plane专题
开源项目管理工具 Plane 安装和使用教程
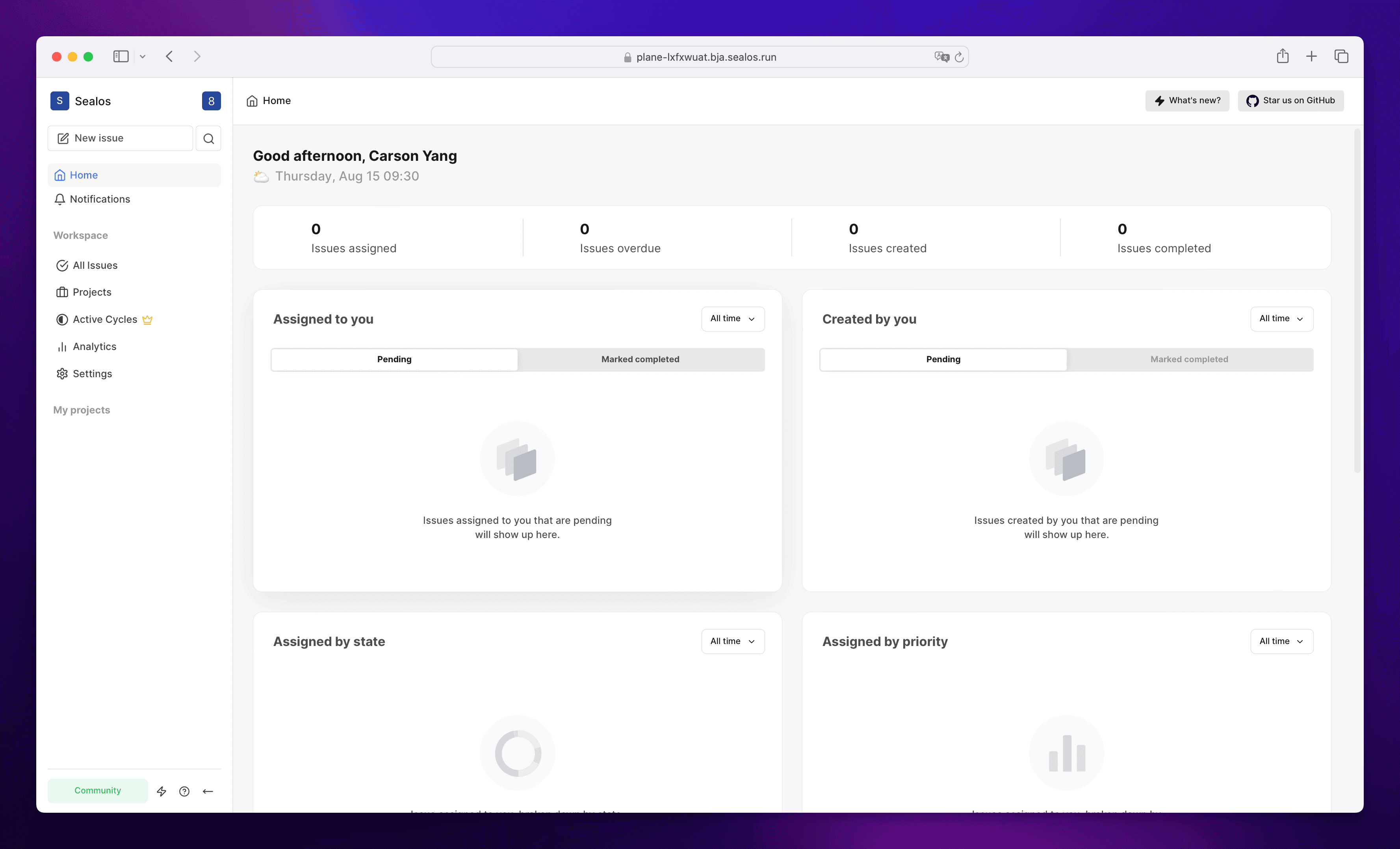
说到项目管理工具,很多人脑海中第一个蹦出来的可能就是 Jira 了。没错,Jira 确实很强大,但是...它也有点太强大了,既复杂又昂贵,而且目前也不再提供私有化部署版本了。 再说说飞书,作为国产之光,它确实在协作方面做得不错。可是当你真的想好好管理一个复杂项目时,你会发现它就像是一把瑞士军刀 —— 样样都行,可惜样样都不精。而且飞书条目多了也是需要收费的。 想象一下,如果有一个工具能够结合

关于Ardupilot的固定翼(plane)的控制
起因 由于项目原来是使用的四旋翼,并且是PX4版本的四旋翼; 如今需要对无人机固定翼进行控制,并要求使用Ardupilot的固件进行研究。 特定在此记录对固定翼的学习,以和大家分享观点和交流学习。 PX4和Ardupilot关系 PX4和Ardupilot都是固件,固件就是软件的意思。两者都是无人机开源组织发行的开源版无人机驾驶固件。 APM和pixhawk是硬件平台,在之前,APM是Ard

Camera2 YUV420_888--android image plane的解释
getPixelStride() 获取行内连续两个颜色值之间的距离(步长)。getRowStride() 获取行间像素之间的距离。 Camera2 YUV420_888 原创lbknxy 发布于2017-01-23 16:06:35 阅读数 7955 收藏 展开 Camera2 YUV420_888转RGB 官网文档介绍 Android PAI 对 YUV420_888的介绍 ,大致意

AD中layer与plane区别
