manipulate专题

【论文阅读】skill code 和 one-shot manipulate
文章目录 1. Interpretable Robotic Manipulation from Language针对痛点和贡献摘要和结论引言模型框架实验思考不足之处 2. One-Shot Imitation Learning with Invariance Matching for Robotic Manipulation针对痛点和贡献摘要和结论引言模型框架实验 1. Inte
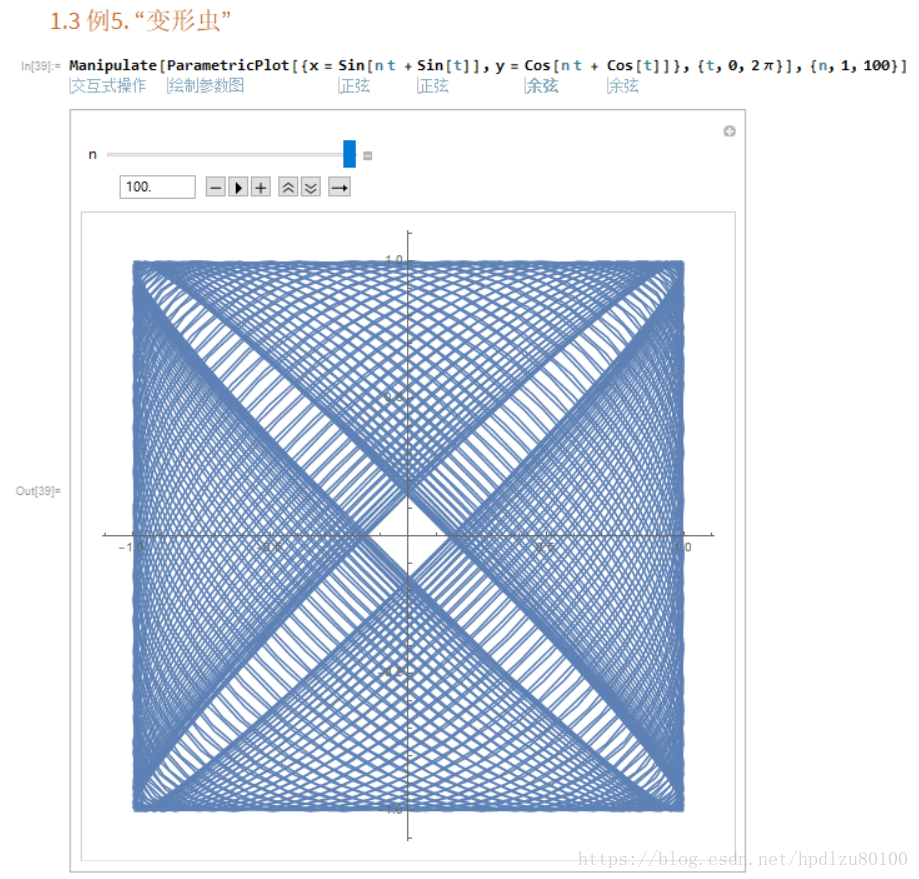
使用Mathematica动态绘制参数方程(Manipulate, ParametricPlot)
最近才明白一个道理,原来很多复杂的图形,没办法用函数来表示(因为函数要求每个自变量x只能对应唯一的因变量y)。复杂的图形,可用参数方程来表示。 1. ParametricPlot[{fx, fy,{u,uMin,uMax}] generates a parametric plot of a curve with x and y coordinates Subscript[f, x]

manipulate
manipulate - 必应词典 美[mə'nɪpjə.leɪt]英[mə'nɪpjʊleɪt] v.控制;摆布;(有技巧地)使用;巧妙地处理(问题等) 网络操纵;被操纵;被控体 变形第三人称单数:manipulates;现在分词:manipulating;过去式:manipulated; 转载于:https://www.cnblogs.com/

Manipulate bits in C
Manipulate bits in C Subscribe in a reader Enter your email address: Delivered by FeedBurner

Tactile sensor lets robots gauge objects’ hardness and manipulate small tools
A GelSight sensor attached to a robot’s gripper enables the robot to determine precisely where it has grasped a small screwdriver, removing it from and inserting it back into a slot, even when the