ndt专题

Autoware 定位之ndt定位(八)
0. 简介 这一讲按照《Autoware 技术代码解读(三)》梳理的顺序,我们来说一说Autoware中的ndt定位,这个软件包有两个主要功能:1. 通过扫描匹配进行位置估计,2. 通过ROS服务使用蒙特卡洛方法估计初始位置 1. 代码阅读 1.1 debug.cpp 这段代码是一个用于生成用于调试的可视化标记数组的函数。它接受时间戳、坐标系、缩放比例、粒子信息和索引作为输入,并返回一个

点云配准之ICP和NDT算法的高斯牛顿法求解
ICP算法 NDT算法 代码:https://github.com/taifyang/pointcloud-registration 参考:高翔《自动驾驶与机器人中的SLAM技术》
ICP和NDT匹配算法精度、速度和鲁棒性对比
注意:如下实验是针对里程计任务而进行的,默认是帧间匹配,而对于帧到局部地图匹配情况下的长时间下的轨迹精度对比,请参考我的这篇博客: 【附优化方法的ICP源码】ICP与NDT匹配算法精度对比,以及手动实现的ICP和基于优化方法的ICP精度对比 1.实验条件 前提:以下ICP与NDT算法均使用的是PCL 1.8库中提供的实现方法,它们可以设置的参数较多,这里只探讨那些最常用的参数。 数据:杭州海