pcb的制作有正负片之分,正片就是我们平常理解的那样,画线的地方有铜皮,没画线的就没有。负片则是画线的地方没有铜皮,没画线的地方才有铜皮。双面板的底层和顶层都是正片做的。在多层板里面,对于地平面和电源平面这样大块铜皮的层,一般用负片在制作,负片的数据量小,只需要将整个平面做一定的切割。正片就是layer,负片就是plane。在AD13的层设置里面就有add layer和add plane两种新建层

AD使用Layer代替Power Plane
一般4层板都是Top layer和Bottom Layer为布线层,中间两层为电源平面。但是有时候上下两层板布线比较麻烦,如果能使用内层电源平面进行布线会方便很多,当然把信号和电源分层放置对PCB的性能有好处,不过真要非常考虑PCB性能的时候,就可以上6层以上的电路板了,成本也会高不少。 为了可以在4层板中使用中间层进行布线,我们可以在添加中间层的时候选择添加Layer而不是Power Plan
unity 2017.3 + vuforia 7.0 之 Plane Finder
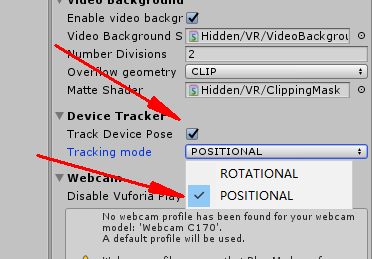
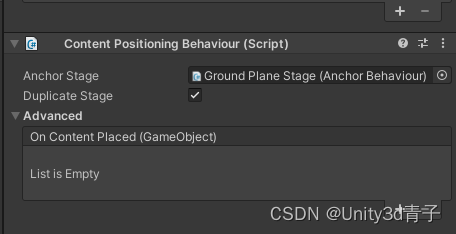
PS:如果你觉得这篇文章帮到了你,请顶我一下。 如果你只是按照上一篇教程进行了测试,那么把程序发布到IOS或者Android之后,你会发现每当你点击屏幕以后,就会把你挂在Ground Plane Stage下的内容放置一次,我们有时候是不想这么做的,需要用户只能放置一次。 vuforia7.0没有直接提供这个功能 但是留下了接口 1.进入vuforia的配置窗口 2.修改设置
ODP(Open Data Plane)
1. 摘要 本文档旨在指导新的ODP应用程序开发人员。 有关ODP的更多详细信息,请参见 ODP 主页。 Overview of a system running ODP applications ODP是一份API规范,为高性能网络应用程序的实现提供平台独立性、自动硬件加速和CPU扩展。 本文档介绍如何充分利用API的优势来编写应用程序。 2. 简介 3. ODP API
