las专题

MATLAB 低版本Matlab-读取LAS格式点云文件并可视化(78)
las格式的文件属于标准的激光点云文件,也是最常见的点云文件,下面是读取并可视化方法 MATLAB 低版本Matlab-读取LAS格式点云文件并可视化(78) 一、LAS文件简介二、算法实现1.代码2.下载地址 总结 之前介绍过MATLAB自带的Las文件读取函数:(稳定,推荐使用该方法) MATLAB 读取las格式的点云文件 (21) 下面将介绍的是如何在Matla

LAS 开源框架实例
LAS 开源框架梳理 (kaldi+pytorch版本) 参考 开源框架github地址 W. Chan, N. Jaitly, Q. Le, and O. Vinyals, “Listen, attend and spell: A neural network for large vocabulary conversational speech recognition,” in ICASS

CTC,RNN-Transducer, LAS
1、CTC ( Connectionist Temporal Classification) 网络结构 参考地址: CTC白话参考地址 其中CTC-loss 部分使用到了动态规划的思想。 大目标是: m i n ∑ B ( π ) = z ∏ t = 1 T y π t t m i n ∑ B ( π ) = z ∑ t = 1 T l o g ( y π t t ) min \su

使用Python读取las点云,写入las点云,无损坐标精度
目录 1 为什么要写这个博文2 提出一些关键问题3 给出全部代码安装依赖源码(laspy v2.x) 1 为什么要写这个博文 搜索使用python读写las点云数据,可以找到很多结果。但是! 有些只是简单的demo,且没有发现/说明可能遇到的问题;有些晦涩难懂,不够实用主义;有些须付费观看,没有开源精神。 本人在使用laspy v2.3读写点云文件时,着实被坐标精度问题难到了
重建大师6.2.24版本可以只用点云las数据建模么?
答: 可以支持,具体的操作教程:https://daspatial.com/static/file/%E9%87%8D%E5%BB%BA%E5%A4%A7%E5%B8%88%E7%94%A8%E6%88%B7%E6%89%8B%E5%86%8C.pdf?t=20231113 重建大师是一款专为超大规模实景三维数据生产而设计的集群并行处理软件,输入倾斜照片,激光点云,POS信息及像控点,输出高

《open3D+pyqt》第一章——las格式点云读取
《open3D+pyqt》第一章——las格式点云读取 安装文件代码更改后续 安装 pip install laspy 文件代码更改 读取文件部分更新如下即可: import laspydef read_pointcloud(self):# print("test well")fileName, filetype = QFileDialog.getOpenFileName
Las与Laz点云文件格式的区别
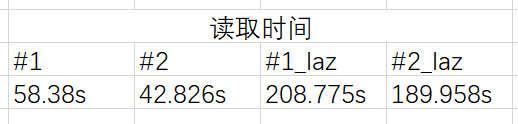
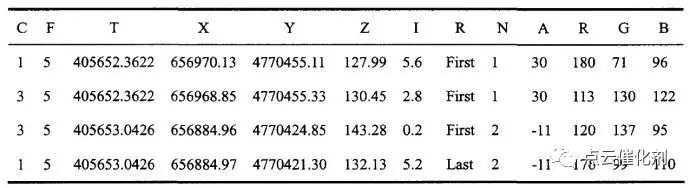
Las与Laz点云文件格式的区别 Las与Laz点云文件的读取LasLaz点集压缩LASzip读取las与laz实验 Las与Laz点云文件的读取 最近研究了一下点云文件格式las与laz,读取方式的话调用的是LAStools库。编译方式没有什么特别的,可能Cmake生成后编译不通过,原来每个exe中的cpp文件有一行代码少了个括号,自行加上即可。通过对代码的调试与文献阅读,总体

湖仓一体架构在火山引擎 LAS 的探索与实践
动手点关注 干货不迷路 火山引擎湖仓一体分析服务 LAS(Lakehouse Analytics Service),是面向湖仓一体架构的 Serverless 数据处理分析服务,提供字节跳动最佳实践的一站式 EB 级海量数据存储计算和交互分析能力,兼容 Spark、Presto 生态,帮助企业轻松构建智能实时湖仓。 LAS 服务是什么?LAS 有哪些优化特性?本文将从基础概念、数据库内核特性优
利用python实现激光雷达LAS数据滤波的7种方式,使用laspy读写
激光雷达(LiDAR)数据在实际应用中可能受到噪声和不完美的测量影响,因此数据去噪和滤波方法变得至关重要,以提高数据质量和准确性。以下是一些常用的激光雷达数据去噪与滤波方法。 原始数据如下: 1. 移动平均滤波(Moving Average Filter): 移动平均滤波是一种简单的滤波方法,通过计算数据点周围一定范围内数据的平均值来平滑数据。这种方法适用于去除高频噪声,但可能会导致边缘信息
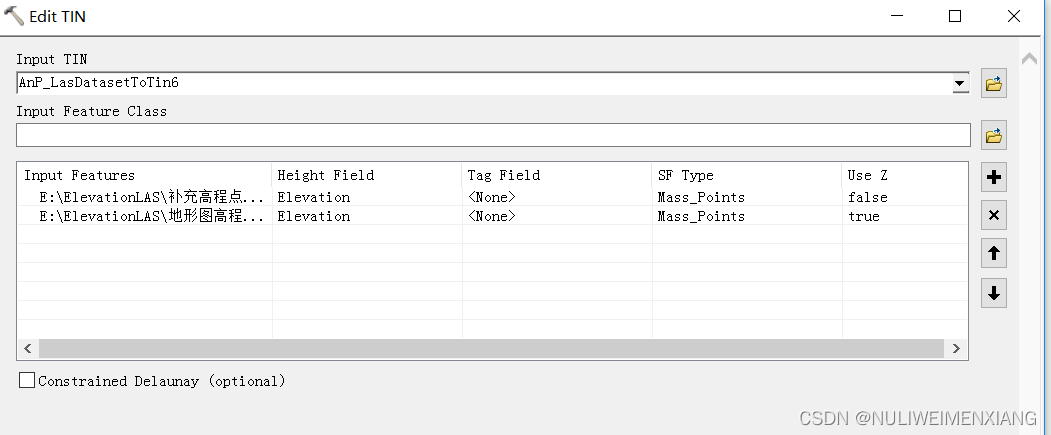
ArcGIS处理点云las
DOM+DEM做个2.5D的地形模型,拿到的数据是las格式的点云,不在是常见的地形图(包含等高线和高程点)。las是一个新事物,感谢项目组给了我这个接触点云的机会。那么问题来了,ArcGIS中怎么处理las点云? 第一步,创建LAS数据集,将las文件添加到LAS Dataset,注意设置LAS文件和LAS数据集的相对路径。加载LAS数据集到ArcMap中, Data percentage的值
对OSPF LAS浅浅探索
LAS中一共有七类 路由器LSA(Router LSA)网络LSA(Network LSA)网络汇总LSA (Network summary LSA)ASBR汇总LSA(ASBR summary LSA)自治系统外部LSA(Autonomous system external LSA)组成员LSA(Group membership LSA)NSSA外部LSA(NSSA External LAS