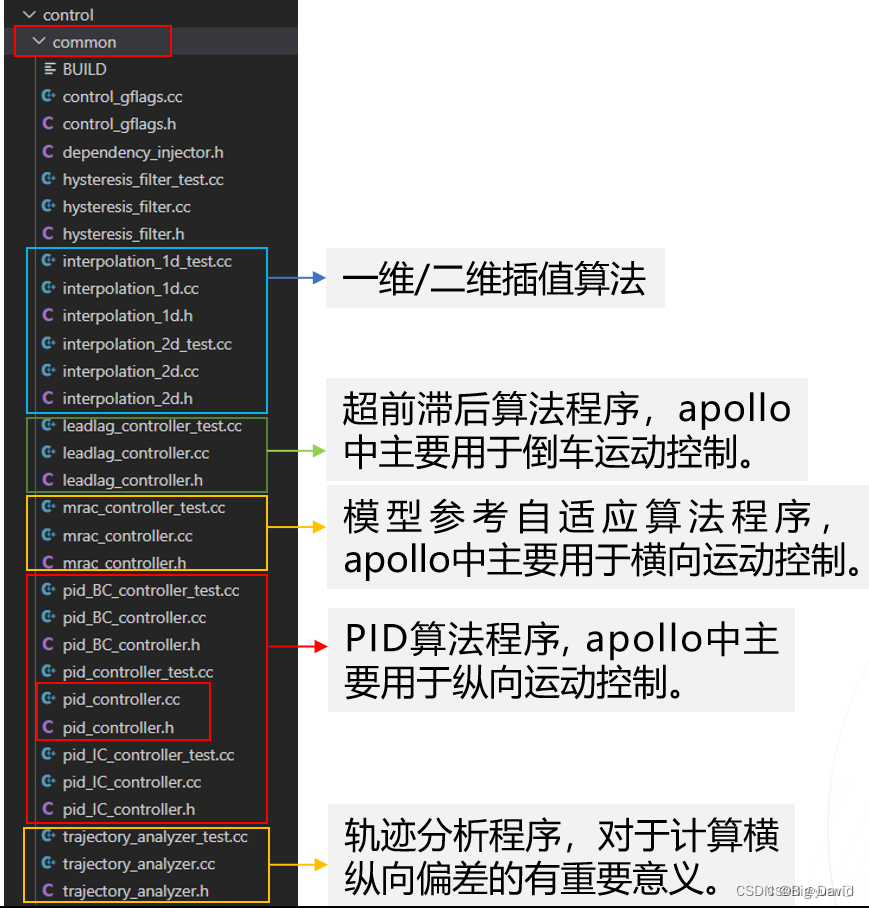
Apollo9.0 PNC源码学习之Control模块(一)
0 前言 从planning的角度看control,首先需要了解的就是相关的数据接口,规划出的轨迹(路径+速度)发给Control模块去执行 modules/planning/planning_component/planning_component.cc planning模块发布轨迹信息 planning_writer_ = node_->CreateWriter<ADCTrajectory

AutoSAR配置与实践(深入篇) 6.6 PNC功能介绍(下)_PNC收发流程和状态机切换详解
AutoSAR配置与实践(深入篇) 6.6 PNC功能介绍_PNC收发流程和状态机切换详解 PNC收发流程和状态机切换详解一、PNC接收流程1.1 PNC接收流程解析1.2 接收PN报文格式和数据流向1.3 发送端PNC流程解析1.4 发送PN报文格式和数据流向 二、PNC状态机切换示例2.1 PNC唤醒功能示意图2.2 PNC唤醒状态机切换详解 PNC收发流程和状态机切换详解

Apollo公开课Pnc专项笔记
课程链接:Apollo开发者社区_Apollo星火计划之PnC专项 (baidu.com) 一、决策技术解析及实现 (一)Apollo决策技术详解 注意:Apollo的决策和规划是一起做的,一起称之为Planning模块 Planning模块的运行机制如图,基于双层状态机,一层是Stage,一层是Task 根据场景,确定Stage,每个Stage都包含了路径的决策,规划 然

笔记41:关于CIAC_PNC_4选用控制器的一些感悟
关于车辆的控制:原本车辆的【横向控制】和【纵向控制】是耦合的,不过在模拟器上进行测试时,并不一定要那么严格,所以我们选择【横向】和【纵向】都用同一个PID控制器进行控制,然后对结果out_put乘上一个系数来得到【横向steer】和【纵向brake/throttle】 关于控制器的选择: (1)单级PID控制器的效果很一般,我只能拿整个车辆作为一个系统,把理想速度当作参考输入,把车辆实际速