Revit-二开之创建Plane-(7)
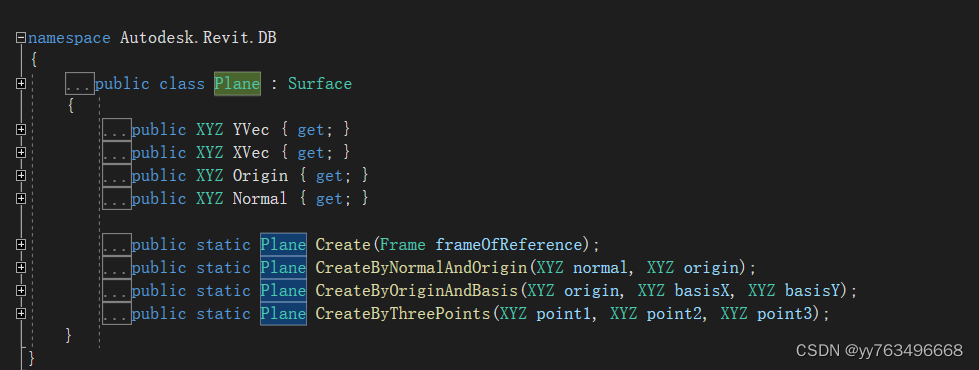
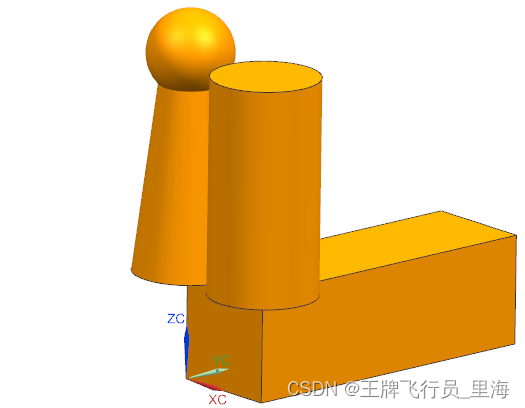
2016版本的Plane 2017版本的Plane 2018版本及以上版本的Plane 由此可见2017版本是一个分水岭 #if REVIT2016Plane plane = new Plane(uiDoc.Document.ActiveView
【Vuforia+Unity】AR04-地面、桌面平面识别功能(Ground Plane Target)
不论你是否曾有过相关经验,只要跟随本文的步骤,你就可以成功地创建你自己的AR应用。 官方教程Ground Plane in Unity | Vuforia Library 这个功能很棒,但是要求也很不友好,只能支持部分移动设备,具体清单如下: 01.Vuforia的地面识别功能仅支持的设备清单: Recommended Devices | Vuforia Library IOS

Codeforces Round #319 (Div. 1) C. Points on Plane
C. Points on Plane 题目连接 http://codeforces.com/contest/576/problem/C Description On a plane are n points (xi, yi) with integer coordinates between 0 and 10
P4学习(六)实验三:a Control Plane using P4Runtime
目录 一. 实验目的二.阅读MyController.py文件1.导入P4Runtime的库2.main部分1. P4InfoHelper 实例化2. 创建交换机连接3. 设置主控制器4. 安装 P4 程序5. 写入隧道规则6. 读取表项和计数器(注释掉的部分)7. 定时打印隧道计数器8. 异常处理9. 关闭交换机连接 二. 实验过程1. Topo2. 观察初始的工程3.S1与S2的隧道建
