obstacle专题

Leetcode 3275. K-th Nearest Obstacle Queries
Leetcode 3275. K-th Nearest Obstacle Queries 1. 解题思路2. 代码实现 题目链接:3275. K-th Nearest Obstacle Queries 1. 解题思路 这一题的话其实逻辑上非常简单,就是维护一个距离的有序数组,不断取第k大的元素即可。 不过好死不死的题目设置成只要这么干就一定超时,因此我们不得不想办法去优化算法复杂度,但说白
机器人导航地图——Obstacle层的障碍物-Bresenham算法详细解释
文章目录 前言一、Bresenham算法源码解析1. 函数raytraceFreespace2. 函数inline void raytraceLine3. 函数bresenham2D 二、Bresenham算法——C++代码实现总结 前言 作者在读源代码时,遇到了下述的代码void ObstacleLayer::raytraceFreespace,不是很好理解,有很多疑惑,于
机器人控制算法——TEB算法—Obstacle Avoidance and Robot Footprint Model(避障与机器人足迹模型)
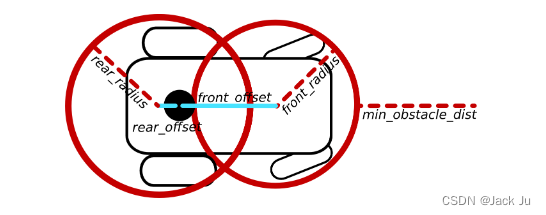
1.How Obstacle Avoidance works 1.1处罚条款 避障是作为整体轨迹优化的一部分来实现的。显然,优化涉及到找到指定成本函数(目标函数)的最小成本解(轨迹)。简单地说:如果一个计划的(未来)姿势违反了与障碍物的期望分离,那么成本函数的成本必须增加。理想情况下,在这些情况下,成本函数值必须是无穷大的,否则优化器可能会更好地完全拒绝这些区域。然而,这将需要优化器处理硬约束
机器人控制算法——TEB算法—Obstacle Avoidance and Robot Footprint Model(避障与机器人足迹模型)
1.How Obstacle Avoidance works 1.1处罚条款 避障是作为整体轨迹优化的一部分来实现的。显然,优化涉及到找到指定成本函数(目标函数)的最小成本解(轨迹)。简单地说:如果一个计划的(未来)姿势违反了与障碍物的期望分离,那么成本函数的成本必须增加。理想情况下,在这些情况下,成本函数值必须是无穷大的,否则优化器可能会更好地完全拒绝这些区域。然而,这将需要优化器处理硬约束

如何在SUMO中绘制建筑物(实现Obstacle功能)
文章目录 一、问题来源1. 版本2.问题 二、绘制多边形障碍物1. netedit.exe2. 导入OMNeT++ 三、 为什么type要设置为 building? 一、问题来源 1. 版本 我使用的是官网下载的.ova文件: 2.问题 当我们用SUMO绘制我们自己所需的地图并导入OMNeT++中使用时,会报错: 通过 报错信息:No obstacles have

