mmwave专题

(已开源-ICRA2023) High Resolution Point Clouds from mmWave Radar
本文提出了一种用于生成高分辨率毫米波雷达点云的方法:RadarHD,端到端的神经网络,用于从低分辨率雷达构建类似激光雷达的点云。本文通过在大量原始雷达数据上训练 RadarHD 模型,同时这些雷达数据有对应配对的激光雷达点云数据。本文的实验表明,即使是在未遇见过的场景以及存在严重烟雾遮挡的情况下,RadarHD也能生成丰富的点云数据。同时,这些生成的点云也能应用于现有的激光雷达里程计和建图方法中

基于mmWave SDK创建一个IWR6843工程模板(MSS侧)
基于mmWave SDK创建一个IWR6843工程模板(MSS侧) 这两天拿到了一套Ti毫米波雷达的评估套件(IWR6843ISK-ODS + MMWAVEICBOOST),于是便开始了漫长的学习,写下此篇以记录学习过程。 Ti官方实际上也有提供基于SYSBIOS从头开始创建工程的教程,但较为简略且没有具体演示。按照我开发单片机的惯例,既然这集成SoC内部也是MCU+DSP,那么肯定要先点个灯

TI 毫米波雷达开发系列之mmWave Studio 和 Visuiallizer 的异同点雷达影响因素分析
TI 毫米波雷达开发之mmWave Studio 和 Visuiallizer 的异同点 引入整个雷达系统研究的目标分析影响这个目标的因素硬件影响因素 —— 雷达系统的硬件结构(主要是雷达收发机)AWR1642芯片硬件系统组成MSS 和 DSS 概述MSS 和 DSS 分工BSS的分工AWR1642 组成及分工总结 雷达收发机对雷达检测效果的影响影响雷达测距效果的因素测速及其他指标的影响三种


mmWave studio加载.bin文件
打开mmWave studio,点击Sensorconfig,和PostProc 点击PostProc弹出的窗口如下图所示,点击Load.bin 此时页面如下图所示: 加载自己的.bin文件
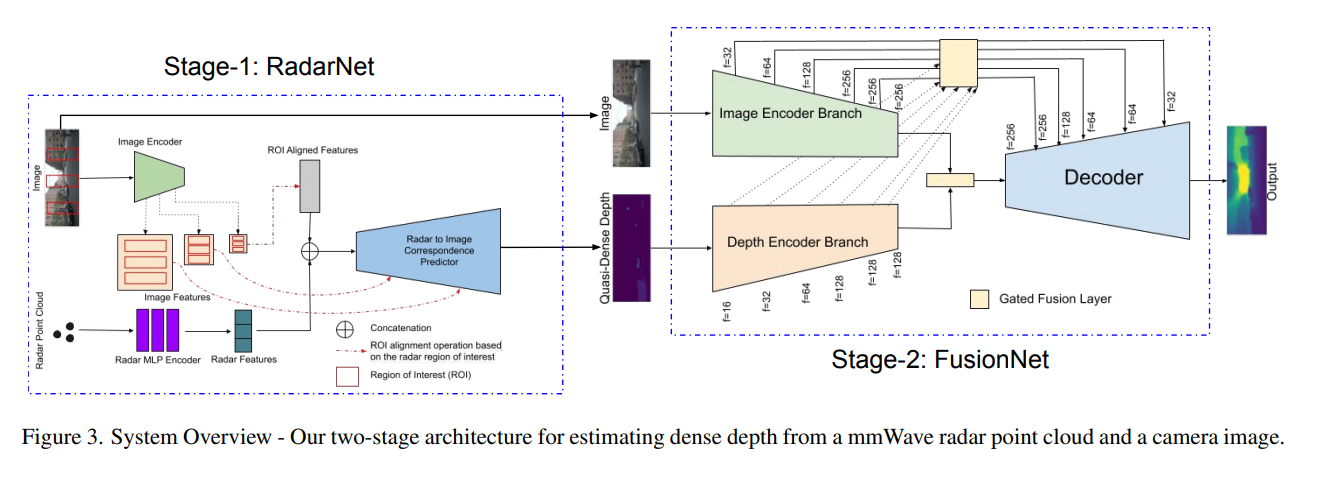
多模态感知论文阅读笔记 | CVPR 2023, Depth Estimation from Camera Image and mmWave Radar Point Cloud
原文链接:https://mp.weixin.qq.com/s?__biz=Mzg4MjgxMjgyMg==&mid=2247486213&idx=1&sn=c9680e0c959a6862bc92fea58029cb4c&chksm=cf51b9fcf82630ea7cc727665bbab30178e7652d74edc046f794111819948c5a21480172a50d#rd
【TI毫米波雷达】IWR6843AOPEVM-G+DCA1000EVM的mmWave Studio数据读取、配置及避坑
【TI毫米波雷达】IWR6843AOPEVM-G+DCA1000EVM的mmWave Studio数据读取、配置及避坑 文章目录 mmWave Studio环境配置ConnectionStaticCongfigDataConfigSensorConfig 报错解决方案 附录:结构框架雷达基本原理叙述雷达天线排列位置芯片框架Demo工程功能CCS工程导入工程叙述Software TasksDa