CGAL::Plane_3<K>平面结构
CGAL::Plane_3<K> 是 CGAL(Computational Geometry Algorithms Library)中的一个类,代表三维空间中的一个平面。在这个类中,K 是一个内核类型参数,通常代表了一组几何对象的类型和操作,比如点、向量、平面等。K 决定了这些对象的内部表示和提供的算法。 平面的表示 在 CGAL 中,一个平面通常由方程 ax + by + cz +
[NAND Flash 6.6] NAND FLASH Multi Plane Program(写)操作_multi plane 为何能提高闪存速度
依公知及经验整理,原创保护,禁止转载。 专栏 《深入理解NAND Flash》 <<<< 返回总目录 <<<< Multi Plane 简介 Multi Plane Program 时序图 Multi Plane 提速机理 Multi Plane Program 状态检查 前言 上一篇我们介绍了 NAND FLASH基本编程(写)操作及原理_NAND FLASH Program
polyhedron/polygon mesh-plane cut in CGAL
1、PMP: polygon mesh processing- slicer: http://doc.cgal.org/latest/Polygon_mesh_processing/index.html#PMPSlicer 2、\CGAL\CGAL-4.9\include\CGAL\polyhedron_cut_plane_3.h 3、http://cgal-discuss.9

BZOJ 2535 Plane 航空管制2
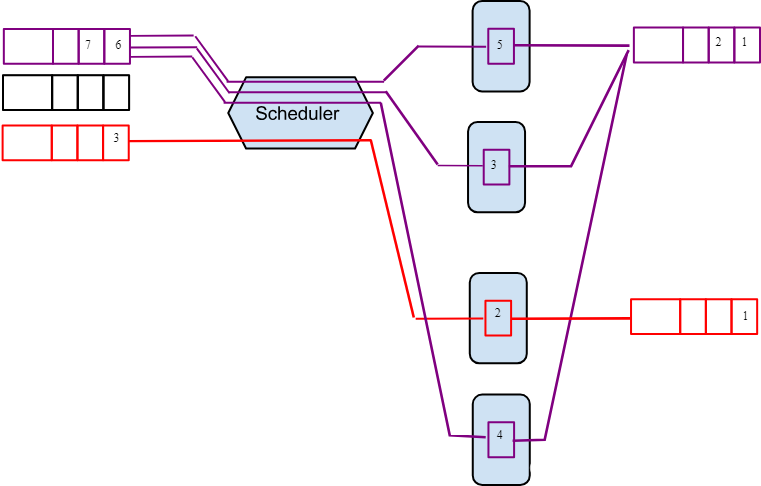