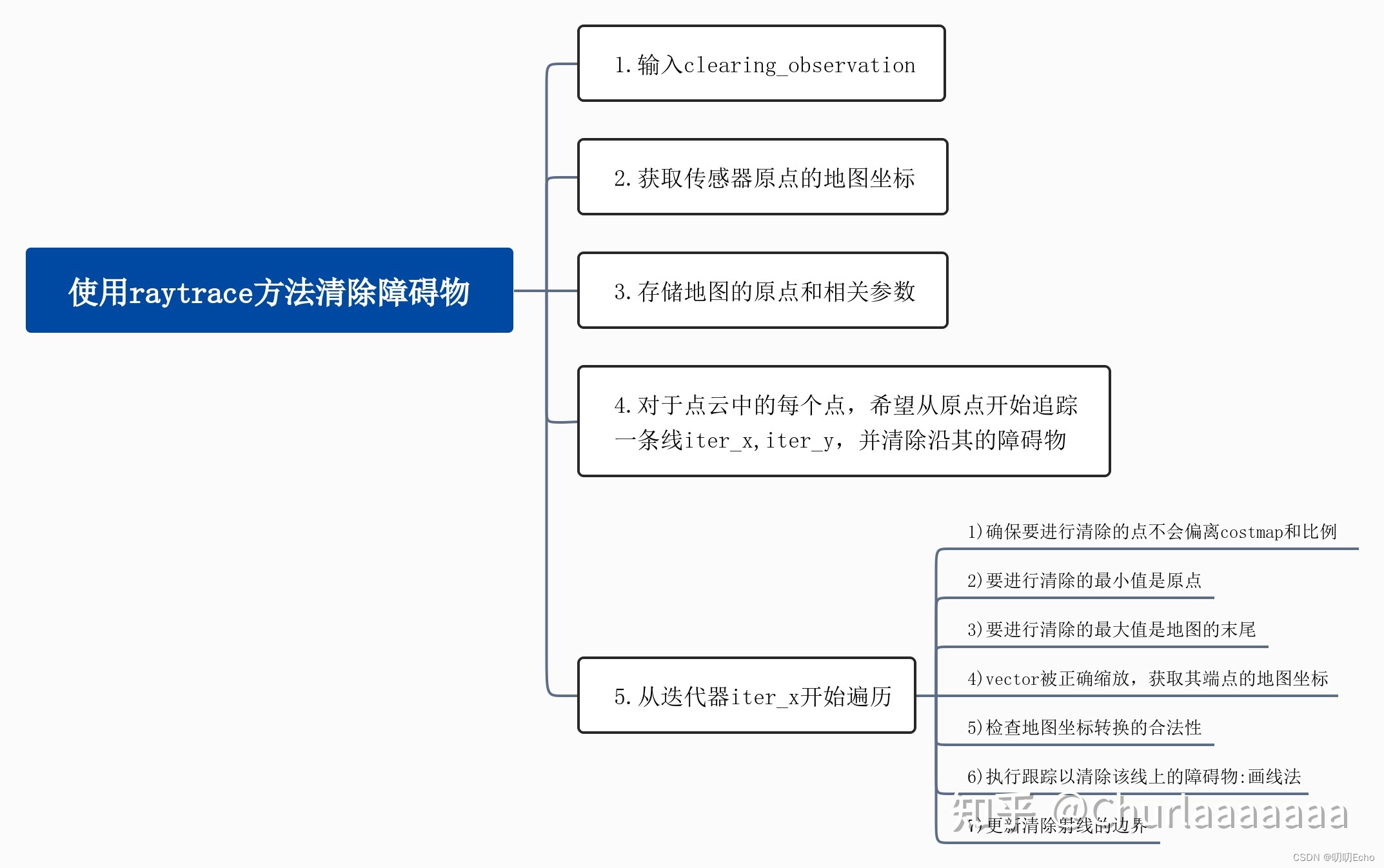
costmap_2d: obstacle_layer中关于激光雷达障碍物清除不干净的解决
参考: ROS naviagtion analysis: costmap_2d–ObstacleLayerROS Navigation Stack之costmap_2d源码分析ROS 中obstacle_layer由于激光雷达测距的局限性,导致costmap中障碍物不能被及时清除。 总的来说是,使用navigation导航时,会出现由于激光雷达测距的局限性, 会导致costmap上有行人走
