lkf专题

扩展卡尔曼滤波EKF,与LKF区别。IMU and GPS Fusion for Inertial Navigation,MATLAB实例学习。
MATLAB:Sensor Fusion and Tracking Toolbox 实例一:IMU and GPS Fusion for Inertial Navigation 一、IMUandGPSFusionExample.m 1、IMU的加速度计、陀螺仪的采样频率很高。Conversely,磁力计与GPS的采样频率较低。 2、数据: IMU:
#error clnk Debug\XY9-1E.lkf:1 segment .bss size overflow (358)
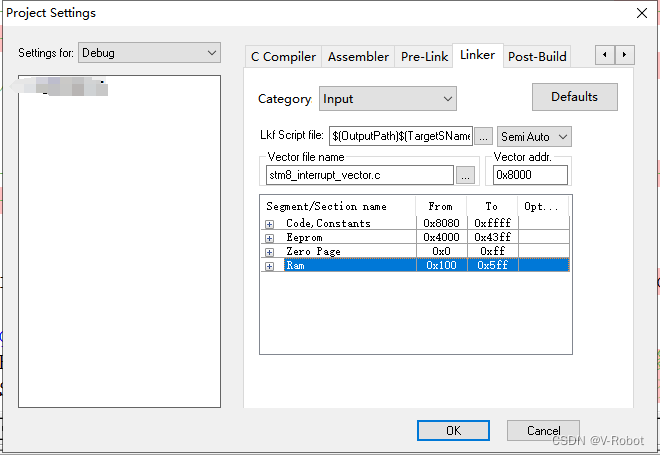
出现以上内存溢出问题,可以看下所选的STM8 的内存是否设计正确 如下 将RAM 0x5ff 更改大些,不过需要根据自己的单片机ram大小填写。 文档显示 可以到 最大到 7ff , 不过还有 512 字节的堆栈 ,慎重修改
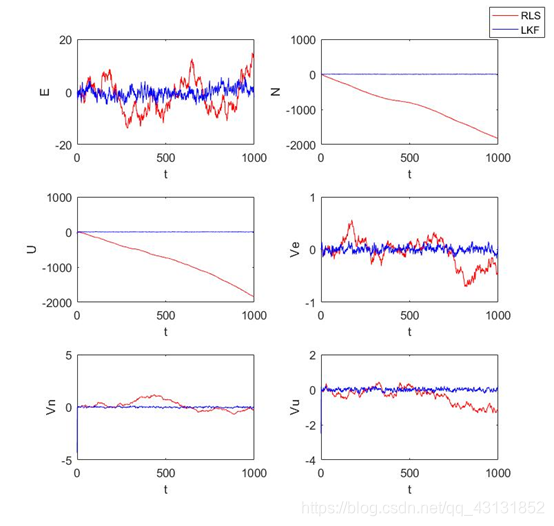
利用matlab实现线型卡尔曼滤波(LKF)
LKF算法模型 例题 实现 观测只有位置 clc;clear;%测量值模拟N=100;%观测次数t=0:1:N-1;%假定输出周期T=1;x=zeros(6,N);z=zeros(3,N);x0=[0;0;50;0;5*cos(pi/6);5*sin(pi/6)];%真值初始值mu1=[0;0;0;0;0;0];mu2=[0;0;0];Q=diag(0.
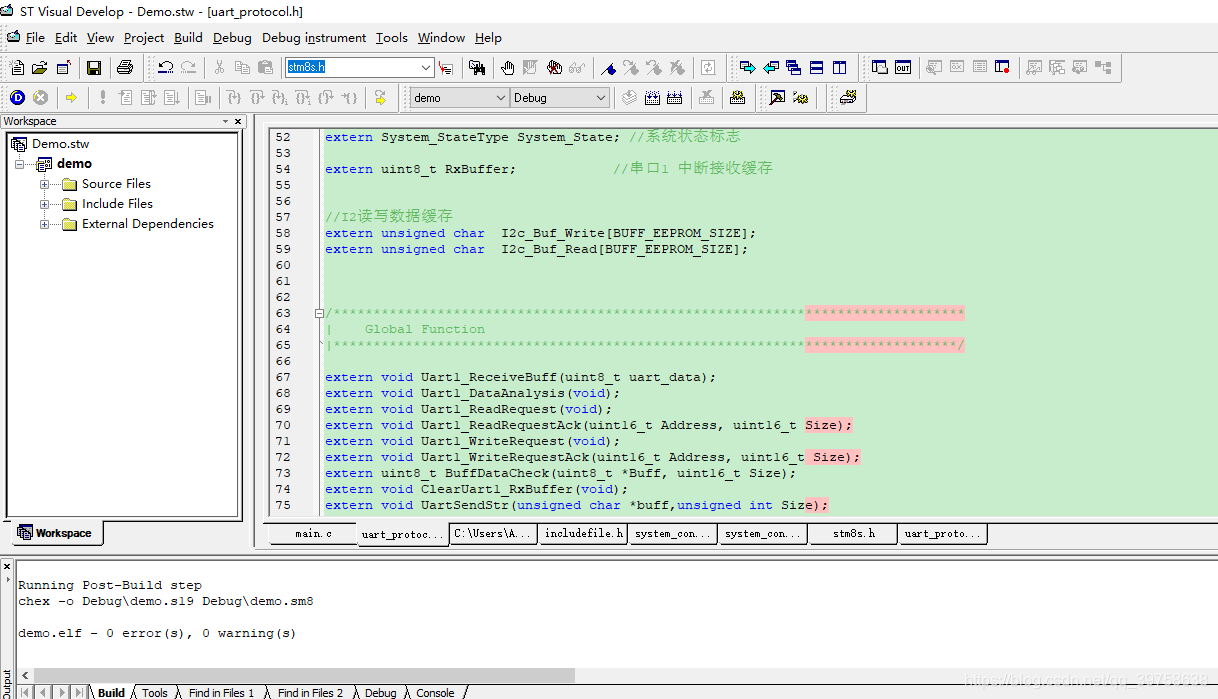
STM8 定义大数组 报错 #error clnk Debug\demo.lkf:1 bad address (0x1b6) for zero page symbol _RxBuffer 解决办法
今天再编写STM8的时候发现定义大数组编译无法通过,通过网上查询终于编译通过了,再次方便自己记录,写得有问题或者不好的不好请指教。 1.错误示例: 2.打开对话框 3.修改project settings -> C Compiler -> General ->Memory Models :选择Long Stack[+modsl]; 4.重新编译通过

STM8 STVD 关于#error clnk Debug\gpiotest.lkf:1 no default placement for segment .info. 错误!
STM8 STVD 关于对1 no default placement for segment .info. 之前在用stvd 在编译的时候出现的问题 ! 由于在网上找了 半天没有找到合理的解决方案 最后还是自己折腾了半天 弄出来的了 选择这里 默认是Debug 然后将他改成Release 编译一下,要是不放心 还可以Debug 一下 。 然后 再重新选回Debug ,因为再Release

stm8 lkf文件详解
stm8s项目开发中,根据一些升级的需求,需要修改程序起始位置等信息,而了解LKF文件对修改地址有很大的帮助。 STVD设置中,当“Auto”选择框被勾选时,.lkf文件会自动生成在项目主目录下的debug/和release/目录中。 下面以io_test Project的lkf文件为例,来进一步理解.lkf 。 在.lkf中,以“#”开头的行是注释行,为方便用户理解,将原注释删除,代之以中