题目链接:http://61.187.179.132/JudgeOnline/problem.php?id=2535 题意:n个飞机一次出航。第i个飞机在出航序列中的序号不大于ki。另外有一些限制,<a,b>,表示飞机a的出航序号小于飞机b。(1)输出一个合法的出航序列;(2)输出每个飞机最早的出航序号。 思路:参考这里。第一问比较好搞定。对于给出的<a,b>,我们不妨建立有向边<
u3d单词学习plane
u3d单词学习plane plane n.水平; 平面; 飞机; 木工刨 posted on 2015-06-25 16:24 jiahuafu 阅读(...) 评论(...) 编辑 收藏
NX二次开发UF_CAM_set_clear_plane_status 函数介绍
文章作者:里海 来源网站:https://blog.csdn.net/WangPaiFeiXingYuan UF_CAM_set_clear_plane_status Defined in: uf_cam_planes.h int UF_CAM_set_clear_plane_status(tag_t object_tag, UF_PARAM_clrplane_status_t status
NX二次开发UF_CAM_ask_lower_limit_plane_status 函数介绍
文章作者:里海 来源网站:里海NX二次开发3000例专栏 UF_CAM_ask_lower_limit_plane_status Defined in: uf_cam_planes.h int UF_CAM_ask_lower_limit_plane_status(tag_t object_tag, UF_PARAM_lwplane_status_t * status ) overview
NX二次开发UF_CAM_ask_lower_limit_plane_data 函数介绍
