laserscan专题

ros sensor_msgs::laserscan 数据格式及velodyne_laserscan.cpp文件解析
laserscan数据格式如下(摘自wiki): 每个成员根据注释容易看出表示什么意思,强调一个容易理解错误的地方,ranges[]数组表示雷达旋转时,记录从angle_min到angle_max 角度范围内的距离数据,数组的大小并不是固定的360个,与激光雷达转速、方向角分辨有关,即以多少角度为间隔采集数据,也就是消息里面的angle_increment,(angle_max-angle_min
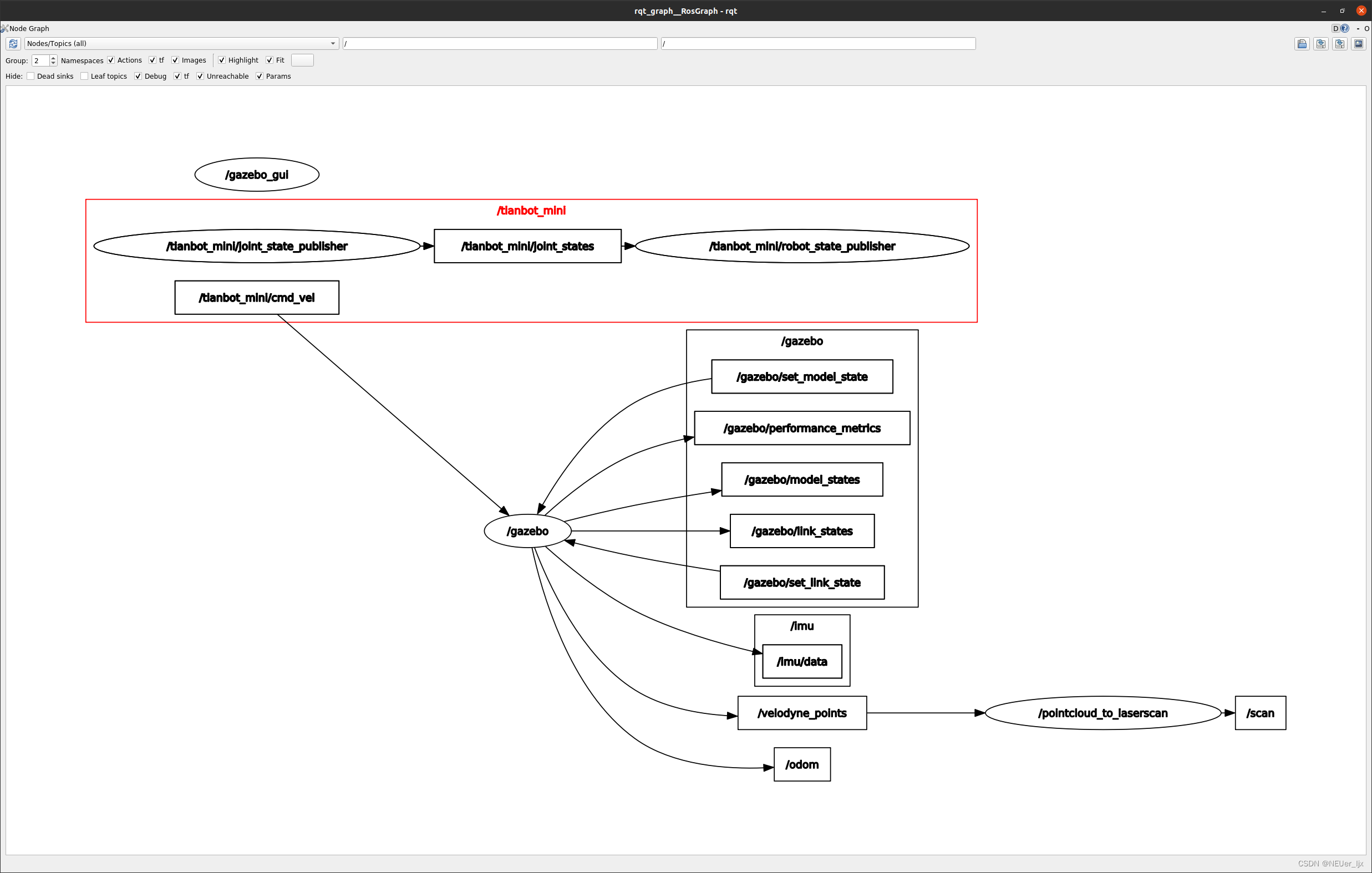
VLP16:使用pointcloud_to_laserscan将三维点云转化为二维LaserScan
一、安装pointcloud_to_laserscan包 GitHub地址:GitHub - ros-perception/pointcloud_to_laserscan at lunar-develhttps://github.com/ros-perception/pointcloud_to_laserscan/tree/lunar-devel 注意避坑:不能用git clone来下载,即

ros2 中 深度图像转雷达扫描节点 “depthimage_to_laserscan” 的变动
这是ros1的launch文件: <!-- Depth Image to Laser Scan Node --><node name="depthimage_to_laserscan" pkg="depthimage_to_laserscan" type="depthimage_to_laserscan"