百度apollo自动驾驶planning代码学习-Apollo\modules\planning\common\obstacle_blocking_analyzer代码详解
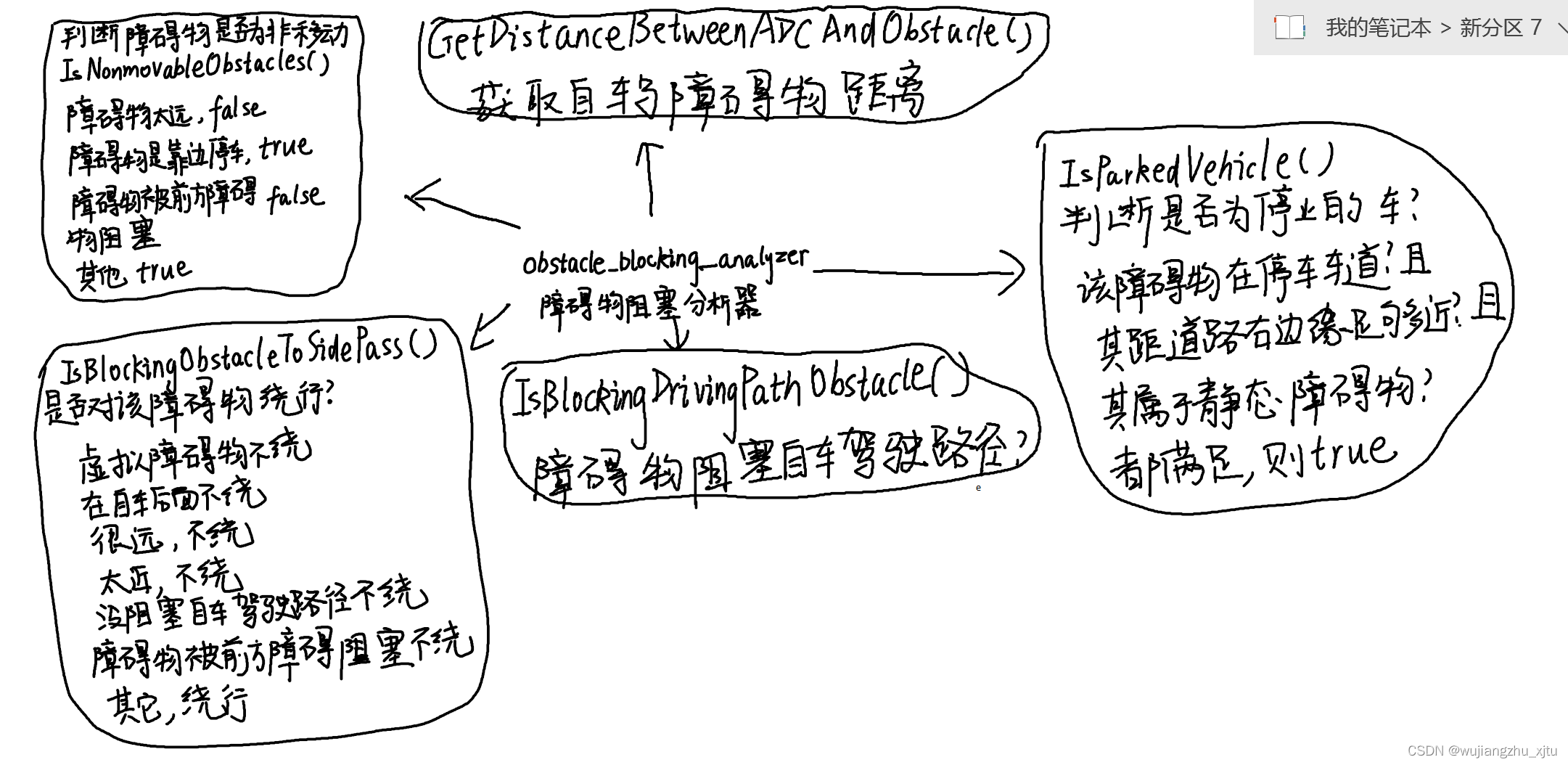
概述 apollo planning模块下modules\planning\common\obstacle_blocking_analyzer.cc/.h实现了一个障碍物阻塞分析器功能?但是没有封装成类,就是几个函数。 这几个函数的作用如下,主要都是实现对障碍物的判断,可以用来判断是否可以对前方障碍物进行绕行 obstacle_blocking_analyzer.h #include "