文章作者:里海 来源网站:里海NX二次开发3000例专栏 UF_CAM_ask_lower_limit_plane_data Defined in: uf_cam_planes.h int UF_CAM_ask_lower_limit_plane_data(tag_t object_tag, double origin [ 3 ] , double normal [ 3 ] ) overvi
平面扫描(Plane-sweeping)深度体会
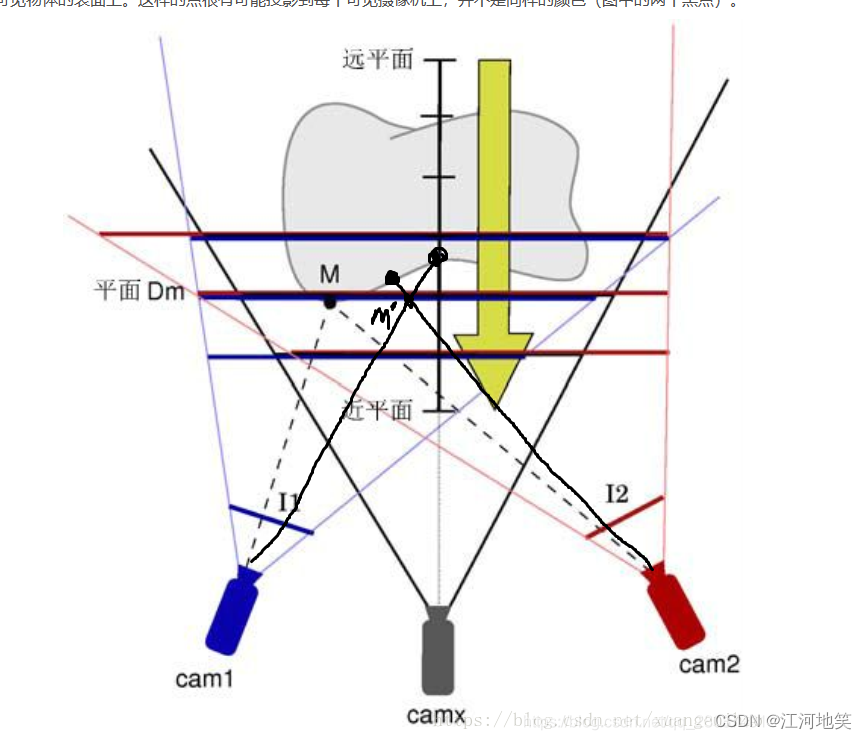
先看文章 三维重建之平面扫描算法(Plane-sweeping)_plane sweeping_小玄玄的博客-CSDN博客 Plane Sweeping | 平面扫描 - 知乎 (zhihu.com) 注意平面Dm,这是其中一个平面,平面上有一个M点,这个点也再物体上。所以会被摄像机看到,而且是一个颜色。 注意Dm上一个M'点,这个点不在物体上,这个点很有可能投影到每个可见摄像机上,并
Tiny Plane固定翼小飞机机身硬件整理开源
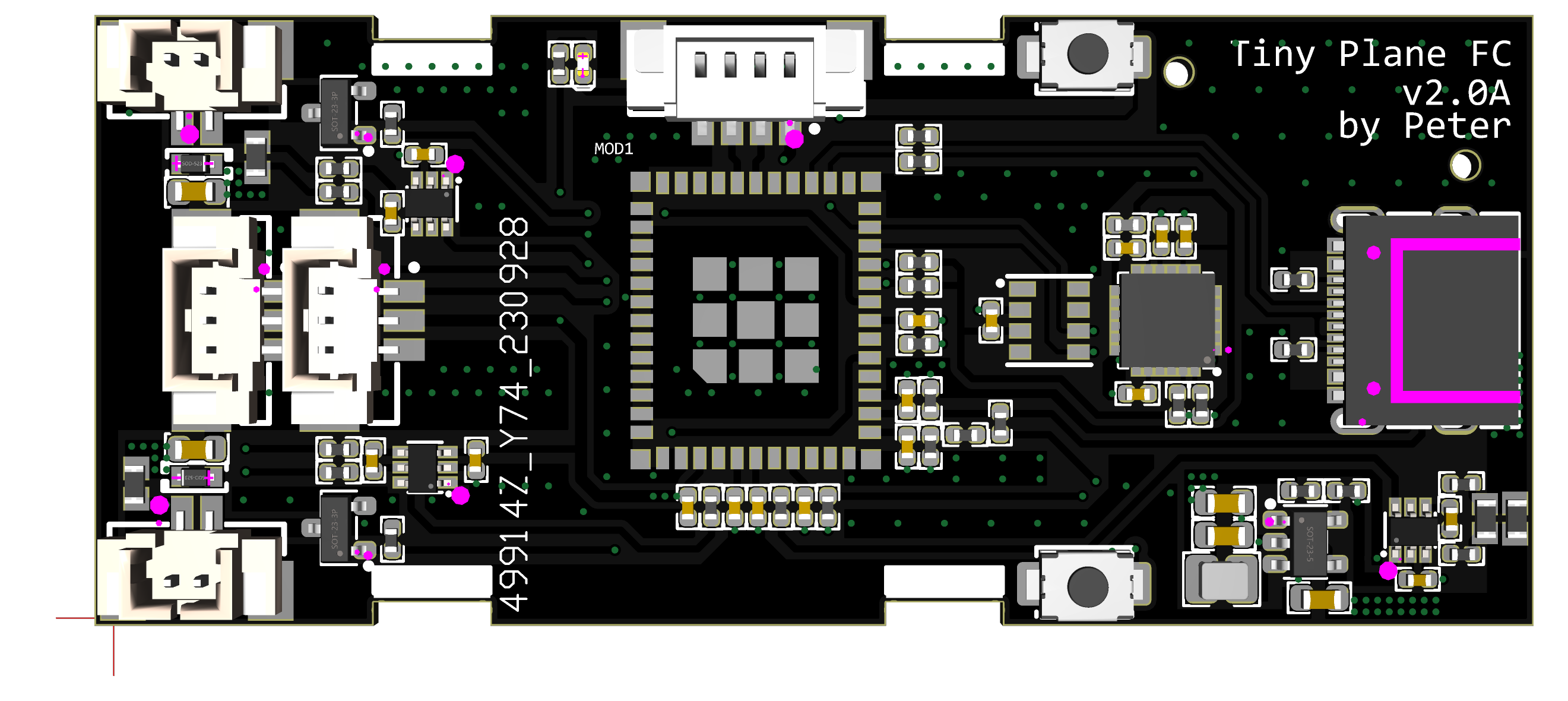
简介 Tiny Plane是一个固定翼小飞机飞控项目,旨在DIY一款操控良好、飞行时间长、可玩性高的固定翼小飞机。目前基于48cm翼展手抛机进行改装,飞控采用ESP32-C3。 特性 飞控主要特性: 单串锂电池供电,最大工作电压5.5V电源电压、电流感测锂电池温度感测DCDC降压电源,效率90%以上3轴加速度计,3轴陀螺仪气压计,高度精度10cm2路动力电机通道,支持电流感测2路数字IO通
Tiny Plane固定翼小飞机机身硬件整理开源
简介 Tiny Plane是一个固定翼小飞机飞控项目,旨在DIY一款操控良好、飞行时间长、可玩性高的固定翼小飞机。目前基于48cm翼展手抛机进行改装,飞控采用ESP32-C3。 特性 飞控主要特性: 单串锂电池供电,最大工作电压5.5V电源电压、电流感测锂电池温度感测DCDC降压电源,效率90%以上3轴加速度计,3轴陀螺仪气压计,高度精度10cm2路动力电机通道,支持电流感测2路数字IO通

