orbit专题

Orbit 使用指南 10|在机器人上安装传感器 | Isaac Sim | Omniverse
如是我闻: 资产类(asset classes)允许我们创建和模拟机器人,而传感器 (sensors) 则帮助我们获取关于环境的信息,获取不同的本体感知和外界感知信息。例如,摄像头传感器可用于获取环境的视觉信息,接触传感器可以用来获取机器人与环境的接触信息。 在本指南中,我们将看到如何给机器人添加不同的传感器。我们将在本指南中使用ANYmal-C机器人。ANYmal-C是一款四足机器人,拥有12

Orbit 使用指南 08 | 登记注册环境 | Isaac Sim | Omniverse
如是我闻: 在上一个指南中,我们学习了如何创建一个自定义的车杆环境。我们通过导入环境类及其配置类来手动创建了一个环境实例 # create environment configurationenv_cfg = CartpoleEnvCfg()env_cfg.scene.num_envs = args_cli.num_envs# setup RL environmentenv = RLTa

Orbit 使用指南 02 | 在场景中生成原始对象| Isaac Sim | Omniverse
如是我闻: Orbit使用指南02将 深入探讨如何使用Python代码在Orbit中向场景生成各种对象(或原始对象)。一起探索如何生成地面平面、灯光、基本图形形状以及来自USD文件的网格。前置知识:如何生成空白场景,Orbit 使用指南 01 指南02对应于orbit/source/standalone/tutorials/00_sim目录下的spawn_prims.py脚本。让我们先瞅一瞅这

MESO文献调研:Magnetoelectric spin orbit
文中说的MESO的好处: Sasikanth Manipatruni et. al from Intel proposed and demonstrated the building blocks for a new logic device that enables (1) voltage scaling, (2) scalable interconnects, (3) energy scal
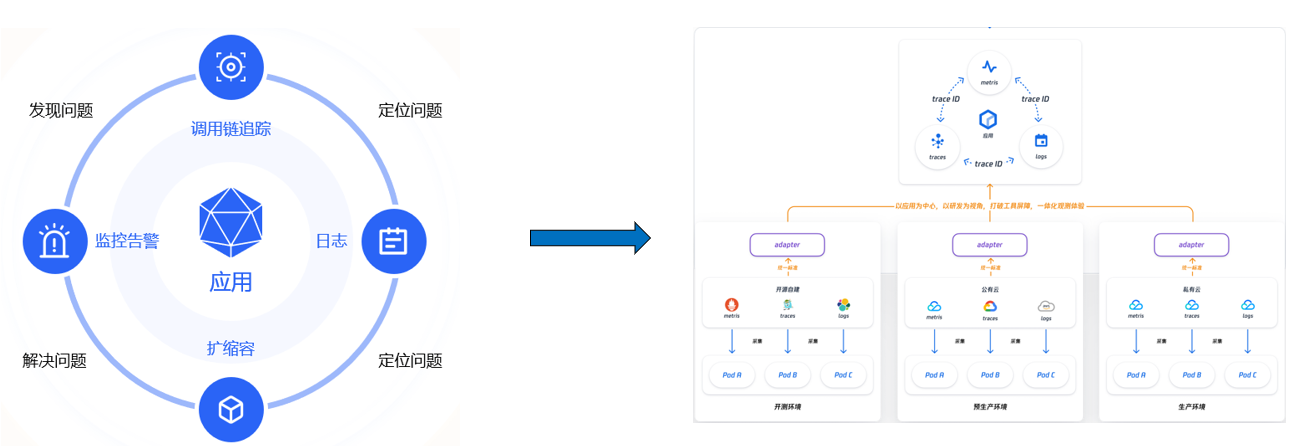
云原生应用交付平台Orbit设计理念与价值主张
本文作者:何文强——腾讯云 CODING 高级架构师。 负责 CODING DevOps产品解决方案架构设计和技术产品布道以及 CODING 云原生技术研究与落地实践。在多个技术大会担任演讲嘉宾,腾讯云 CODING DevOps 课程认证出品人,腾讯云云原生训练营核心初创成员。 精通敏捷精益、DevOps 和云原生领域,技术扎实,视野开阔,格局前瞻;在泛互、教育、工业、政务、金融等多个行业