mavlink专题

Ubuntu下,使用mavlink_shell.py连接pixhawk
按照上一个帖子安装编译环境后,博主想使用mavlink_shell.py连接pxihawk。 按照提示进行安装结果发现报错了,后寻得http://blog.csdn.net/yangang185/article/details/72726429 归根结底还是因为缺少相关的依赖库。详细说明见上面的网址。 这里只给出解决办法: 输入指令: sudo apt-get install li

感觉mavlink对于目前的我而言还是麻烦了点,干脆用串口吧(现在回看这可能是错误的想法)
现在回看这可能是错误的想法,你自己弄也需要自己写个协议,不如直接用Mavlink ========================================================================== 感觉mavlink对于目前的我而言还是麻烦了点,干脆用串口吧,mavlink应该更多是给远程远距离通信用的,比如心跳包确保你还在连着,但是我T265也好树莓派也好都

Ardupilot飞控Mavlink代码学习
摘自:https://blog.csdn.net/lixiaoweimashixiao/article/details/80919995 Ardupilot飞控Mavlink代码学习 魔城烟雨 2018-07-05 23:36:33 4302 收藏 19 分类专栏: ardupilot学习 版权 目录 目录摘要1.Ardupilot怎么实现Mavlink初始化2.M

通过mavlink实现自主航线的过程笔记
摘自:https://blog.csdn.net/u014313096/article/details/81168304 通过mavlink实现自主航线的过程笔记 欣飞鸽 2018-07-23 15:49:13 1198 收藏 4 分类专栏: PX4 无人机 文章标签: mavlink 无人机 航点设置 版权 首先是mavlink的协议理解和移植过程(关于移植参考

一文搞定MAVLINK软件协议
转载:https://mp.weixin.qq.com/s/iGURlSS7V-5iBCEtgpzT7w 一文搞定MAVLINK软件协议 原创 L君 TBUS社区 2019-11-06 本文纯属资深程序猿个人观点,旨在让大家从不同的角度理解MAVLINK协议,文中包含的一些玩笑话,大家不要当真,看着玩玩儿呗~ 搞开源无人机的朋友最耳熟能详的莫过于它的通讯协议MAVLINK
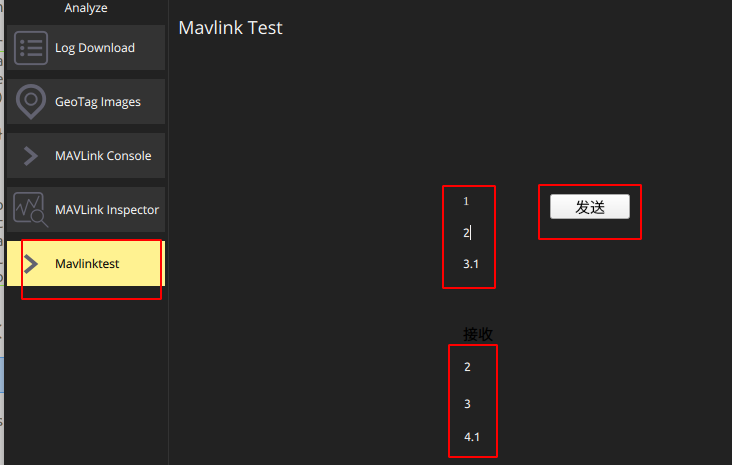
PX4实战之旅(二):通过自定义mavlink消息和QGC通信
文章目录 前言一、PX4生成自定义mavlink消息文件二、PX4创建自定义进程和uorb消息2.1创建uorb消息2.2创建自定义进程 三、PX4接收QGC消息修改mavlink_receiver.h修改mavlink_receiver.cpp 四、PX4发送消息给QGC在`src/modules/mavlink/streams`下新建`MAVLINK_TEST.hpp`修改mavlink

MAVLink功能开发移植
MAVLink功能开发移植 -----------------本文由“智御电子”提供,同时提供视频移植教程,以便电子爱好者交流学习。---------------- 1.MAVLink简介## MAVLink是一种针对微型飞行器,推出的轻量化,仅由头文件信息编码而成的软件通信协议库。 MAVLink遵循一种混合发布和点对点设计模式:主要的信息可以作为主数据流向多个目标目标进行发送,
无人机通信协议MAVLink简介
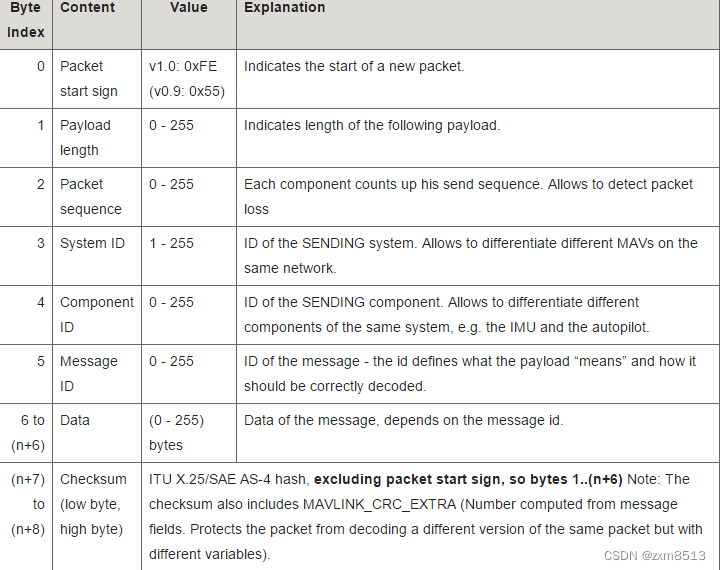
Micro Air Vehicle Link(简称MAVLink)用于无人系统(例如,机器人、无人机、无人车、无人船和无人潜航器)。它定义了一组无人系统和地面站之间的消息交换规则。此协议广泛用于无人驾驶系统中,特别是ArduPilot和PX4无人驾驶系统,MAVLink协议提供了强大的功能,不仅用于监视和控制无人系统任务,也将无人系统集成进入互联网。 1.MAVLink消息结构介绍 无人机

MP地面站二次开发教程(三)Mavlink通讯协议(5)航点的上传
目录 1、航点传输协议 航点的规划是地面站的核心功能,航点的规划分为自动规划和手动规划。自动规划是根据设定规则自动规划好航点上传。手动规划是用鼠标在地图上点击规划航点。航点的规划具有逻辑验证,不符合逻辑的航点,地面站应该可以自动告警剔除。我们在设计之初就充分考虑逻辑问题,来保证航点上传的准确性。 初步界面规划如下: 其中家的位置是航点规划比较重要的一环。整个航点规划也是应该在GPS信号良好