如何在同一个机器里运行 Kubernetes Control Plane Master Node 和 Worker Node (Kubernetes集群)
文章目录 小结问题解决参考 小结 在Kubernetes集群的环境中,同一个机器里如何同时运行 Kubernetes Control Plane Master Node 和 Worker Node,这样同一个机器承担了两个角色,本文描述了将Kubernetes Control Plane Master Node进行设置使其承担Worker Node的功能。 问题 参考CSDN
【Unity Shader】Plane实现风格化水
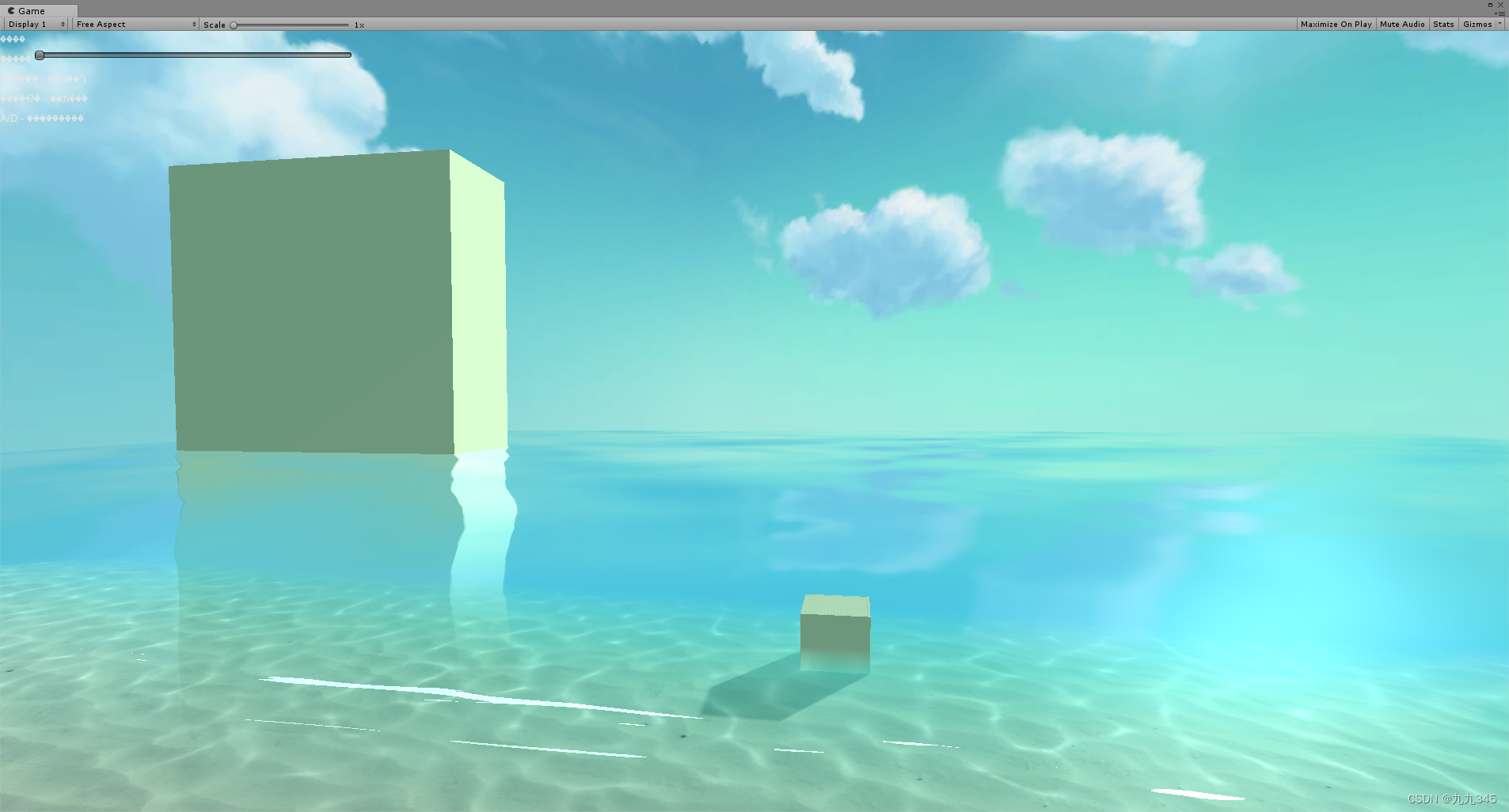
写在前面 长文警告!!!!! 很久没更新博客了,,这次是要做一个风格化水效果,是基于Plane着色实现水面效果。 项目:Unity 2017.4.40f1 Build-in,因此实现过程会跟URP有些出入(例如获取相机深度图等等),但思路都是一样的。 前期准备 效果拆解 以《RIME》 和《原神》为例: 想实现的是二者融合的感觉,总结一下包含的基本效果: 随着

Projective geometry (投影几何)(一) 之 2D project plane (2D投影平面)
2D projectie plane Points and linesHomogeneous representation of points两条直线的交点 (intersection of two lines) Ideal points and the line at infinity平行直线的交点Ideal points and the line at infinityModel for