lejos专题

LeJOS学习(9):一个整合传感器与马达的简单例子
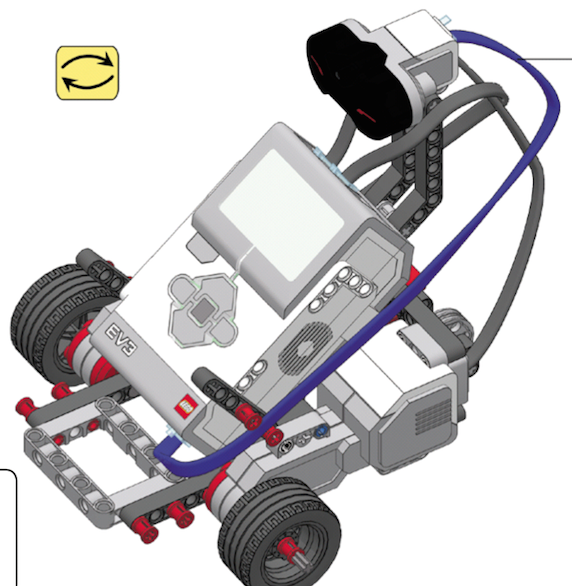
几天没有玩玩具了,今天我们来把前几天看文档的结果来整合一下。 仍是上次的那个小车,已具备两个大马达和一个红外传感器,所以我们可以做一个小车,当遇到障碍物时会转向再继续走。为了说明问题,我们先用NXT-G语言来做一个示例,程序如下图: 图形化的东西就是美观。那么我们用lejos又如何实现同样的功能呢? 方案一:使用多线程 先看代码再解释,如下 public class Si

LeJOS学习(8):Sensor的API研究-InfraRedSensor
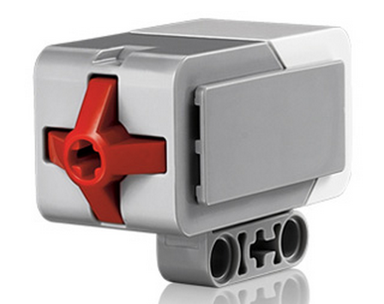
一鼓作气,继续红外传感器的研究,就是这个传感器: 红外传感器的作用只有两个:测距、定位。其实还有一个功能,可以接受远程控制,方法略有不同。 先看代码: EV3IRSensor sensor = new EV3IRSensor(SensorPort.S1);//模式一:测距,一个数,越小越近,远了就变成Infinity//SensorMode mode = sensor.g

LeJOS学习(7):Sensor的API研究-ColorSensor
继续刚才的,颜色传感器相对比较复杂一些了,它有三个用途:测颜色,测环境光,测表面亮度,对应出四个模式: getColorIDMode() //测量颜色模式一, getRGBMode() //测量颜色模式二,采样得到三个数,分别对应红R绿G蓝B,各自取值从0到1。 getRedMode() //反射光模式,采样得到一个数,介于0到1之间,0表示很暗,1表示很亮 getAmbientMo
LeJOS学习(6):Sensor的API研究-TouchSensor
继续研究传感器,因为我手上是Home版,所以只有触碰、颜色和红外三个感应器,今天先从最简单的TouchSensor开始吧。就是它了: TouchSensor只有两个状态,压下或没压下。所以代码非常简单,lejos提供了两种方法来操作传感器,一一道来。 方法一:使用lejos.hardware.sensor 在这个硬件包下有大量的传感器类,其中就有我们需要的EV3TouchSensor:
LeJOS学习(5):Motor的API研究-进阶篇
书接上回,看看API中几个比较酷的东西。 我们这回真需要弄一个小车子来测试我们的高级API了,我参考这本书《The LEGO MINDSTORMS EV3 Discovery Book》做了这么一个小车,见下图: 1,同时操作两个轮子的方法 Synchronization 前面我们说的都是让一个马达转起来的方法,但小车有两个轮子,如何做到同步?请参看如下代码 Motor