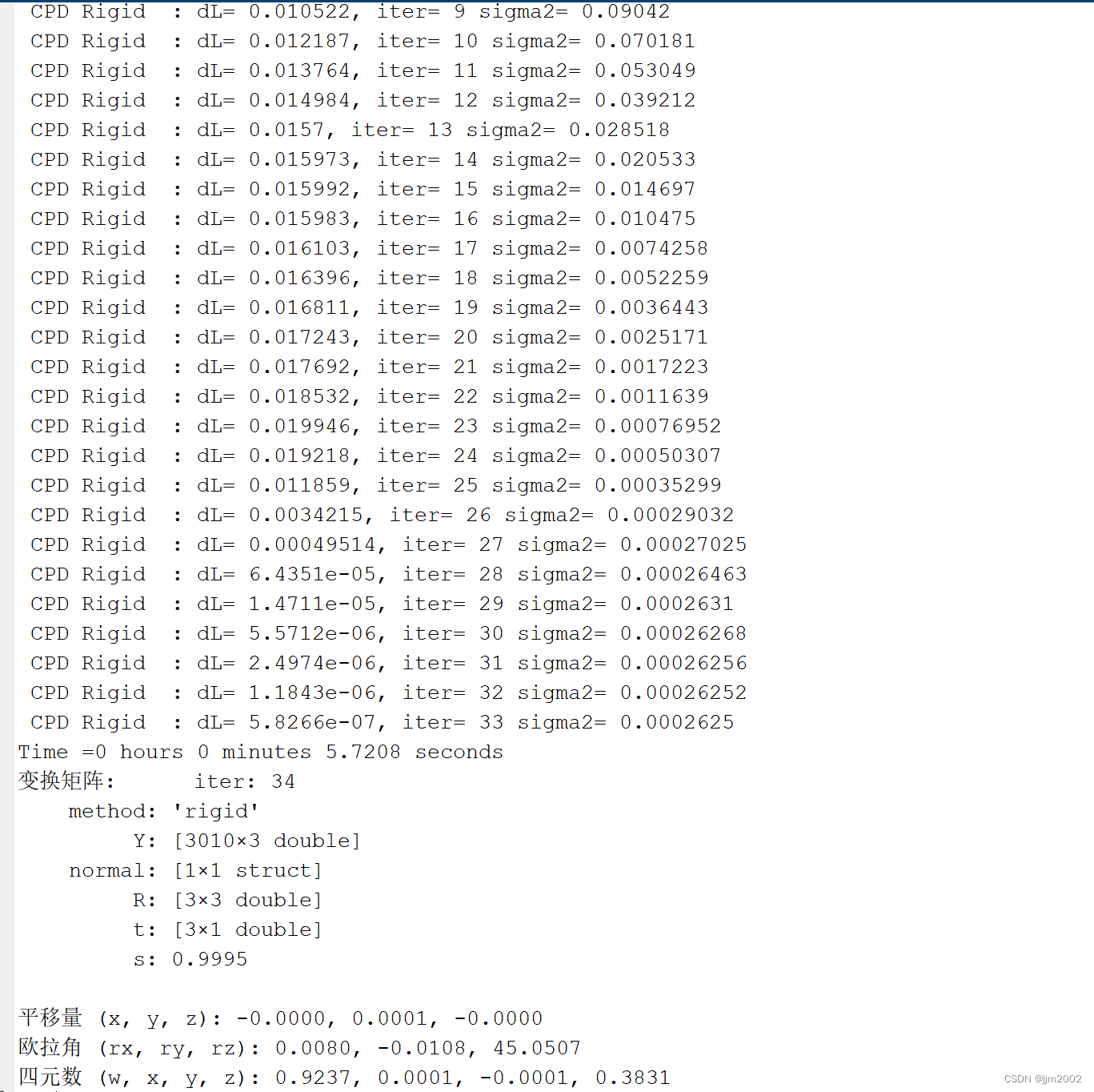
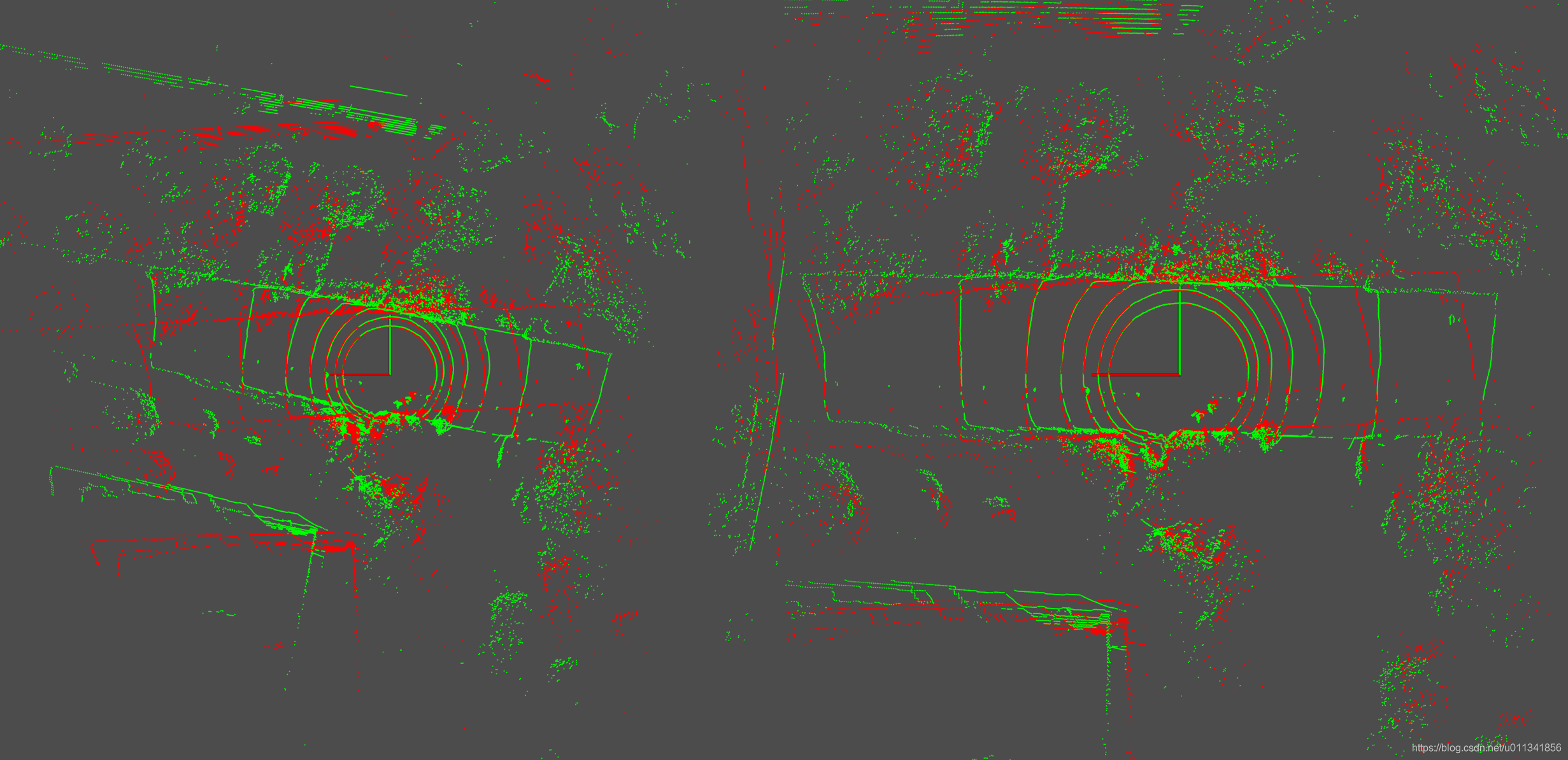
Matlab使用点云工具箱进行点云配准ICP\NDT\CPD
一、代码 主代码main.m,三种配准方法任选其一 % 读取点云文件source_pc = pcread('bun_zipper.ply');target_pc = pcread('bun_zipper2.ply');% 下采样ptCloudA = point_downsample(source_pc);ptCloudB = point_downsample(target_pc);%

利用自己的数据包实现点云地图的NDT定位
本文旨在帮助读者利用自己的数据包完成3D点云地图下的定位,公开数据包NDT:自动驾驶系统进阶与项目实战(六)基于NDT的自动驾驶高精度定位和ROS项目实战,本文只讲应用。 废话不多说,直接开始! 一、安装ndt_localizer #创建工作空间mkdir -p ~/ndt_localizer/srccd ~/ndt_localizer/srccatkin_init_works