SFND_Lidar_Obstacle_Detection代码笔记
项目github链接: https://github.com/williamhyin/SFND_Lidar_Obstacle_Detection Lidar Sensors 激光雷达传感器通过发射成千上万的激光信号, 为我们提供高分辨率的数据. 这些激光被物体反射回传感器, 然后可以通过计算信号返回所需的时间来确定物体的距离. 我们还可以通过测量返回信号的强度来了解一点被J激光击中物体的情况.

Leetcode 1964. Find the Longest Valid Obstacle Course at Each Position
文章作者:Tyan 博客:noahsnail.com | CSDN | 简书 1. Description 2. Solution **解析:**Version 1,这道题跟Leetcode 300很像,可以构造一个最长非递减子序列,使用order作为有序序列保持最长非递减子序列长度,当新元素大于或等于有序序列的最后一个元素时,此时增加新元素到有序序列中,否则,则将新元素插入到当
udacity sensor fusion(1)Lidar Obstacle Detection学习记录
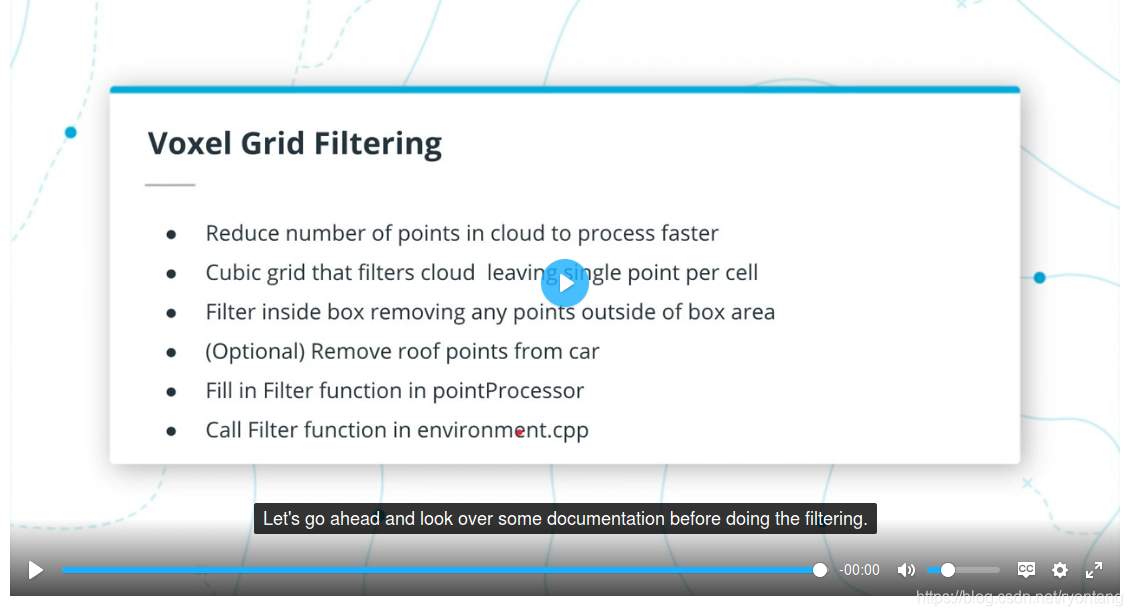
INTRODUCE TO LIDAR AND POINTS CLOUDS 10 The course starter code 告诉了这一部分代码的主要作用 13 The PCL Viewer 解释了PCL库中的VIEWER,在environment.cpp中,将初始化的viewer传引用到两个函数中 15 ~ 16 使用lidar.h中的structure 初始化struct p
costmap_2d 之 obstacle layer
obstacle layer obstacle_layer作为一个地图层,具备基本的更新边界和更新代价的功能,同时由于该层负责处理障碍物,于是衍生了一些接收障碍物数据的回调函数,比如激光回调函数,点云回调函数。 对于ObstacleLater,首先分析其需要实现的Layer层的方法: virtual void onInitialize();virtual void updat

hdu 3152 Obstacle Course
题目连接 http://acm.hdu.edu.cn/showproblem.php?pid=3152 Obstacle Course Description You are working on the team assisting with programming for the Mars rover. To conserve energy, the rover needs

bzoj 1644: Obstacle Course 障碍训练课 BFS
Description 考虑一个 N x N (1 <= N <= 100)的有1个个方格组成的正方形牧场。有些方格是奶牛们不能踏上的,它们被标记为了'x'。例如下图: . . B x . . x x A . . . . x . . x . . . . . x . . 贝茜发现自己恰好在点A处,她想去B处的盐块舔盐。缓慢而且笨拙的动物,比如奶牛,十分讨厌转弯。尽管如此,当然在必要的时候她