LeJOS学习(4):Motor的API研究
从最简单的马达开始学习,LCD个人感觉没啥可用的,又小又是单色,所以直接忽略。 首先可以组装一辆小车,其实现阶段,完全可以使用数据线直接马达与主机,没有太多必要去搭建模型。所以,这一步是可以略过的。 我们直接将大型马达连在主机的A口和B口上,即可开始本文的学习。 1,获取马达的实例 //方法1:标准RegulatedMotor motor = new EV3LargeRegulatedM
LeJOS学习(3):继续打造Maven的开发环境
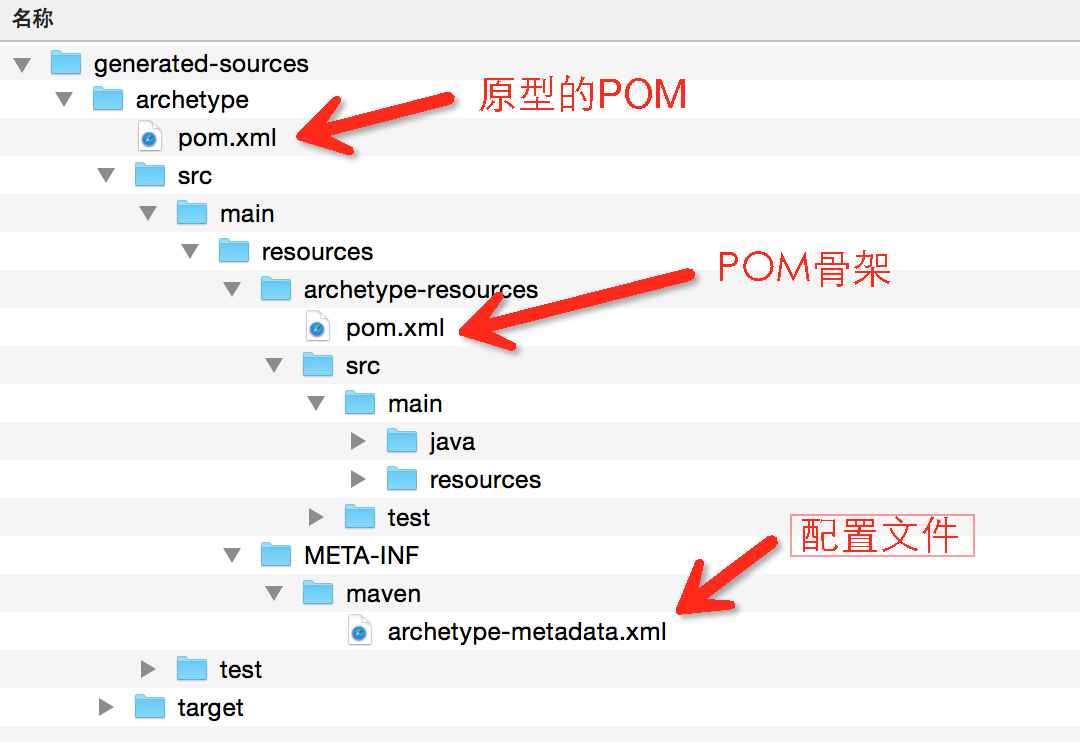
这又是一篇打酱油的博客,这两天仅仅是捣腾了一下Maven环境。 虽然已安装了Eclipse的插件,但因为习惯于Maven进行项目管理,所以,觉得有点必要把Maven环境弄弄好,方便以后开发。我要做两件事,一是做一个archetype方便生成lejos项目骨架,二是做一个插件方便发布jar到设备中。下面容我一一道来。 lejos-helloworld-archetype 我采用制作archet
LeJOS学习(2):继续 HelloWorld
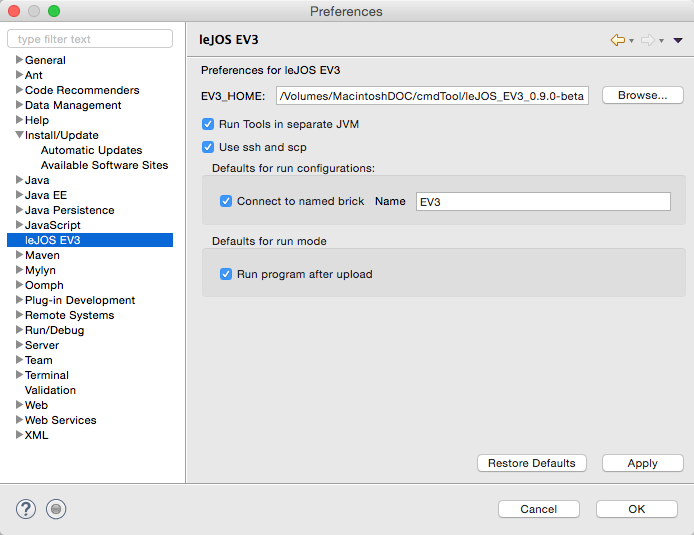
上篇说到安装LeJOS,本篇继续讨论Eclipse的安装及配置。 官网上提供了Eclipse插件的安装过程,但是非常不幸,我们在GW内部,无法连接到lejos.sourceforge.net,好在官网论坛上也提供了一个开发版插件地址,可供使用:http://www.lejos.org/tools/eclipse/plugin/ev3dev/ 安装插件的步骤就不说了,很正常,虽然时间有点长,想必